The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2018-02-13 11:11:33 -0500 | received badge | ● Necromancer (source) |
| 2018-01-23 21:31:50 -0500 | received badge | ● Necromancer (source) |
| 2018-01-23 21:31:50 -0500 | received badge | ● Teacher (source) |
| 2016-10-25 00:25:07 -0500 | received badge | ● Good Question (source) |
| 2016-06-03 02:35:39 -0500 | received badge | ● Favorite Question (source) |
| 2016-01-07 09:18:56 -0500 | received badge | ● Taxonomist |
| 2016-01-03 15:14:27 -0500 | answered a question | How can I control RC car ? I think, it will be easier to connect an Arduino to your Raspberry pi. The arduino get the Information from the pi and will send it to the Servomotors. The same like here: http://answers.ros.org/question/19404... There is also the code to send the Infos to your Arduino. You need to install rosserial on your pi(including the arduino IDE, see tutorial http://wiki.ros.org/rosserial/Tutorials ) and copy the code from the Servo-controller-example for your motors. You need to extend the code for your setup. |
| 2016-01-03 11:31:41 -0500 | received badge | ● Famous Question (source) |
| 2015-12-15 12:50:15 -0500 | received badge | ● Famous Question (source) |
| 2015-12-04 19:37:53 -0500 | received badge | ● Notable Question (source) |
| 2015-11-27 02:46:40 -0500 | commented question | tracking of one marker with multiple cameras (ar_pose_ekf) Hello jep31, do you get any relsult of it? I have the same problem and i am very interested in your work. |
| 2015-11-24 16:31:26 -0500 | answered a question | Error compiling visp_vision Why do you install it by source? If you have Indigo or Jade, you could just install it from the repositories: sudo apt-get install ros-jade-visp |
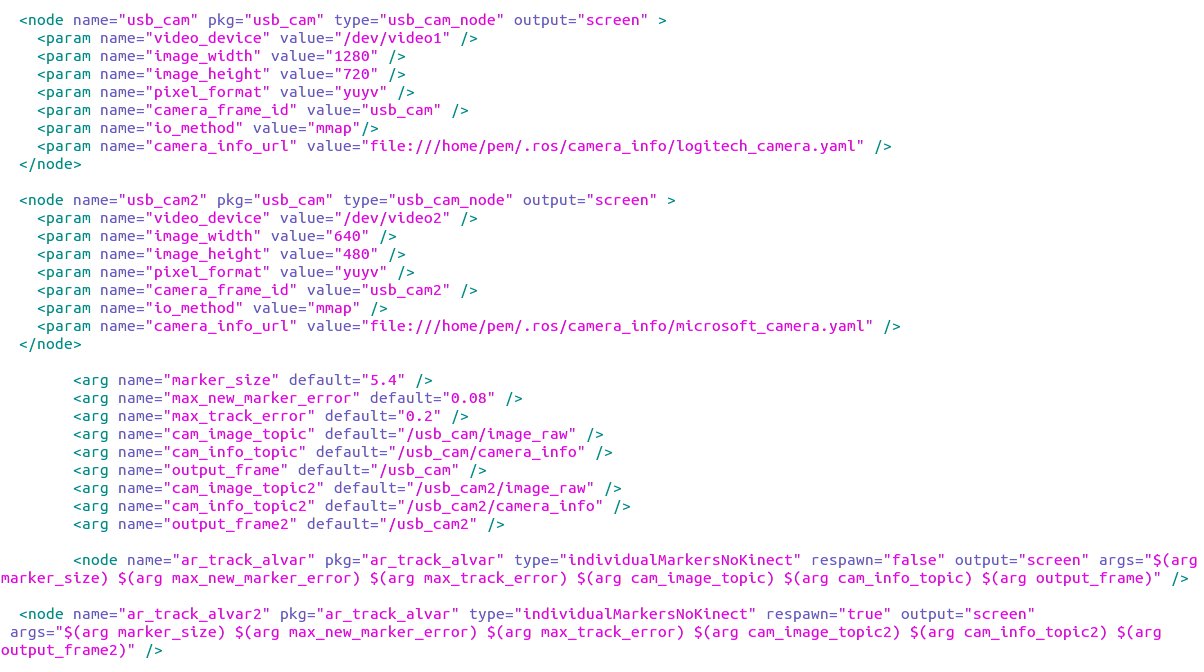
| 2015-11-23 15:02:44 -0500 | answered a question | ar_pose with several cameras like dornhege said, it work for me to remap the driver, the topics from each cam:
But if the cameras detect the same Tag, the pose estamation jump from one camera to the other. Is it possible to get the old packge ar_pose_ekf somewhere? Or have someone a good idea to merge the estimations without long coding? |
| 2015-11-16 05:25:33 -0500 | commented question | Relative tf between two cameras looking at the same AR marker Hello georgebrindeiro, how does your work going? Could you solve your problem at merging the estimation? I am working on the same problem and i`m very interested in your results. Could you please update these article? |
| 2015-11-08 18:54:19 -0500 | received badge | ● Notable Question (source) |
| 2015-11-07 07:17:59 -0500 | commented answer | rtapmap nodes crash on Raspi 2 Thanks for your answer! I tried the installation from the binaries...i get the same error. When i start other nodes like "$ rosrun rtabmap_ros rtabmapviz" i get the message "Segmentation fault (core dumped) (same problem like the guy in your link) |
| 2015-11-06 03:42:50 -0500 | received badge | ● Popular Question (source) |
| 2015-11-05 08:00:03 -0500 | asked a question | rtapmap nodes crash on Raspi 2 Hello ROS-community, I want to start rtabmap on my raspi 2 with ubuntu 14.04 ROS Indigo. I have compiled it from Source at first like the description on github: https://github.com/introlab/rtabmap_ros . It do not worked for me, so i searched for another solution. Someone write, i need to compile it in debug mode. The compilation worked without problems after i set some more swap-space. But when i start eg. I get the same error and all nodes crash. The Standalone version |
| 2015-11-05 07:22:28 -0500 | received badge | ● Supporter (source) |
| 2015-11-05 07:18:32 -0500 | received badge | ● Popular Question (source) |
| 2015-10-27 04:06:11 -0500 | received badge | ● Enthusiast |
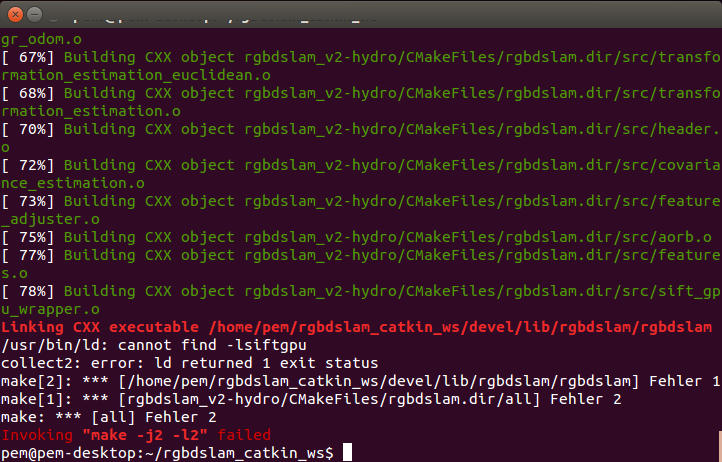
| 2015-10-23 05:08:31 -0500 | asked a question | rgbslamv2 compile error missing cuda.h Hello ROS community, I try to compile the rgbdslamv2 (folowing instruction http://felixendres.github.io/rgbdslam... ). I get the error, that cuda.h is missing. I deactivate the cuda option in the CMakelists.txt, but activate the SiftGpu with GLSL. Also it cant find -lsiftgpu (see picture).
If i deactivate Siftgpu at all in the CMakelists.txt and activate pcl_icp, the compilation complete without errors, but crash when i start any launch file with the error: REQUIRED process [rgbdslam-2] has died! process has died [pid 4120, exit code-11, cmd /home/pem/rgbdslam_catkin_ws/devel/lib/rgbdslam/rgbdslam __name:=rgbdslam __log:=/home/pem/.ros/log/86f0937e-3be5-11e5-8018-c86000307f44/rgbdslam-23.log]. log file: /home/slam/.ros/log/86f0937e-3be5-11e5-8018-c86000307f44/rgbdslam-23*.log Initiating shutdown! I add c++11 to the CMakeLists.txt in rgbdslam( is this right?): SET(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11") and try to change the line: find_package(PCL 1.7 REQUIRED COMPONENTS common io) to find_package(PCL 1.8 REQUIRED COMPONENTS common io) but i get the error, it cant find pcl 1.8. (i see it here: https://github.com/felixendres/rgbdsl... ) what is wrong? Allready solved Problems: Error1: Catkin_make Error "No rule to make target /usr/lib/libcxsparse.so.2.2.3', needed by/home/zarneel/rgbdslam_catkin_ws/devel /lib/rgbdslam/rgbdslam'. Stop" solved it: In Workspace src/rgbdslam_v2/CmakeLists.txt under „set libs“ exchange the code „#SET(LIBS_LINK GL GLU cholmod /usr/lib/libcxsparse.so.2.2.3 ${G2O_LIBRARIES} ${QT_LIBRARIES} ${QT_QTOPENGL_LIBRARY} ${GLUT_LIBRARY} ${OPENGL_LIBRARY} ${OpenCV_LIBS})“ to SET(LIBS_LINK GL GLU cholmod /usr/lib/x86_64-linux-gnu/libcxsparse.so.3.1.2 ${G2O_LIBRARIES} ${QT_LIBRARIES} ${QT_QTOPENGL_LIBRARY} ${GLUT_LIBRARY} ${OPENGL_LIBRARY} ${OpenCV_LIBS}) Error2: opencv2/nonfree/features2d.hpp no such file or directory Update opencv: sudo add-apt-repository --yes ppa:xqms/opencv-nonfree sudo apt-get update sudo apt-get install libopencv-nonfree-dev My Systems runs on Ubuntu 14.04 ROS Indigo |
| 2015-10-20 16:01:48 -0500 | commented answer | Where can i publish a Raspberry pi 2 - Ros indigo ISO image? Big thanks to you, Amrac! You saved me (and others) a lot of work. |
| 2015-10-20 10:01:09 -0500 | commented answer | Where can i publish a Raspberry pi 2 - Ros indigo ISO image? Hello allenh1, Is it possible to get the Image? I try the torrent file, but there are no Peers. |
| 2015-05-28 22:16:04 -0500 | marked best answer | ccny_rgbd with vo+mapping rosservice call error Hello Dryanovski and fellow campaigners, I am using ROS Groovy on an i3 laptop and ATI 6770m. I use your ccny package. Nearly everything works fine. I can start all launch files an see the rgbd screen (Topic: /rgbd/cloud) in rviz. Just one problem: I want to see the whole map in rviz, but it disappears. I think i must call the service rosservice call /publish_keyframes ".*" to publish all keyframes an set the delay time unequal zero. But i get just the error message after the call: ERROR: service [/publish_keyframes] responded with an error: nothing else :( In rviz i can set the topic to "keyframes", but no pointcloud! I tried different detector types and change their params...no effect... Thanks for your help, Regards, rossi |
| 2015-05-19 05:40:34 -0500 | received badge | ● Famous Question (source) |
| 2015-04-29 04:22:30 -0500 | received badge | ● Nice Question (source) |
| 2015-04-29 03:40:22 -0500 | marked best answer | dynamixel wheel_mode hello everybody, i am new in ros and need to control 2 dynamixels (mx28r and mx106r). in the standard_mode the actuators rotate 360°. i read that in the wheel_mode its possible to use the dynamixels as normal motors. i already install the packages, but i cant find any information about it. do anybody know how i can switch the cases. thanks for the help. |
| 2014-01-28 17:31:37 -0500 | marked best answer | [ERROR] Failed to load nodelet hi i try to move my Husky A200 a little bit smoother. Therefor i've installed the yocs_velocity_smoother. But it doesn't start. Nodelet failed to load. I saw that others have nearly the same problems and they only must add a new library through the "CMakeLists.txt" file. But i don't know which library i had to add. My error look like this: thanks for help |
| 2014-01-28 17:31:03 -0500 | marked best answer | combine visual odometry data from ccny_rgbd with encoders/IMU Hello Ros-community, I want to combine the visual odometry from a kinect with IMU and encoder data. I think it must be possible with the EKF-package for a good calculated robot-pose. With the ccny_rgbd i try to make simultaneously a 3D map and use the published vo data for the robot pose. If I use just the vo data, the robot pose jump sometimes when it turns too fast around. Is it possible to combine all information to visualize the current best hypothesis about the robot's pose? Is a scan-matcher maybe the right way? Edit: I try to use the laser_scan_matcher. It could not find the node. I think it doesnt work, because it is just for fuerte available and i installed groovy. But i found a very easy way to combine them: just set in the EKF package visual odometry to TRUE. NOW i get a big Error: Covariance specified for measurement on topic vo is zero I found this: Each measurement that is processed by the robot pose ekf needs to have a covariance associated with it. The diagonal elements of the covariance matrix cannot be zero. This error is shown when one of the diagonal elements is zero. Messages with an invalid covariance will not be used to update the filter. With rostopic echo /vo i get these infos: child_frame_id: '' pose: pose: position: x: 0.0725274412988 y: -0.0736182447672 z: -0.00655200519239 orientation: x: -0.00375973887428 y: -0.00384862482967 z: 0.0079803370668 w: 1.00007968675 covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0] twist: twist: linear: x: 0.0 y: 0.0 z: 0.0 Why is the covariance matrix zero? Is it because vo of ccny_rgbd could t generate the covariances? or is this option not implemented? |
| 2014-01-13 02:24:21 -0500 | received badge | ● Famous Question (source) |
| 2013-09-25 03:56:33 -0500 | received badge | ● Notable Question (source) |
| 2013-09-25 03:56:33 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.