The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-04-03 08:35:43 -0500 | answered a question | How to move a model in Gazebo11 from ROS2 libgazebo_ros_state.so is a libraray that needs to be attached to a xacro/urdf/sdf model. See the following link where |
| 2023-04-03 08:19:04 -0500 | received badge | ● Critic (source) |
| 2023-03-29 09:38:27 -0500 | commented answer | trying to install Ros2 on Ubuntu 20.04, but it doesn't work Did you substitue "jammy" with "foxy"? Thats wrong. Just follow the tutorial step by step |
| 2023-03-29 05:08:36 -0500 | answered a question | trying to install Ros2 on Ubuntu 20.04, but it doesn't work jammy indicates that you are trying to install the ROS 2 version for Ubuntu 22.04 (Jammy Jellifish). Seems like you clic |
| 2023-03-29 05:08:36 -0500 | received badge | ● Rapid Responder (source) |
| 2023-03-23 11:33:32 -0500 | answered a question | colcon build doesn't generate executables You need to install the required targets. For more about this see this link: https://docs.ros.org/en/foxy/Tutorials/Begi |
| 2023-03-07 10:17:58 -0500 | answered a question | How to make a URDF from CAD? As far as I know this is the only method at the moment: http://wiki.ros.org/sw_urdf_exporter |
| 2023-03-07 10:17:58 -0500 | received badge | ● Rapid Responder (source) |
| 2023-03-05 11:41:03 -0500 | commented answer | RVIZ2 not displaying visuals In the case above I needed to change the topic on which to listen for the urdf file. However, on my current simulation I |
| 2023-03-04 10:11:02 -0500 | received badge | ● Self-Learner (source) |
| 2023-03-04 10:03:46 -0500 | received badge | ● Notable Question (source) |
| 2023-03-04 10:03:46 -0500 | received badge | ● Famous Question (source) |
| 2023-02-20 06:30:06 -0500 | received badge | ● Rapid Responder (source) |
| 2023-02-20 06:30:06 -0500 | answered a question | ros2 foxy pcl/conversions.h not found You need to also link it against pcl_conversions. find_package(pcl_conversions REQUIRED) ament_target_dependencies(node |
| 2023-02-14 07:04:19 -0500 | received badge | ● Famous Question (source) |
| 2023-02-14 07:04:19 -0500 | received badge | ● Notable Question (source) |
| 2023-01-29 13:27:33 -0500 | answered a question | How to run ROS across docker containers? This should help you out: https://answers.ros.org/question/401382/docker-containers-with-ros2-are-unable-to-communicate/ |
| 2023-01-29 13:26:08 -0500 | commented answer | I am unable to colcon build the ros2 workspace and getting these errors. if somebody please help me with this.... Port it to ROS2 if you inted to use ROS2: http://docs.ros.org/en/humble/p/rclcpp/ |
| 2023-01-19 05:36:58 -0500 | commented question | I am unable to colcon build the ros2 workspace and getting these errors. if somebody please help me with this.... ROS2 does not use #include <ros ros.h> your code is probabbly only ROS1 compatible |
| 2023-01-06 14:18:49 -0500 | received badge | ● Popular Question (source) |
| 2022-12-30 10:00:40 -0500 | asked a question | rviz2 screen record not working on Ubuntu 22.04 Wayland rviz2 screen record not working on Ubuntu 22.04 Wayland Hi all, anyone also having troubles recording a screen capture |
| 2022-11-17 09:40:40 -0500 | received badge | ● Necromancer (source) |
| 2022-11-17 06:03:52 -0500 | edited answer | [gmapping.launch] is neither a launch file in package error Source the setup.bash from your terminal or through your bashrc and run rospack profile: echo "source $HOME/catkin_ws/d |
| 2022-11-17 06:03:25 -0500 | answered a question | [gmapping.launch] is neither a launch file in package error Source the setup.bash from your terminal or through your bashrc and run rospack profile: echo "source $HOME/catkin_ws/ |
| 2022-09-22 05:36:55 -0500 | commented question | Opening an image file with ros You don't need ROS for this... Just go with any image processing library e.g. OpenCV: https://docs.opencv.org/4.x/db/deb |
| 2022-09-22 05:34:44 -0500 | commented question | Can't build a package on noetic that worked on melodic you will need to port it to more recent c++ standard |
| 2022-09-22 05:05:02 -0500 | commented question | How to Fix drift in AMCL Did you try to modify the odom_alphaX values during runtime with dynamic_reconfigure? Maybe also change the laser_model_ |
| 2022-09-22 00:15:06 -0500 | asked a question | Overlay depth from LiDAR onto RGB data Overlay depth from LiDAR onto RGB data Hi, I am using ROS1 noetic and YOLO V3 (darknet_ros) to classify objects in the |
| 2022-09-21 09:36:47 -0500 | received badge | ● Nice Answer (source) |
| 2022-09-21 05:16:15 -0500 | answered a question | Remote PC cannot connect to ROS Master Make sure to do export all ROS network variables (ROS_MASTER_URI, ROS_IP, ROS_HOSTNAME) You can put something similar i |
| 2022-09-21 03:40:17 -0500 | answered a question | Pycharm 'No module named rospy' It will also work to start pycharm from a terminal where ROS is already sourced |
| 2022-07-04 05:07:02 -0500 | answered a question | ros2 argument in lauch.py You can still write launch files using XML syntax: https://design.ros2.org/articles/roslaunch_xml.html, https://docs.ros |
| 2022-06-21 08:16:00 -0500 | commented question | rosluanch error "process has died". retagged it to ROS1 since you are using noetic rospy.spin() should also be in your main() [have the same intend as the |
| 2022-06-21 08:13:58 -0500 | commented question | rosluanch error "process has died". retagged it to ROS1 since you are using noetic |
| 2022-06-21 08:13:40 -0500 | received badge | ● Organizer (source) |
| 2022-06-20 12:46:03 -0500 | received badge | ● Nice Answer (source) |
| 2022-06-14 13:05:26 -0500 | received badge | ● Popular Question (source) |
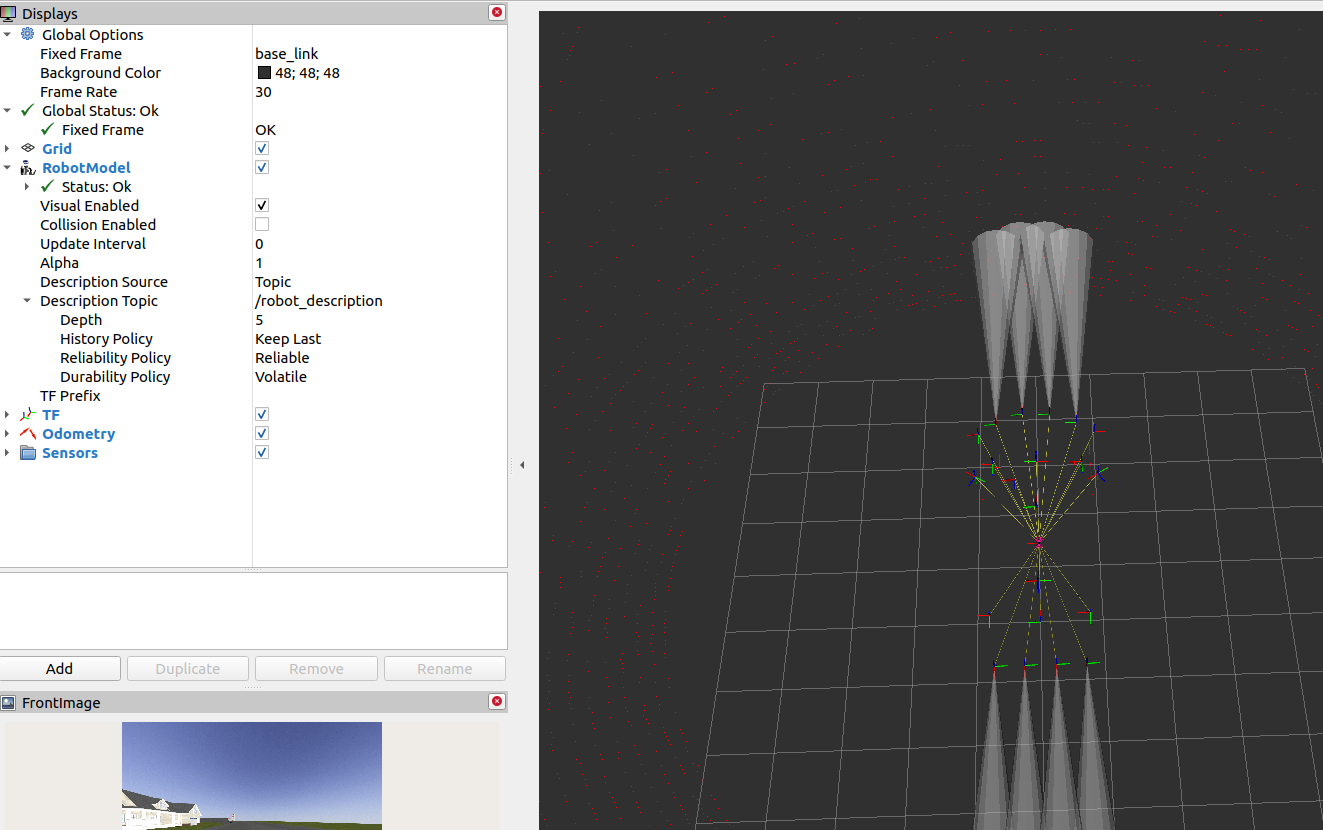
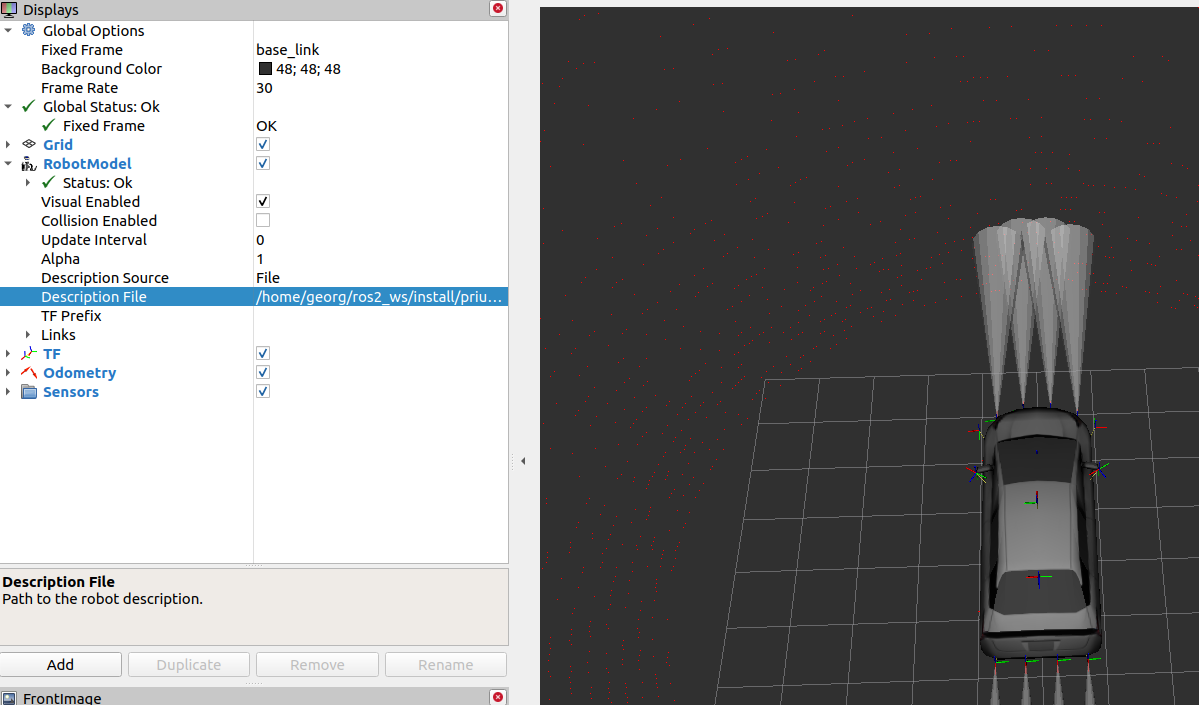
| 2022-06-13 12:22:52 -0500 | marked best answer | RVIZ2 not displaying visuals I just started learning ROS2 by porting the osrf prius simulation to ROS2 and here i ran into the problem that rviz2 is not displaying the visuals (as seen in the figure)
However when I change the Any idea how to solve this? Edit: I am loading the urdf as follows: |
| 2022-06-13 12:22:46 -0500 | answered a question | RVIZ2 not displaying visuals Just after editing my question I realized I am using a namespace on the robot_state_publisher. Thus I needed to change t |
| 2022-06-13 12:22:46 -0500 | received badge | ● Rapid Responder (source) |
| 2022-06-13 12:19:55 -0500 | edited question | RVIZ2 not displaying visuals RVIZ2 not displaying visuals I just started learning ROS2 by porting the osrf prius simulation to ROS2 and here i ran in |
| 2022-06-13 12:16:52 -0500 | asked a question | RVIZ2 not displaying visuals RVIZ2 not displaying visuals I just started learning ROS2 by porting the osrf prius simulation to ROS2 and here i ran in |
| 2022-06-13 12:04:03 -0500 | answered a question | Recording Large Rosbags of Lidar & Camera Data We are recording our sensor data (3 x 3D LiDAR, 3 x 2k rgb camera, IMU, GPS) in the following way and not running into a |
| 2022-02-14 02:31:31 -0500 | commented question | Any resources for creating openai gym environment If you find anything please share |
| 2021-12-27 01:55:08 -0500 | commented answer | How to launch two turtlebots on one ROS master This needs to be done in the launchfiles of each robot |
| 2021-12-27 01:54:02 -0500 | commented answer | question on Converting between ROS images and OpenCV images (C++) Hi, you probably have errors in your c++ files. |
| 2021-12-08 10:06:48 -0500 | received badge | ● Necromancer (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.