The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-09-21 08:42:41 -0500 | received badge | ● Famous Question (source) |
| 2023-06-29 10:49:22 -0500 | received badge | ● Popular Question (source) |
| 2023-06-29 10:49:22 -0500 | received badge | ● Famous Question (source) |
| 2023-06-29 10:49:22 -0500 | received badge | ● Notable Question (source) |
| 2023-06-16 11:47:39 -0500 | commented question | Failed to receive current joint state I am doing MP in simulation. Also, setting use_sim_time=true. Not using multiple machines but running in Virtual box. |
| 2023-06-15 13:45:27 -0500 | edited question | Failed to receive current joint state Failed to receive current joint state Hi, I am working on the motion planning of a 6 DOF robotic arm using ROS (noetic) |
| 2023-06-15 13:43:07 -0500 | asked a question | Failed to receive current joint state Failed to receive current joint state Hi, I am working on the motion planning of a 6 DOF robotic arm using ROS (noetic) |
| 2023-06-15 12:05:30 -0500 | edited question | Controller failed with error code PATH_TOLERANCE_VIOLATED. Controller failed with error code PATH_TOLERANCE_VIOLATED. Hey, I hope you guys are doing well! I am trying to move my r |
| 2023-06-05 05:16:13 -0500 | received badge | ● Notable Question (source) |
| 2023-05-18 22:14:15 -0500 | received badge | ● Notable Question (source) |
| 2023-05-18 09:45:05 -0500 | received badge | ● Popular Question (source) |
| 2023-05-18 08:20:58 -0500 | edited answer | Wrong Pointcloud Orientation in Rviz Modifications made to correctly orient the Point cloud data: <1> Change link name from link to camera_link in abo |
| 2023-05-18 07:43:58 -0500 | answered a question | Wrong Pointcloud Orientation in Rviz Correction made to correctly orient the Point cloud data: <1> Modify link name from link to camera_link in above |
| 2023-05-18 07:43:58 -0500 | received badge | ● Rapid Responder (source) |
| 2023-05-18 07:27:55 -0500 | received badge | ● Popular Question (source) |
| 2023-05-18 07:27:55 -0500 | received badge | ● Notable Question (source) |
| 2023-05-18 07:27:55 -0500 | received badge | ● Famous Question (source) |
| 2023-05-18 05:57:30 -0500 | commented answer | Wrong Pointcloud Orientation in Rviz Thanks for the help. |
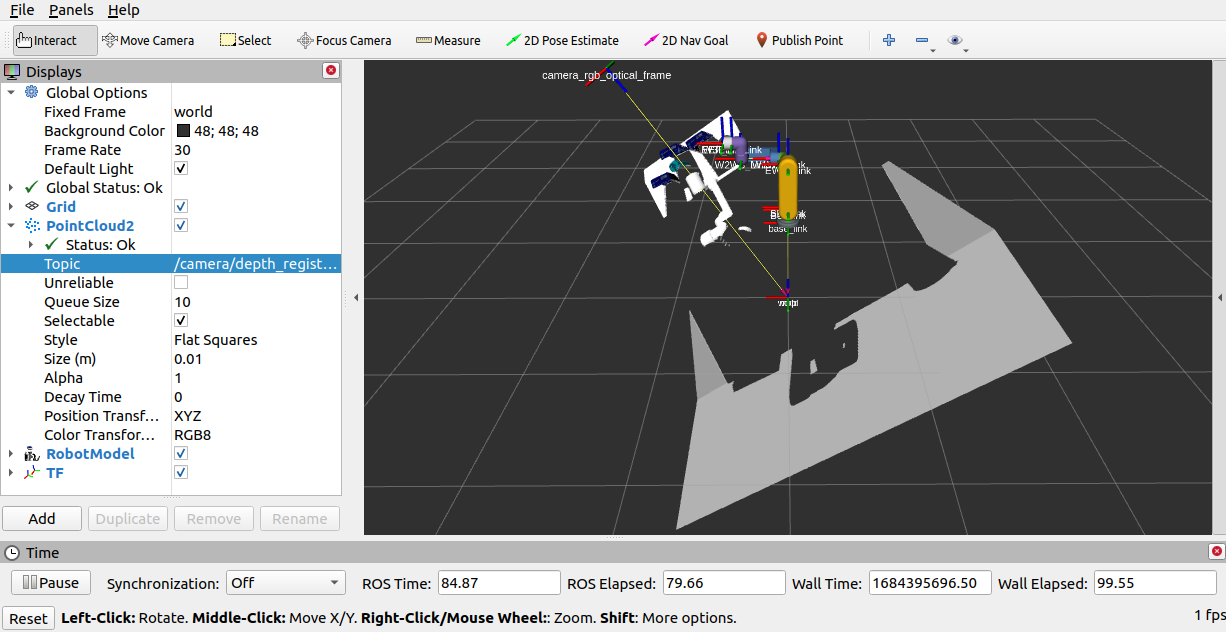
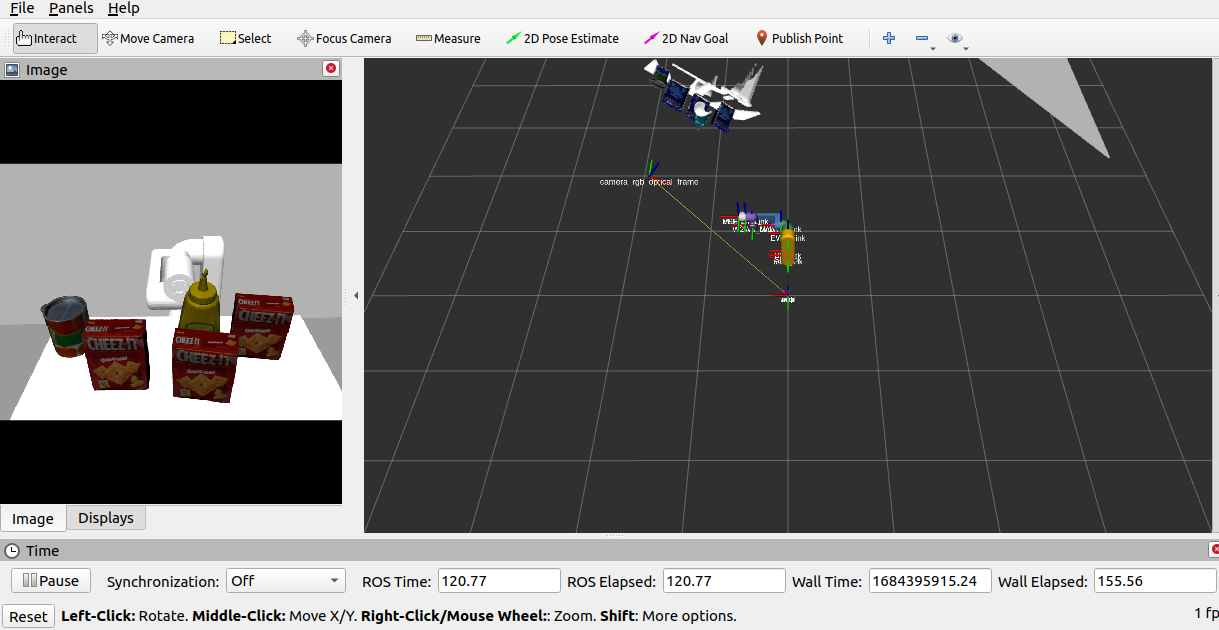
| 2023-05-18 05:57:02 -0500 | marked best answer | Wrong Pointcloud Orientation in Rviz Hey, I am trying to correctly orient the pointcloud data coming from a Kinect 3D camera sensor Gazebo model into the Rviz, but it's not working. In Gazebo, a Pose is of the form: But, input to the static_transform_publisher node is of the form: I tried both the forms, but the pointcloud orientation is still incorrect. I have attached the output of both the versions below. Kinect's Gazebo model World to camera_rgb_optical_frame transform using TF
I would really appreciate some help/guidance on this issue. |
| 2023-05-18 05:57:00 -0500 | commented answer | Wrong Pointcloud Orientation in Rviz Thanks for the help, this definitely helped me. |
| 2023-05-18 03:13:36 -0500 | received badge | ● Organizer (source) |
| 2023-05-18 03:11:59 -0500 | asked a question | Wrong Pointcloud Orientation in Rviz Wrong Pointcloud Orientation in Rviz Hey, I am trying to correctly orient the pointcloud data coming from a Kinect 3D ca |
| 2023-05-04 09:36:03 -0500 | commented question | How to publish point cloud in Rviz? Just go through this link and try to install ros wrappers for intel realsense 3d camera. In order to use the camera with |
| 2023-05-04 09:27:38 -0500 | commented question | How to publish point cloud in Rviz? Just go through this link and try to install ros wrappers for intel realsense 3d camera. In order to use the camera with |
| 2023-05-04 08:31:07 -0500 | received badge | ● Popular Question (source) |
| 2023-05-03 15:44:17 -0500 | commented question | How to publish point cloud in Rviz? Are you doing simulation or real robot ? Is the camera attached on robot or fixed outside the body of robot ? Which 3D c |
| 2023-05-03 15:43:48 -0500 | commented question | How to publish point cloud in Rviz? Are you doing simulation or real robot ? Is the camera attached on robot or fixed outside the body of robot ? Which 3D c |
| 2023-05-03 15:41:56 -0500 | commented question | How to publish point cloud in Rviz? Are you doing simulation or real robot ? |
| 2023-05-03 15:33:00 -0500 | edited question | Rviz is crashing on changing global fixed frame Rviz is crashing on changing global fixed frame Hey, I hope you all are doing well. I am trying to run the demo.launch |
| 2023-05-03 13:01:57 -0500 | edited question | Rviz is crashing on changing global fixed frame Rviz is crashing on changing global fixed frame Hey, I hope you all are doing well. I am trying to run the demo.launch |
| 2023-05-03 13:01:32 -0500 | edited question | Rviz is crashing on changing global fixed frame Rviz is crashing on changing global fixed frame Hey, I hope you all are doing well. I am trying to run the demo.launch |
| 2023-05-03 12:58:13 -0500 | edited question | Rviz is crashing on changing global fixed frame Rviz is crashing on changing global fixed frame Hey, I hope you all are doing well. I am trying to run the demo.launch |
| 2023-05-03 10:30:15 -0500 | edited question | Rviz is crashing on changing global fixed frame Rviz is crashing on changing global fixed frame Hey, I hope you all are doing well. I am trying to run the demo.launch |
| 2023-05-03 10:24:12 -0500 | asked a question | Rviz is crashing on changing global fixed frame Rviz is crashing on changing global fixed frame Hey, I hope you all are doing well. I am trying to run the demo.launch |
| 2023-05-03 10:18:22 -0500 | received badge | ● Famous Question (source) |
| 2023-05-03 10:18:22 -0500 | received badge | ● Notable Question (source) |
| 2023-04-10 03:25:38 -0500 | commented answer | process has died [pid 61815, exit code -11, cmd 'gzserver ~/../worlds/empty.world -slibgazebo_ros_init.so -slibgazebo_ros_factory.so -slibgazebo_ros_force_system.so Thanks for replying. I am trying your suggestions, will update you on that. |
| 2023-04-09 13:51:11 -0500 | commented question | How to do simple pick motion with robot arm and 3d Camera? https://www.ros.org/reps/rep-0103.html |
| 2023-04-09 08:41:00 -0500 | commented question | How to do simple pick motion with robot arm and 3d Camera? yes something like this, although in your case since you are getting only x,y,z values, so your quat woud be 0,0,0,1 |
| 2023-04-09 05:28:47 -0500 | received badge | ● Autobiographer |
| 2023-04-09 05:13:40 -0500 | commented question | How to do simple pick motion with robot arm and 3d Camera? For the last part you can use YOLO to get the centroid of the detected object and using that (x,y) get the z from the ca |
| 2023-04-09 05:05:54 -0500 | commented question | How to do simple pick motion with robot arm and 3d Camera? for the first part, once go through this link. When you are opening 3D camera using ROS then check the camera topic usi |
| 2023-04-09 05:05:12 -0500 | commented question | How to do simple pick motion with robot arm and 3d Camera? for the first part, once go through this link. When you are opening 3D camera using ROS then check the camera topic usi |
| 2023-04-09 05:03:54 -0500 | commented question | How to do simple pick motion with robot arm and 3d Camera? for the first part, once go through this link. When you are opening 3D camera using ROS then check the camera topic usi |
| 2023-04-09 05:02:51 -0500 | commented question | How to do simple pick motion with robot arm and 3d Camera? for the first part, once go through this link. When you are opening 3D camera using ROS then check the camera topic usi |
| 2023-04-09 05:02:28 -0500 | commented question | How to do simple pick motion with robot arm and 3d Camera? for the first part, once go through this link. When you are opening 3D camera using ROS then check the camera topic us |
| 2023-04-08 15:01:48 -0500 | commented question | How to do simple pick motion with robot arm and 3d Camera? Also as far as getting the object's x,y,z is concerned use some computer vision algorithm to detect the centroid of the |
| 2023-04-08 15:01:36 -0500 | commented question | How to do simple pick motion with robot arm and 3d Camera? Also as far as getting the object's x,y,z is concerned used some computer vision algorithm to detect the centroid of th |
| 2023-04-08 14:57:00 -0500 | commented question | How to do simple pick motion with robot arm and 3d Camera? The camera must be publishing data with respect to a camera related frame of reference like camera_link. You don't need |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.