
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-04-17 10:31:08 -0500 | received badge | ● Nice Question (source) |
| 2020-12-18 12:53:16 -0500 | marked best answer | vision_ssd_detect cannot be launched (fine compilation of ssdcaffe and CUDA enabled device) Hi all, It's not possible to launch vision_ssd_detect because it is not possible to find the "libcaffe.so.1.0.0-rc3". Compilation with ssdcaffe went well (followed http://caffe.berkeleyvision.org/insta...) and then make & make distribute. I am not able to track where this issue is coming from. I attach the terminal output for ./colcon_release with CUDA flag 1 for debugging purposes. System Specs: Ubuntu 16.04 ROS Kinetic Autoware git commit: 42aba146 CUDA 8.0 Autoware build result - SSDCAFFE build result and .launch log file: 1- https://drive.google.com/file/d/1Epki... 2- https://drive.google.com/file/d/1UPDz... 3- https://drive.google.com/file/d/1ltTW... /home/ocp/Autoware/ros/install/runtime_manager/lib/runtime_manager/runtime_manager_dialog.py:2865: wxPyDeprecationWarning: Call to deprecated item. wx.InitAllImageHandlers() Unable to register with master node [http://localhost:11311]: master may not be running yet. Will keep trying. loading qs.yaml Subscribe[localization] topic=/ndt_stat, key=/ndt_stat.NDTStat.exe_time Subscribe[detection] topic=/topic2, key=/topic2 Subscribe[detection] topic=/topic1, key=/topic1 loading setup.yaml ['rosparam', 'set', 'tf_x', '1.2'] ['rosparam', 'set', 'tf_y', '0.0'] ['rosparam', 'set', 'tf_z', '2.0'] ['rosparam', 'set', 'tf_yaw', '0.0'] ['rosparam', 'set', 'tf_pitch', '0.0'] ['rosparam', 'set', 'tf_roll', '0.0'] ['rosparam', 'set', 'localizer', 'velodyne'] loading map.yaml loading sensing.yaml loading computing.yaml loading interface.yaml loading data.yaml loading simulation.yaml ['rosparam', 'set', '/use_sim_time', 'false'] loading status.yaml loading state.yaml loading topics.yaml ['roslaunch', 'vision_ssd_detect', 'vision_ssd_detect.launch', 'score_threshold:=0.6', 'image_src:=/image_raw', 'network_definition_file:=/home/ocp/ssdcaffe/models/VGGNet/VOC0712Plus/SSD_300x300/deploy.prototxt', 'pretrained_model_file:=/home/ocp/ssdcaffe/models/VGGNet/VOC0712Plus/SSD_300x300/VGG_VOC0712Plus_SSD_300x300_iter_240000.caffemodel', 'use_gpu:=True', 'gpu_device_id:=0'] pid=2337 sched policy=OTHER prio=0 /home/ocp/Autoware/ros/install/vision_ssd_detect/lib/vision_ssd_detect/vision_ssd_detect: error while loading shared libraries: libcaffe.so.1.0.0-rc3: cannot open shared object file: No such file or directory [vision_ssd_detect-1] process has died [pid 2356, exit code 127, cmd /home/ocp/Autoware/ros/install/vision_ssd_detect/lib/vision_ssd_detect/vision_ssd_detect __name:=vision_ssd_detect __log:=/home/ocp/.ros/log/d9212ea6-9a00-11e9-8b7c-a4fc771a0d0d/vision_ssd_detect-1.log]. log file: /home/ocp/.ros/log/d9212ea6-9a00-11e9-8b7c-a4fc771a0d0d/vision_ssd_detect-1*.log /image_raw Thanks in advance! |
| 2020-10-14 14:33:17 -0500 | received badge | ● Taxonomist |
| 2020-04-26 09:50:18 -0500 | received badge | ● Famous Question (source) |
| 2020-02-05 14:13:26 -0500 | marked best answer | Euclidean Cluster Detect - Parameter description Hi all, I was wondering where I can find any documentation on lidar_euclidean_cluster_detect package developed in autowre. I can get it work just fine but I would like to read any publications about it as I am dealing with specific parameters now, any papers etc. Thanks! |
| 2020-02-05 14:13:06 -0500 | received badge | ● Notable Question (source) |
| 2020-01-27 16:06:27 -0500 | commented answer | Euclidean Cluster Detect - Parameter description Thanks, I was looking more for the theory behind it e.g. publications. the ReadMe seems to be informative for parameters |
| 2020-01-26 21:05:44 -0500 | received badge | ● Student (source) |
| 2020-01-26 21:04:20 -0500 | received badge | ● Popular Question (source) |
| 2020-01-23 18:03:24 -0500 | asked a question | Euclidean Cluster Detect - Parameter description Euclidean Cluster Detect - Parameter description Hi all, I was wondering where I can find any documentation on lidar_eu |
| 2019-11-17 21:57:05 -0500 | commented answer | Documentation on OpenPlanner (Autoware) @Hatem,. Yes I do have vectormap read and available in rostopics (however my vectormap includes whiteline, point node li |
| 2019-11-17 21:53:32 -0500 | edited question | Documentation on OpenPlanner (Autoware) Documentation on OpenPlanner (Autoware) Hi all, I was wondering if there is any documentation on using openplanner on |
| 2019-11-17 21:53:32 -0500 | received badge | ● Editor (source) |
| 2019-11-17 21:48:32 -0500 | commented answer | Documentation on OpenPlanner (Autoware) @Hatem, I checked what you suggested. The object is detected and is located properly by the motion predictor. Trajectory |
| 2019-11-06 18:44:26 -0500 | commented answer | Documentation on OpenPlanner (Autoware) Thanks Hatem, your solution worked for locating objects correctly in the environments. But I found why it did not work, |
| 2019-10-25 01:32:58 -0500 | received badge | ● Famous Question (source) |
| 2019-10-21 23:32:04 -0500 | commented answer | Documentation on OpenPlanner (Autoware) I am localising the vehicle using proper nodes then: ray_ground_filter vel_pose_connect lidar_euclidean_cluster_detect l |
| 2019-10-20 19:36:49 -0500 | commented answer | Documentation on OpenPlanner (Autoware) Hi Hatem, I tried to replicate the result in the video on youtube with the most recent version of Autoware on ROS Kineti |
| 2019-10-20 18:08:35 -0500 | received badge | ● Famous Question (source) |
| 2019-10-07 05:34:38 -0500 | received badge | ● Notable Question (source) |
| 2019-10-07 05:34:38 -0500 | received badge | ● Famous Question (source) |
| 2019-09-23 19:59:03 -0500 | received badge | ● Rapid Responder (source) |
| 2019-09-23 19:59:03 -0500 | answered a question | How to implement obstacles avoidance in Autoware I am also interested in this topic. I used open planner and dp planner and so multiple paths are generated and an altern |
| 2019-09-20 16:17:10 -0500 | commented answer | Documentation on OpenPlanner (Autoware) Thanks, the video is indeed helpful. But I was looking for more of a written instruction and explanations. specially reg |
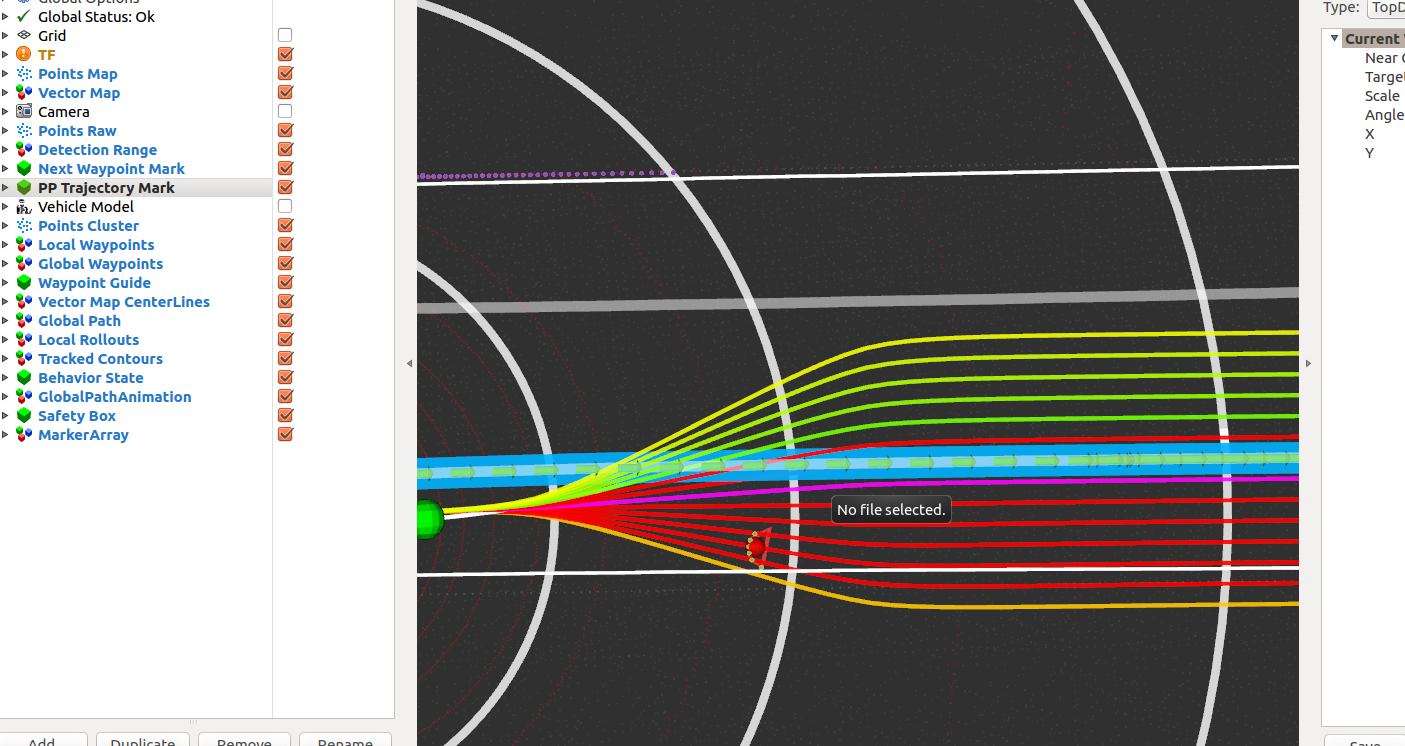
| 2019-09-11 18:12:50 -0500 | marked best answer | Documentation on OpenPlanner (Autoware) Hi all, I was wondering if there is any documentation on using openplanner on autoware. I found the publication about open planner which explains the package itself in details but there is no instruction on how to use it, what nodes to launch and etc. Update: This question is about detecting and using obstacle information in deciding on lane trajectories the vehicle should take. With Obstacle:
|
| 2019-09-11 18:12:50 -0500 | received badge | ● Scholar (source) |
| 2019-09-10 07:42:40 -0500 | received badge | ● Notable Question (source) |
| 2019-08-27 21:28:19 -0500 | received badge | ● Popular Question (source) |
| 2019-08-22 23:16:39 -0500 | asked a question | Documentation on OpenPlanner (Autoware) Documentation on OpenPlanner (Autoware) Hi all, I was wondering if there is any documentation on using openplanner on |
| 2019-08-22 23:06:42 -0500 | answered a question | Adding a topic to an existing rosbag file One way is what was mentioned in the first comment. Another way is to let this calculation and new topic be published an |
| 2019-08-22 23:06:42 -0500 | received badge | ● Rapid Responder (source) |
| 2019-07-31 21:18:43 -0500 | received badge | ● Famous Question (source) |
| 2019-07-23 23:12:58 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
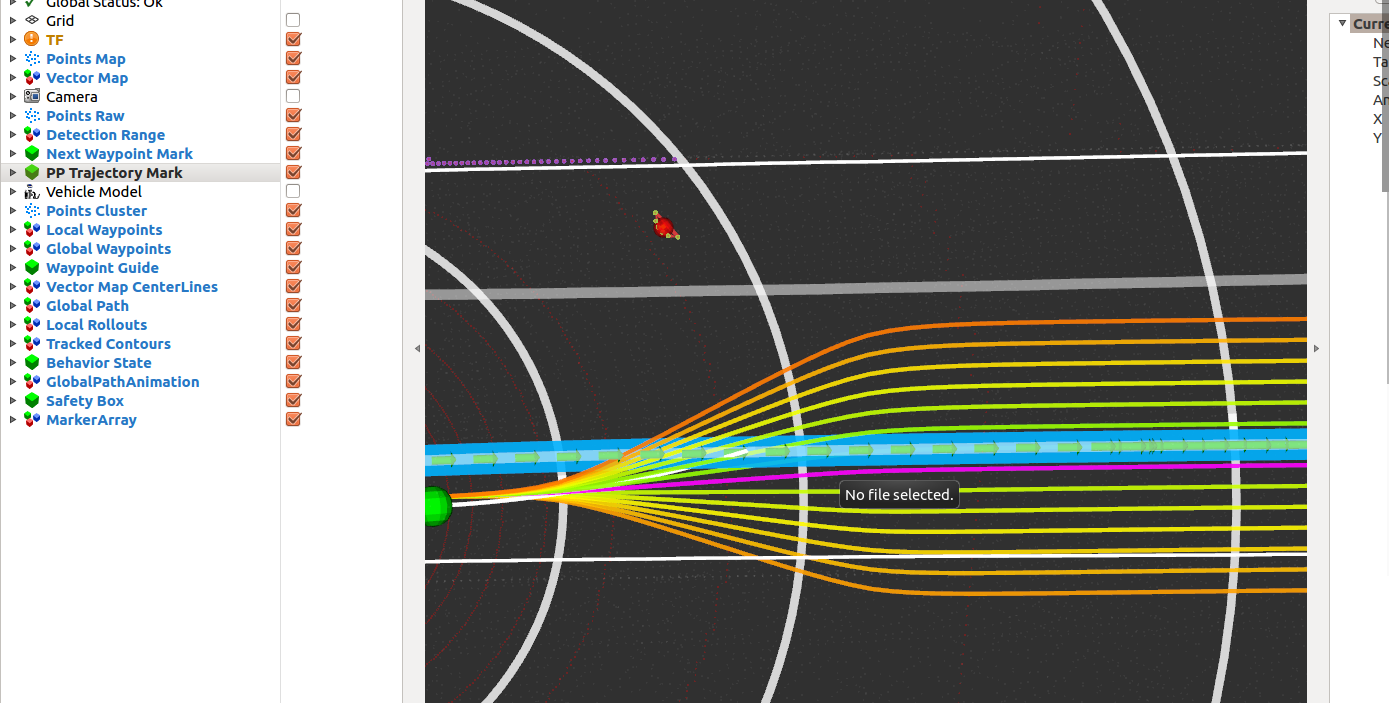
 No Obstacle:
No Obstacle:
 Thanks.
Cheers .
Thanks.
Cheers .