
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-09-06 05:43:53 -0500 | received badge | ● Nice Question (source) |
| 2022-01-07 06:50:43 -0500 | received badge | ● Famous Question (source) |
| 2021-06-03 03:17:20 -0500 | received badge | ● Notable Question (source) |
| 2021-06-03 03:17:20 -0500 | received badge | ● Popular Question (source) |
| 2021-05-26 15:44:32 -0500 | marked best answer | Map is not initialized, with Rviz and Gazebo simulation, ROS2 Hi. I have been following the Turtlebot3 tutorial with ROS2 Dashing (http://emanual.robotis.com/docs/en/pl...) which works fine for all the steps. Now, i want to try out simulation in gazebo and navigation2 with a simple robot i have built on my own. As a starter i have been using the turtlebot files, the only thing i have changed is the design of the robot (inside the model and urdf files). The sensors etc. is kept the same. I also use the map and world for turtlebot3. I want to perform the simulation part in the tutorial. First I run the command: which correctly visualize the robot and world in Gazebo. Then I run RviZ opens with the correct map, but a lot of errors occur both in Rviz and in the terminalwindow: When I used the turtlebot model, this errors also occurred, but they where removed when I set the initial pose for the robot. Now, when I try to set the initial pose, the command line tells that amcl has received an initial pose and set it: But the errors in rviz are still there and the command window keeps printing the same errors as before. The error in Rviz are Global Status: Error, Fixed Frame:Frame [map] does not exist. I assume it is the transform between the map and gazebo/odom(?) which is missing, but I tought it would be fine when I set the initial pose for the robot. Does anyone have any suggestions to what could be the problem? |
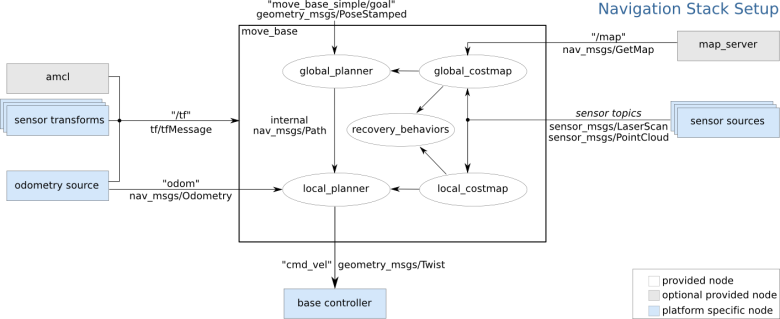
| 2021-05-21 15:56:28 -0500 | marked best answer | Architecture of the Navigaton2 stack Hi, I am working on a report in school where i am describing the navigation2 stack briefly, and i would like to add a picture of the high-level architecture. This picture would been perfect, except the fact that i am writing about ros2 and navigation2.
I have not been able to find an updated picture of the architecture (does anyone know if it exist?), but i found this one:
As i have not been able to find a picture, i was thinking to create my own, but i need to be sure about the changes before i do so. Is local planner (now: nav2_dwb_controller) and global planner (nav2_navfn_planner) now moved outside the square box (now: nav2_bt_navigator), and the box consists of only global costmap, local costmap and recovery behaviour? or is the architecture changed completely? I am just briefly explaining the navigation stack and what information is required for this to work, so this is why i have not too much knowledge of how the different components work. Thank you for any answers! :) |
| 2020-11-21 10:32:42 -0500 | received badge | ● Favorite Question (source) |
| 2020-10-22 03:05:12 -0500 | received badge | ● Famous Question (source) |
| 2020-08-22 22:55:31 -0500 | received badge | ● Famous Question (source) |
| 2020-08-05 12:38:19 -0500 | received badge | ● Famous Question (source) |
| 2020-07-15 00:41:57 -0500 | received badge | ● Notable Question (source) |
| 2020-06-23 08:20:36 -0500 | received badge | ● Famous Question (source) |
| 2020-06-12 04:53:26 -0500 | received badge | ● Famous Question (source) |
| 2020-06-08 12:44:14 -0500 | received badge | ● Popular Question (source) |
| 2020-05-11 05:35:23 -0500 | asked a question | Cartographer: map->odom tf is unstable when using both scans and pointcloud as input Cartographer: map->odom tf is unstable when using both scans and pointcloud as input Hi. I am using Cartographer/Car |
| 2020-05-11 03:18:19 -0500 | received badge | ● Famous Question (source) |
| 2020-05-03 10:06:32 -0500 | commented question | Realsense D435 Camera Not Detected Did you figure out how to solve this? Having the same issue! |
| 2020-04-29 03:55:23 -0500 | received badge | ● Notable Question (source) |
| 2020-04-22 04:51:07 -0500 | received badge | ● Notable Question (source) |
| 2020-04-03 07:58:33 -0500 | received badge | ● Notable Question (source) |
| 2020-03-31 04:16:42 -0500 | received badge | ● Notable Question (source) |
| 2020-03-19 05:52:58 -0500 | asked a question | Moveit - create virtual point in the middle of gripper Moveit - create virtual point in the middle of gripper Hi. I am using Moveit2 to plan for my manipulator. Attached to t |
| 2020-03-18 07:10:21 -0500 | received badge | ● Good Question (source) |
| 2020-03-17 04:43:16 -0500 | commented answer | ROS2 Python: Add arguments to callback Thank you, this worked exactly as I wanted! :-) |
| 2020-03-17 04:42:43 -0500 | marked best answer | ROS2 Python: Add arguments to callback Hi. I am using Python and ROS2 and I want to create two action clients: One for opening a gripper and one for closing it. The goal_response_callback is completely similar for both, and the result callback is very similar, it just changes what parameter to set to true/false. Instead of having two goal_callbacks and two result_callbacks, i was hoping to just give in an argument saying if the goal was to open or close the gripper, but i can't seem to find the correct way to use the callback together with an argument. I have tried to just give the argument as normal (self.goal_response_callback("open"), and as a partial function shown in the code below. Nothing seems to work. Anyone who can tell me the best way to do this? Thanks! |
| 2020-03-16 13:23:26 -0500 | received badge | ● Popular Question (source) |
| 2020-03-16 08:05:40 -0500 | asked a question | ROS2 Python: Add arguments to callback ROS2 Python: Add arguments to callback Hi. I am using Python and ROS2 and I want to create two action clients: One for o |
| 2020-02-25 01:46:34 -0500 | received badge | ● Popular Question (source) |
| 2020-02-22 01:27:16 -0500 | received badge | ● Popular Question (source) |
| 2020-02-21 08:53:00 -0500 | received badge | ● Popular Question (source) |
| 2020-02-21 02:44:33 -0500 | marked best answer | Add camera data to obstacle layer or voxel layer in costmap? Hi. I want to use navigation with multiple sensor inputs. I already have two SICK scanners on my robot, and to avoid the issue with only planar scanning, I want to add a RealSense camera as well. I see that the obstacle/voxel layers in the costmaps in Navigation2 have support for this, and I am considering two cases:
Have anyone tested this and can tell me about how the different alternatives would affect the result, or maybe you can point me to some theory about this? Thanks! |
| 2020-02-21 02:44:29 -0500 | commented answer | Add camera data to obstacle layer or voxel layer in costmap? Thank you, I will try that out! :-) |
| 2020-02-21 02:38:00 -0500 | commented question | Transform data too old when converting from odom to map Map to odom is between 16-20 Hz while odom to base footprint is 65-85 Hz. I updated my question with the view_frames ima |
| 2020-02-21 02:37:45 -0500 | commented question | Transform data too old when converting from odom to map Map to odom is between 16-20 Hz while odom to base footprint is 65-85 Hz. I updated my question with the view_frames ima |
| 2020-02-21 02:36:15 -0500 | edited question | Transform data too old when converting from odom to map Transform data too old when converting from odom to map Hi. I am running Navigation2 on Eloquent with my real robot. Thi |
| 2020-02-20 02:18:36 -0500 | asked a question | Transform data too old when converting from odom to map Transform data too old when converting from odom to map Hi. I am running Navigation2 on Eloquent with my real robot. Thi |
| 2020-02-20 01:44:01 -0500 | asked a question | Add camera data to obstacle layer or voxel layer in costmap? Add camera data to obstacle layer or voxel layer in costmap? Hi. I want to use navigation with multiple sensor inputs. |
| 2020-02-17 01:29:43 -0500 | commented answer | Configuring the progress checker in Navigation2 Thank you very much! I do not think it will be necessary for me to change it during runtime, but I will let you know if |
| 2020-02-17 01:27:37 -0500 | marked best answer | Configuring the progress checker in Navigation2 Hi. I am testing out how to dynamically change my speed parameters in Navigation2. It works good, but if I set the speed too low, the navigation fails because the controller server "fails to make progress". In this documentation: https://navigation.ros.org/configurat...
the parameter
I want to change this parameter but I can't seem to find the correct place to do it (without directly changing the code). When I look at the param list in the terminal it is not mentioned any place, and if I try to change it from the terminal, it says that the parameter is not declared. The parameter is used in this code: https://github.com/ros-planning/navig... Does anyone know how I could access and change this parameter? Thanks! |
| 2020-02-13 03:46:01 -0500 | asked a question | Configuring the progress checker in Navigation2 Configuring the progress checker in Navigation2 Hi. I am testing out how to dynamically change my speed parameters in N |
| 2020-02-10 04:21:25 -0500 | received badge | ● Nice Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
 on this page:
on this page: