The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-08-12 17:58:54 -0500 | received badge | ● Favorite Question (source) |
| 2021-08-12 17:57:52 -0500 | received badge | ● Nice Question (source) |
| 2018-07-24 00:04:56 -0500 | received badge | ● Notable Question (source) |
| 2018-07-24 00:04:56 -0500 | received badge | ● Popular Question (source) |
| 2016-11-04 02:04:22 -0500 | received badge | ● Notable Question (source) |
| 2016-11-04 02:04:22 -0500 | received badge | ● Popular Question (source) |
| 2016-11-04 02:04:22 -0500 | received badge | ● Famous Question (source) |
| 2016-08-14 01:25:19 -0500 | marked best answer | launch file error: cannot launch node of type [map_server/map_server] I created a launch file that contains: But the output is: I can run the node manually and successfully: |
| 2016-08-14 01:23:12 -0500 | marked best answer | amcl_pose does not publish Following my last question, No laser scan recieved still nothing is published by /amcl_pose and roswtf out is: What's the problem? |
| 2016-04-13 08:36:40 -0500 | commented question | Error: cannot launch node of type [message_to_tf/message_to_tf]: can't locate node [message_to_tf] in package [message_to_tf] Have you installed message_to_tf package? |
| 2016-04-04 06:57:47 -0500 | asked a question | Running fovis_ros on Hydro I want to get odometry data from Kinect data. It seems the only solution around is using fovis_ros. After playing the bag file, which contains Kinect data, I run Here is the problem:
I can provide But for other two Here is what I got after running The other thing is, what is I'm using ROS Hydro and here are details of the bag file: |
| 2016-03-11 02:38:40 -0500 | received badge | ● Famous Question (source) |
| 2016-02-17 11:27:47 -0500 | marked best answer | Get depth from Kinect sensor in gazebo simulator I'm trying to find a specific pixel's depth of It's what I get: www.uppic.com/do.php?img=97090) (Sorry I have not enough karma to upload image. It's what I see in rviz: www.uppic.com/do.php?img=97092 How can I fix it to get depth of pixels? |
| 2016-01-26 12:30:22 -0500 | received badge | ● Famous Question (source) |
| 2016-01-26 12:30:22 -0500 | received badge | ● Notable Question (source) |
| 2016-01-26 12:30:22 -0500 | received badge | ● Popular Question (source) |
| 2015-10-26 13:48:37 -0500 | marked best answer | fovis odometry failed: NO_DATA I'm trying to get 3D odometry data using fovis, but seems it does not work, because I face bunch of errors: First of all, I run How can I fix it? |
| 2015-09-21 23:44:08 -0500 | received badge | ● Popular Question (source) |
| 2015-09-21 23:44:08 -0500 | received badge | ● Notable Question (source) |
| 2015-04-21 04:00:31 -0500 | marked best answer | amcl does not need odometry data? I'm reading amcl document on ROS Wiki. In its subscribed topics there is not odometry topic, why? It works only with laser? |
| 2015-03-24 19:46:13 -0500 | received badge | ● Famous Question (source) |
| 2015-01-31 03:03:33 -0500 | received badge | ● Nice Question (source) |
| 2014-09-25 08:11:48 -0500 | received badge | ● Famous Question (source) |
| 2014-07-01 15:16:27 -0500 | marked best answer | Particle filter in ROS I'm looking for particle filter implementation in ROS to use in mobile robot localization, but it seems the only available package is amcl (Adaptive Monte Carlo), I'm not sure is it possible to use it as particle filter or not, and if it's feasible, how? Note: The robot (wheeled robot) provides odometry data and another data source is |
| 2014-06-30 19:51:17 -0500 | received badge | ● Famous Question (source) |
| 2014-06-21 02:33:33 -0500 | received badge | ● Famous Question (source) |
| 2014-06-17 00:36:47 -0500 | received badge | ● Notable Question (source) |
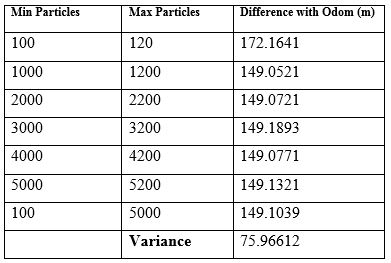
| 2014-06-11 01:32:13 -0500 | asked a question | Different amcl's max_particles and min_particles give the same result I'm using |
| 2014-06-11 01:22:51 -0500 | commented answer | Any one can create a bag file for me? Finally I had to use MIT dataset. |
| 2014-05-25 18:21:03 -0500 | received badge | ● Good Question (source) |
| 2014-05-20 05:39:14 -0500 | received badge | ● Popular Question (source) |
| 2014-05-17 21:23:58 -0500 | asked a question | Measure code/node running time I'm running |
| 2014-05-17 21:17:36 -0500 | commented answer | Any one can create a bag file for me? Gazebo's odometry data are almost accurate and my computer is not able to run Gazebo and record bag file for in a large environment. |
| 2014-05-17 16:32:19 -0500 | received badge | ● Famous Question (source) |
| 2014-05-06 02:13:33 -0500 | received badge | ● Nice Question (source) |
| 2014-05-04 22:28:20 -0500 | received badge | ● Notable Question (source) |
| 2014-05-04 20:33:42 -0500 | commented answer | Any one can create a bag file for me? It seems none of them have camera related topics, they are quite small files to have video data. |
| 2014-05-04 19:48:45 -0500 | received badge | ● Popular Question (source) |
| 2014-05-04 18:35:47 -0500 | edited question | Any one can create a bag file for me? Hello, To work on my thesis I need a bag file from a PR2 (or similar differential wheeled robot) sensors, and follows a simple closed path, like a square or a triangle. Topic that I need are:
Can anyone do me this favor and prepare such bag file? One more thing, there most be walls or something around the path to create a map with using |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.