The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-11-14 12:31:06 -0500 | received badge | ● Famous Question (source) |
| 2022-06-27 03:22:00 -0500 | received badge | ● Good Question (source) |
| 2021-02-11 05:24:12 -0500 | received badge | ● Famous Question (source) |
| 2020-12-16 19:41:23 -0500 | received badge | ● Nice Question (source) |
| 2020-12-10 15:42:52 -0500 | received badge | ● Famous Question (source) |
| 2020-10-27 22:27:30 -0500 | received badge | ● Student (source) |
| 2020-10-20 02:02:33 -0500 | received badge | ● Notable Question (source) |
| 2020-08-15 13:08:24 -0500 | received badge | ● Famous Question (source) |
| 2020-08-15 13:08:24 -0500 | received badge | ● Notable Question (source) |
| 2020-07-29 10:37:54 -0500 | marked best answer | Multiple Service Calls in ROS2 I have a sensor library that I am using ROS2 services to make function calls to that library. Is there a way to have multiple services in one node or do I need to make a new node for each individual service call? |
| 2020-04-16 09:36:49 -0500 | received badge | ● Famous Question (source) |
| 2020-04-16 09:36:49 -0500 | received badge | ● Notable Question (source) |
| 2020-04-16 07:02:22 -0500 | received badge | ● Popular Question (source) |
| 2020-04-11 18:08:00 -0500 | received badge | ● Notable Question (source) |
| 2020-03-06 10:00:36 -0500 | received badge | ● Popular Question (source) |
| 2020-02-26 19:22:53 -0500 | received badge | ● Famous Question (source) |
| 2020-02-12 05:45:49 -0500 | received badge | ● Popular Question (source) |
| 2020-02-07 09:19:38 -0500 | received badge | ● Famous Question (source) |
| 2020-01-24 04:38:01 -0500 | received badge | ● Notable Question (source) |
| 2020-01-22 20:50:22 -0500 | received badge | ● Famous Question (source) |
| 2020-01-22 20:50:22 -0500 | received badge | ● Notable Question (source) |
| 2020-01-13 12:23:15 -0500 | commented question | Absolute and Relative paths Apologies. Here is the CMake file. cmake_minimum_required(VERSION 3.14) project(ros2_msgs) SET(ENV{PYTHONPATH} "/opt/r |
| 2020-01-13 11:42:58 -0500 | asked a question | Absolute and Relative paths Absolute and Relative paths I get the following error when trying to generate ros2 interfaces. [build] CMake Error at / |
| 2020-01-10 10:12:34 -0500 | received badge | ● Popular Question (source) |
| 2020-01-09 11:57:38 -0500 | asked a question | rmw_implementation not available at this time rmw_implementation not available at this time I am running into the following CMake Error: [cmake] Found rosidl_default |
| 2019-12-26 19:22:51 -0500 | received badge | ● Famous Question (source) |
| 2019-12-16 16:13:59 -0500 | commented question | ROS2 services not using ament_cmake Setting the CMAKE_PREFIX_PATH resolved the previous issue, but I am getting another issue now. [cmake] Found PythonInte |
| 2019-12-16 16:13:46 -0500 | commented question | ROS2 services not using ament_cmake Setting the CMAKE_PREFIX_PATH resolved the previous issue, but I am getting another issue now. [cmake] Found PythonInte |
| 2019-12-16 16:12:41 -0500 | commented question | ROS2 services not using ament_cmake Setting the CMAKE_PREFIX_PATH resolved the previous issue, but I am getting another issue now. [cmake] Found Python |
| 2019-12-16 10:30:50 -0500 | received badge | ● Popular Question (source) |
| 2019-12-16 08:18:32 -0500 | commented question | ROS2 services not using ament_cmake How would I do that? Do I just point it to /opt/ros/dashing (I am using dashing as my distro) |
| 2019-12-13 14:47:04 -0500 | commented question | ROS2 services not using ament_cmake I am not using colon as my build tool in my application. I am using cmake for everything and have been manually linking |
| 2019-12-13 14:20:14 -0500 | asked a question | ROS2 services not using ament_cmake ROS2 services not using ament_cmake I am not using ament_cmake and I am having trouble incorporating the .srv files to t |
| 2019-10-16 19:36:30 -0500 | received badge | ● Notable Question (source) |
| 2019-09-22 20:41:55 -0500 | received badge | ● Popular Question (source) |
| 2019-09-10 20:23:35 -0500 | received badge | ● Notable Question (source) |
| 2019-08-28 21:34:44 -0500 | received badge | ● Popular Question (source) |
| 2019-08-28 10:54:12 -0500 | asked a question | ROS2 Services: stuck on spin_until_future_complete ROS2 Services: stuck on spin_until_future_complete I have a client node that is sending a request to a server node. I fo |
| 2019-08-27 14:04:13 -0500 | received badge | ● Enthusiast |
| 2019-08-14 06:26:56 -0500 | received badge | ● Popular Question (source) |
| 2019-08-07 09:04:40 -0500 | received badge | ● Popular Question (source) |
| 2019-08-06 14:06:15 -0500 | asked a question | Error: expected primary-expression Error: expected primary-expression I am using the executors in rclcpp, but I keep on getting the following error: erro |
| 2019-08-06 12:31:57 -0500 | asked a question | ROS2 workspace clean ROS2 workspace clean What is the equivalent to catkin clean for ROS2 and colcon? |
| 2019-08-05 11:35:49 -0500 | commented answer | Send Request Funcion This was how I defined it before: rclcpp::Client<orion_sensor::srv::SetFocus>::SharedPtr client |
| 2019-08-05 11:35:30 -0500 | commented answer | Send Request Funcion This was how I defined it before: 'rclcpp::Client<orion_sensor::srv::setfocus>::SharedPtr client' |
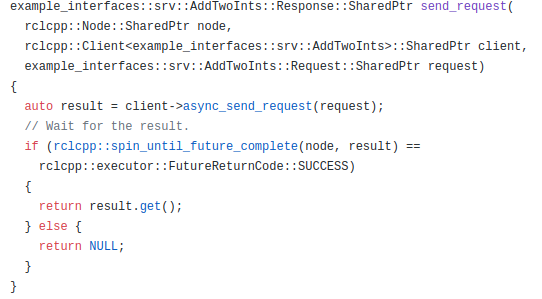
| 2019-08-05 11:35:03 -0500 | marked best answer | Send Request Funcion The add_two_ints_client.cpp file in the ros2/demos repository has the following send request function.
Is there a way to make this send request function generic for other services I have created? |
| 2019-08-05 11:35:03 -0500 | commented answer | Send Request Funcion This was how I defined it before: rclcpp::Client<orion_sensor::srv::setfocus>::SharedPtr client |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.