The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-12-17 10:25:10 -0500 | received badge | ● Student (source) |
| 2021-12-08 03:51:40 -0500 | received badge | ● Taxonomist |
| 2020-09-13 13:42:58 -0500 | received badge | ● Famous Question (source) |
| 2020-06-23 09:08:17 -0500 | received badge | ● Famous Question (source) |
| 2020-04-28 04:08:22 -0500 | received badge | ● Notable Question (source) |
| 2020-04-01 04:42:08 -0500 | received badge | ● Famous Question (source) |
| 2020-04-01 04:42:08 -0500 | received badge | ● Notable Question (source) |
| 2020-02-25 10:59:19 -0500 | received badge | ● Popular Question (source) |
| 2020-02-25 10:59:19 -0500 | received badge | ● Notable Question (source) |
| 2020-01-28 21:21:55 -0500 | received badge | ● Popular Question (source) |
| 2019-12-13 09:10:33 -0500 | commented answer | how to visualize pcd file.?? thanks Felix! |
| 2019-12-13 05:08:13 -0500 | edited question | cannot run octomap simple_example.cpp cannot run octomap simple_example.cpp Hi guys, I am trying to run use the octomap library and wanted to run the simple_ |
| 2019-12-12 11:53:34 -0500 | received badge | ● Editor (source) |
| 2019-12-12 11:53:34 -0500 | edited question | cannot run octomap simple_example.cpp cannot run octomap simple_example.cpp Hi guys, I am trying to run use the octomap library and wanted to run the simple_ |
| 2019-12-12 11:32:48 -0500 | received badge | ● Enthusiast |
| 2019-12-11 11:39:34 -0500 | commented answer | no timestamps when publishing for fixed joints robot_state_publisher yes, set use_sim_time to true in your launch file when launching gazebo and it should solve your problem. <arg name= |
| 2019-12-11 11:34:44 -0500 | asked a question | cannot run octomap simple_example.cpp cannot run octomap simple_example.cpp Hi guys, I am trying to run use the octomap library and wanted to run the simple_ |
| 2019-12-11 11:30:38 -0500 | asked a question | cannot run octomap simple_example.cpp cannot run octomap simple_example.cpp Hi guys, I am trying to run use the octomap library and wanted to run the simple_ |
| 2019-11-29 07:44:19 -0500 | received badge | ● Popular Question (source) |
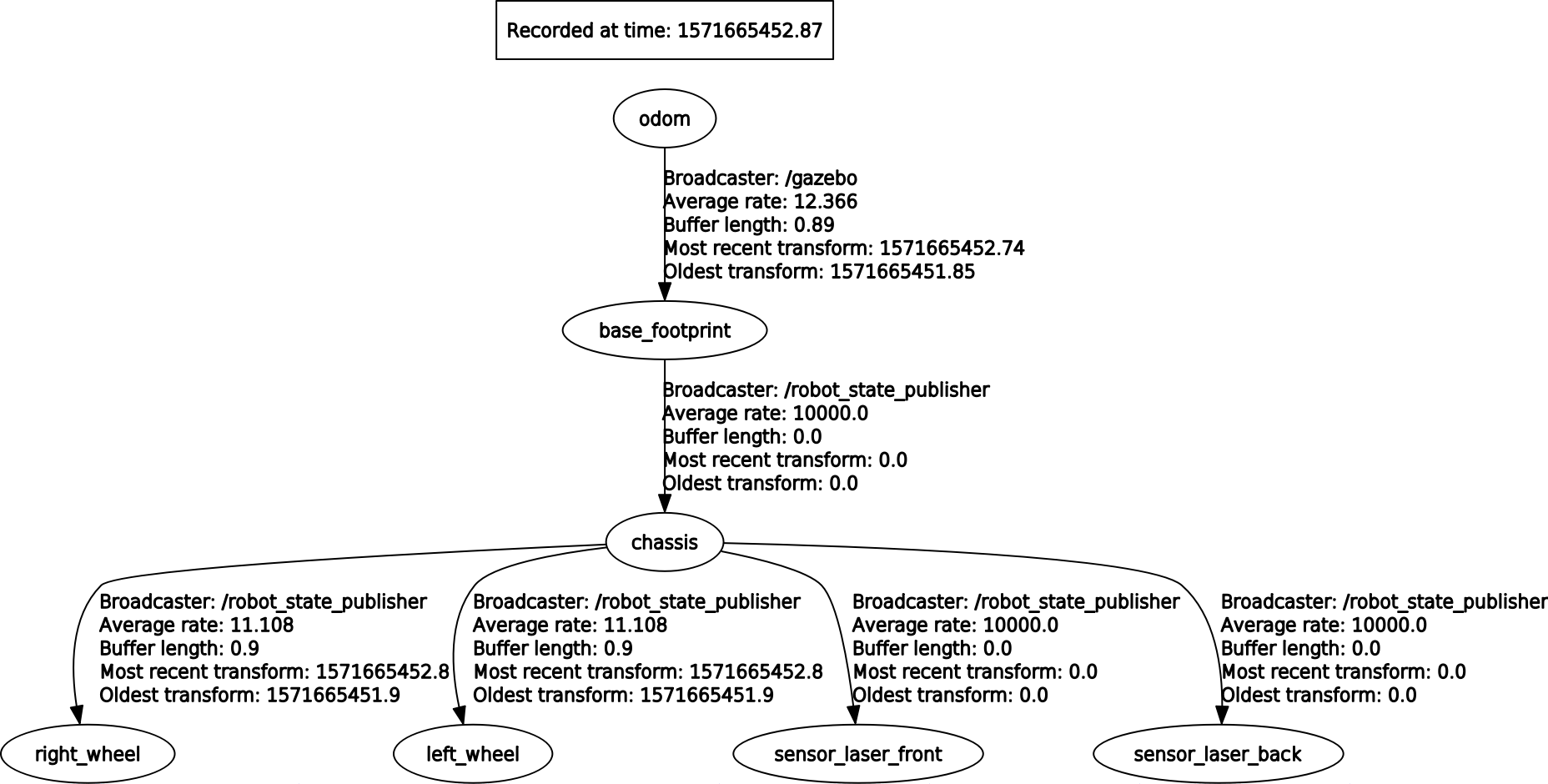
| 2019-10-25 03:37:12 -0500 | marked best answer | no timestamps when publishing for fixed joints robot_state_publisher Hi guys, I have the following problem: I wrote a launch file which launches my differential drive robot with 2 lidar sensors in gazebo and rviz. The odometry for my robot comes from the differential drive plugin and the transforms for my robot come from the nodes "robot_sate_publisher" and "joint_state_publisher". I have 3 fixed joints "base_link" to "chassis" and "chassis" to each of the lidars and 2 continuous joints "chassis" to "wheel" for each wheel. Now when I look at the rqt_tree I see that the transforms for all the fixed joints, there is no time_stamp for the transforms and also I cannot choose to see the Pointcloud data in the odom frame since rviz tells me that the message was removed, because it is too old. My question: do I have to code now a separate node which broadcasts all these transforms with a time stamp? I thought that the robot_state_publisher and joint_state_publisher nodes that I launch in the launch-file are exactly for that: to publish all the transforms (whole transform tree) of my robot. But I only get stamped messages for the chassis to wheel tranforms and odom to base_footprint transforms but not for the fixed joints. (I already tried with static_transform nodes to publish static transforms, but still no timestamp) Launch File: Thank you very much in advance! |
| 2019-10-25 03:23:34 -0500 | commented answer | no timestamps when publishing for fixed joints robot_state_publisher cool, thank you! |
| 2019-10-25 03:23:20 -0500 | edited question | no timestamps when publishing for fixed joints robot_state_publisher no timestamps when publishing for fixed joints robot_state_publisher Hi guys, I have the following problem: I wrote a l |
| 2019-10-25 03:14:50 -0500 | answered a question | no timestamps when publishing for fixed joints robot_state_publisher so it seems to be normal to not get any timestamps when publishing fixed joint transforms via robot_state_publisher as c |
| 2019-10-25 02:38:16 -0500 | commented question | What is the problem with my odom fixed frame I have the exact same problem...were you able to solve it? Thank you in advance. |
| 2019-10-21 09:06:17 -0500 | asked a question | no timestamps when publishing for fixed joints robot_state_publisher no timestamps when publishing for fixed joints robot_state_publisher Hi guys, I have the following problem: I wrote a l |
| 2019-10-17 07:10:11 -0500 | commented answer | joint state publisher dies, cannot attach wheels with continuous joint thank soo much! |
| 2019-10-17 07:08:45 -0500 | received badge | ● Supporter (source) |
| 2019-10-17 07:08:43 -0500 | marked best answer | joint state publisher dies, cannot attach wheels with continuous joint Hi, I am currently trying to create a simple differential drive robot model with 2 wheels and 2 caster wheels, but I cannot attach the wheels to the chassis with continuous/revolute joints and I do not get the transforms of course, but I can connect them with fixed joints and I also get the correct transforms with the fixed joints. I am using ros melodic with Ubuntu 18.04.3 LTS on VM 6.0.12
Here is the error message I get: Error Message URDF file |
| 2019-10-17 07:08:43 -0500 | received badge | ● Scholar (source) |
| 2019-10-17 04:35:56 -0500 | asked a question | joint state publisher dies, cannot attach wheels with continuous joint joint state publisher dies, cannot attach wheels with continuous joint Hi, I am currently trying to create a simple dif |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.