
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-09-07 22:54:48 -0500 | received badge | ● Famous Question (source) |
| 2023-09-07 22:54:48 -0500 | received badge | ● Notable Question (source) |
| 2023-09-07 22:54:48 -0500 | received badge | ● Popular Question (source) |
| 2022-09-30 14:54:39 -0500 | asked a question | ROS2 rqt_gui error: unrecognized arguments --perspective-file ROS2 rqt_gui error: unrecognized arguments --perspective-file Hello everyone, I am trying to launch RQT from a launch f |
| 2020-03-11 17:34:45 -0500 | received badge | ● Taxonomist |
| 2019-08-11 19:25:23 -0500 | received badge | ● Famous Question (source) |
| 2019-07-23 14:24:14 -0500 | received badge | ● Famous Question (source) |
| 2019-07-19 13:10:21 -0500 | received badge | ● Enthusiast |
| 2019-07-18 22:32:38 -0500 | received badge | ● Notable Question (source) |
| 2019-07-18 12:21:59 -0500 | commented answer | Autoware Tools - Vector Map Builder: cannot see point cloud file due to RGB value This worked! Thank you for your help! Just to put it out there for anyone else needing help on this subject: approximat |
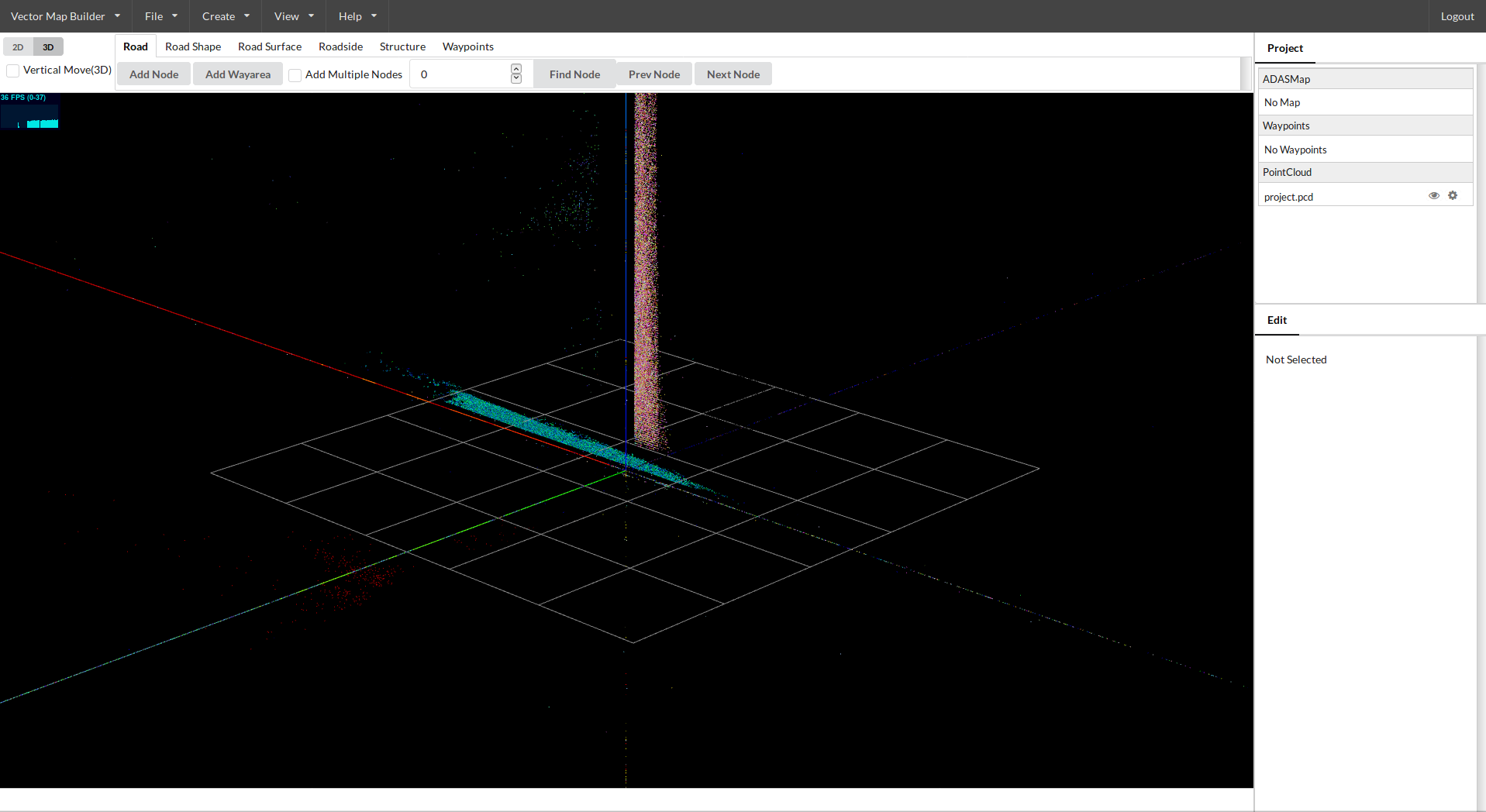
| 2019-07-18 12:17:38 -0500 | marked best answer | Autoware Tools - Vector Map Builder: cannot see point cloud file due to RGB value Hello all, I am currently trying to build a vector map using Autoware's Vector Map Builder with a .pcd map created with Autoware's ndt_mapping process in ROS Kinetic Autoware version 1.10 (.pcd map attached). When I load the file in to the Vector Map Builder (found here: https://tools.tier4.jp/vector_map_bui...), the points are black and cannot be distinguished from the background well enough to create a vector map. When I created the map file with ndt_mapping I used the generic settings and when I tried to edit the RGB value in CloudCompare, the program seems to split it up by RGB value (despite the fact that I changed the value from black to white) - see images at Google drive link below. Bag file, .pcd map, 2x screenshots of vector map builder: https://drive.google.com/drive/folder... Do I need to do something special during the .pcd file creation step with ndt_mapping? Is there a way to convert the file from black RGB to something lighter in order to use it to create a vector map in Autoware? Thank you! |
| 2019-07-18 12:14:17 -0500 | commented question | Autoware Tools - Vector Map Builder: cannot see point cloud file due to RGB value Sure! (first time didn't want to upload so I went for Google Drive) |
| 2019-07-18 12:13:08 -0500 | edited question | Autoware Tools - Vector Map Builder: cannot see point cloud file due to RGB value Autoware Tools - Vector Map Builder: cannot see point cloud file due to RGB value Hello all, I am currently trying to b |
| 2019-07-17 06:24:42 -0500 | received badge | ● Popular Question (source) |
| 2019-07-16 16:00:50 -0500 | asked a question | Autoware Tools - Vector Map Builder: cannot see point cloud file due to RGB value Autoware Tools - Vector Map Builder: cannot see point cloud file due to RGB value Hello all, I am currently trying to b |
| 2019-07-13 23:22:23 -0500 | received badge | ● Notable Question (source) |
| 2019-07-12 16:24:22 -0500 | commented answer | Autoware NDT_Matching not matching Yamato, Thank you for your reply! The above works, with a slight modification: Step 2 should not have the indent bef |
| 2019-07-12 16:18:02 -0500 | marked best answer | Autoware NDT_Matching not matching Hello, I am currently attempting to run Autoware’s ndt_matching process with little success. I have gotten the ndt_matching to work in the ROSBAG Demo provided on the gitlab with the suggested/preset settings and with changing it from starting with GNSS to starting at an initial position of [0,0,0,0,0,0] and changing the type of matching (pcl_generic, pcl_anh, and pcl_openmp). So far I have built a few .pcd map files with the ndt_mapping process and have attempted to use that to localize off of using a similar process to what is described in the example launch files:
Since the ndt_mapping process does not seem to include gnss data from the bag file, I initialize the position with [0,0,0,0,0,0]. Predict Pose is ON. I have increased and decreased the following values individually and in combination: Error Threshold, Resolution, Step Size, Transformation Epsilon, and Maximum Iterations for three of the four Method Types (pcl_generic, pcl_anh, and pcl_openmp) {did not use the pcl_anh_gpu due to memory errors on my computer related to the gpu} I am not using Odometry nor IMU but I do have Get Height checked because that was what the original ndt_matching had as its option on the original my_localization.launch. I have started with the preset settings (the ones that are used and work on the ROSBAG demo) of Error Threshold=1, Resolution=1, Step Size=0.1, Transformation Epsilon=0.01, and Maximum Iterations=30, but again have increased/decreased those values and tested the results. I have created 3 .pcd maps: two of the area surrounding my building, with a different [0,0,0] for both, and one inside my lab. Initially, when using the outside maps, I was having the problem (mostly with pcl_openmp) of the ndt_matching initially checking around the start point but then eventually zooming off the map unable to recover. However, now even when I run the map inside my lab and the vehicle has not moved from the position where the map was recorded, the ... (more) |
| 2019-07-12 16:18:02 -0500 | received badge | ● Scholar (source) |
| 2019-07-12 16:17:51 -0500 | received badge | ● Supporter (source) |
| 2019-07-12 12:56:27 -0500 | received badge | ● Student (source) |
| 2019-07-12 04:53:38 -0500 | received badge | ● Popular Question (source) |
| 2019-07-11 19:05:11 -0500 | asked a question | Autoware NDT_Matching not matching Autoware NDT_Matching not matching Hello, I am currently attempting to run Autoware’s ndt_matching process with little |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}
{kind=link}