The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-11-24 01:16:33 -0500 | received badge | ● Teacher (source) |
| 2021-11-24 01:16:33 -0500 | received badge | ● Self-Learner (source) |
| 2021-11-24 01:16:33 -0500 | received badge | ● Necromancer (source) |
| 2021-08-20 15:36:31 -0500 | marked best answer | Passing Multiple Arguments to Subscriber Callback function in python Hi All, I am wrote the following code to track position of my robot in rviz using markers. I get a error saying that queue size needs to be Integer. It is because of how rospy class is defined http://docs.ros.org/melodic/api/rospy/html/rospy.topics.Subscriber-class.html The fourth argument is queue size. I need to pass marker and pub_point objects to callback function. Solution: |
| 2021-08-10 16:35:22 -0500 | received badge | ● Student (source) |
| 2021-07-08 14:28:01 -0500 | received badge | ● Famous Question (source) |
| 2021-07-08 14:28:01 -0500 | received badge | ● Popular Question (source) |
| 2021-07-08 14:28:01 -0500 | received badge | ● Notable Question (source) |
| 2020-09-21 07:39:44 -0500 | received badge | ● Famous Question (source) |
| 2020-08-31 14:58:38 -0500 | received badge | ● Famous Question (source) |
| 2020-07-03 12:39:00 -0500 | received badge | ● Notable Question (source) |
| 2020-07-03 05:54:09 -0500 | received badge | ● Notable Question (source) |
| 2020-07-03 05:54:09 -0500 | received badge | ● Famous Question (source) |
| 2020-06-18 04:06:09 -0500 | commented question | RVIZWeb not starting properly I git cloned rvizweb from OSRF page and followed their instructions on "catkin_make install" sourcing the install folder |
| 2020-06-18 03:53:06 -0500 | received badge | ● Popular Question (source) |
| 2020-06-03 07:52:39 -0500 | asked a question | RVIZWeb not starting properly RVIZWeb not starting properly Hi All, I am running ROS Melodic n Ubuntu 18.04 LTS version. I am working RVIZ web to dis |
| 2020-06-01 20:29:26 -0500 | commented question | rosbridge_address not found @gvdhoon edited the question as per your instructions, Please reopen the question |
| 2020-06-01 20:28:15 -0500 | edited question | rosbridge_address not found rosbridge_address not found Hi All, I am running ROS Melodic on Ubuntu 18.04 . I started rosbridge server on local sys |
| 2020-06-01 16:53:13 -0500 | received badge | ● Notable Question (source) |
| 2020-06-01 09:58:24 -0500 | asked a question | rosbridge_address not found rosbridge_address not found Hi All, I am running ROS Melodic on Ubuntu 18.04 . I started rosbridge server on local sys |
| 2020-04-09 12:56:43 -0500 | received badge | ● Famous Question (source) |
| 2020-02-21 22:25:43 -0500 | received badge | ● Famous Question (source) |
| 2020-02-21 22:21:41 -0500 | received badge | ● Famous Question (source) |
| 2020-02-03 02:58:41 -0500 | received badge | ● Famous Question (source) |
| 2020-01-28 07:55:39 -0500 | received badge | ● Popular Question (source) |
| 2020-01-24 09:51:13 -0500 | received badge | ● Famous Question (source) |
| 2020-01-21 20:02:43 -0500 | received badge | ● Popular Question (source) |
| 2020-01-21 20:02:43 -0500 | received badge | ● Notable Question (source) |
| 2020-01-21 03:06:14 -0500 | marked best answer | Tracking Robot position using Marker Hi All, I am using ROS Kinetic on Ubuntu 16.04. I am working on a RVIZ Marker program to track "\AMCL_Pose" parameter and visualize in RVIZ. The code I have written is as follows I get the following result
The issue is that the length and orientation of the line are not proper. The robot has moved over 20 meters but in rviz it showing only 5 meters. How to resolve this issue ? |
| 2020-01-21 03:06:04 -0500 | answered a question | Tracking Robot position using Marker Fixed the issue by removing the sleep time in the publisher. |
| 2020-01-21 03:03:45 -0500 | marked best answer | "Permission denied" when importing tf Hi All, I am using ros kinetic on ubuntu 16.04 xenial. while trying to import tf library in python code I get following error How to resolve this error ? |
| 2020-01-21 01:52:11 -0500 | commented question | How to publish a message to a topic while playing rosbag? The question is unclear as rosbag play <filename> will playback your recorded file. if you then look at the no |
| 2020-01-21 01:51:42 -0500 | commented question | How to publish a message to a topic while playing rosbag? The question is unclear as rosbag play <filename> will playback your recorded file. if you then look at the no |
| 2020-01-21 01:05:32 -0500 | asked a question | "Permission denied" when importing tf tf import error Hi All, I am using ros kinetic on ubuntu 16.04 xenial. while trying to import tf library in python cod |
| 2019-12-10 00:46:20 -0500 | received badge | ● Notable Question (source) |
| 2019-12-10 00:46:20 -0500 | received badge | ● Famous Question (source) |
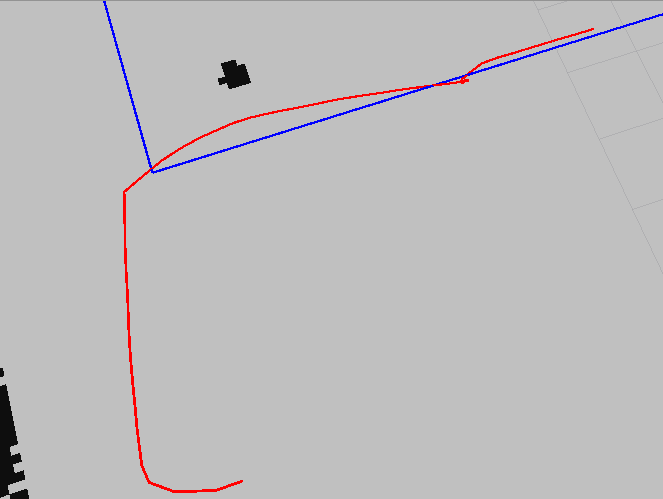
| 2019-12-09 23:14:57 -0500 | answered a question | Wrong Pose update while moving robot slowely in reverse direction using tele-operation @Delb, I am posting a screenshot for my colleague, Please find the screenshot below. |
| 2019-12-04 11:50:24 -0500 | received badge | ● Notable Question (source) |
| 2019-12-04 11:50:24 -0500 | received badge | ● Famous Question (source) |
| 2019-12-04 11:50:24 -0500 | received badge | ● Popular Question (source) |
| 2019-12-02 05:27:55 -0500 | received badge | ● Notable Question (source) |
| 2019-12-02 04:02:18 -0500 | asked a question | Map Matching with Laser Scan and Static Map Map Matching with Laser Scan and Static Map Hi All, I working on a Localization and Navigation problem by writing my ow |
| 2019-11-22 01:03:34 -0500 | received badge | ● Famous Question (source) |
| 2019-11-09 00:56:49 -0500 | received badge | ● Popular Question (source) |
| 2019-11-05 05:08:48 -0500 | commented answer | Bi-Directional Navigation using Move Base for Rosbot I am using move_base which uses base local planner. how to use pose_follower with move base ? |
| 2019-11-05 01:57:04 -0500 | edited question | Bi-Directional Navigation using Move Base for Rosbot Bi-Directional Navigation using Move Base for turtlebot Hi All, I am using ROS Kinetic on ubuntu 16.04 OS. I am working |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.