The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-02-26 06:42:55 -0500 | received badge | ● Famous Question (source) |
| 2019-11-08 10:31:57 -0500 | received badge | ● Notable Question (source) |
| 2019-10-09 18:12:04 -0500 | received badge | ● Enthusiast |
| 2019-09-26 20:19:43 -0500 | received badge | ● Popular Question (source) |
| 2019-09-26 14:29:35 -0500 | commented answer | Why does NavFn return a path that doesn't start from the robot location? Oh, I see. I ended up switching to global planner and that solved the problem. Thank you for your help! |
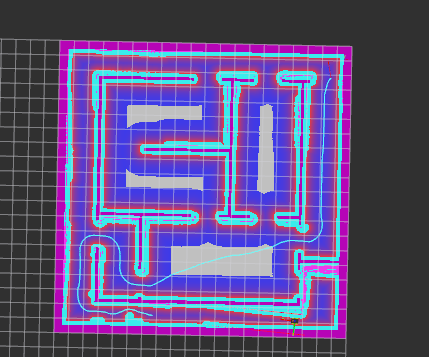
| 2019-09-26 14:29:01 -0500 | marked best answer | Why does NavFn return a path that doesn't start from the robot location? The path is the cyan line, and the robot is in the lower right corner. As you can see, the path doesn't start from where the robot is, resulting in move_base aborting the goal. The map isn't that big (1000x1000 px at 0.02 m/px) or complicated. Is there a limit to the path length that navfn returns?
The move_base package version is 1.14.4, on kinetic. I'm using the navigation stack configuration that comes with the jackal_navigation package (0.6.3): https://github.com/jackal/jackal/tree... Platform: Ubuntu 16.0 (64-bit) I modified a few parameters in the AMCL launch file for localization, but I don't think that is relevant here. Here are my common (both global and local) costmap parameters: |
| 2019-09-26 14:29:01 -0500 | received badge | ● Scholar (source) |
| 2019-09-26 14:28:57 -0500 | received badge | ● Supporter (source) |
| 2019-09-26 10:57:44 -0500 | edited question | Why does NavFn return a path that doesn't start from the robot location? Why does NavFn return a path that doesn't start from the robot location? The path is the cyan line, and the robot is in |
| 2019-09-25 16:14:35 -0500 | commented question | Why does NavFn return a path that doesn't start from the robot location? It seems to always happen whenever the path gets too long. If I set a goal close to the robot, there's no problem, but a |
| 2019-09-25 15:05:57 -0500 | received badge | ● Student (source) |
| 2019-09-25 00:26:27 -0500 | asked a question | Why does NavFn return a path that doesn't start from the robot location? Why does NavFn return a path that doesn't start from the robot location? As a new user I can't upload files yet, so the |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.