The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2019-06-15 00:00:15 -0500 | received badge | ● Famous Question (source) |
| 2019-05-17 16:10:08 -0500 | received badge | ● Famous Question (source) |
| 2019-04-13 08:43:35 -0500 | received badge | ● Notable Question (source) |
| 2019-04-04 06:43:54 -0500 | received badge | ● Famous Question (source) |
| 2019-04-02 19:52:28 -0500 | received badge | ● Popular Question (source) |
| 2019-03-29 08:13:29 -0500 | received badge | ● Notable Question (source) |
| 2019-03-27 05:27:52 -0500 | received badge | ● Popular Question (source) |
| 2019-03-27 05:21:50 -0500 | edited question | Roadmap for my pick and place simulation project Roadmap for my pick and place simulation project Hello everyone, I am trying to implement the following simulation. I h |
| 2019-03-27 05:08:00 -0500 | edited question | Roadmap for my pick and place simulation project Roadmap for my pick and place simulation project Hello everyone, I am trying to implement the following simulation. I h |
| 2019-03-27 05:04:24 -0500 | commented question | Roadmap for my pick and place simulation project Okay so the desired endresult is to run this simulation in gazebo. In the pictures I added above you can see my current |
| 2019-03-27 04:01:29 -0500 | asked a question | Roadmap for my pick and place simulation project Roadmap for my pick and place simulation project Hello everyone, I am trying to implement the following simulation. I h |
| 2019-03-26 01:59:45 -0500 | received badge | ● Enthusiast |
| 2019-03-25 08:58:00 -0500 | commented question | Rviz/ Moveit! issue with controller: Action client not connected Okay I finally figured it out, apparently many things have to be right. I noticed when I ran my gazebo Simulator an issu |
| 2019-03-25 04:55:44 -0500 | asked a question | Rviz/ Moveit! issue with controller: Action client not connected Rviz/ Moveit! issue with controller: Action client not connected I followed this Youtube-tutorial, but I end up not bein |
| 2019-03-23 08:18:35 -0500 | edited question | Rviz/ Moveit! issue with controller: Action client not connected Rviz/ Moveit! issue with controller: Action client not connected I followed this Youtube-tutorial, but I end up not bein |
| 2019-03-23 08:17:16 -0500 | edited question | Rviz/ Moveit! issue with controller: Action client not connected Rviz/ Moveit! issue with controller: Action client not connected I followed this Youtube-tutorial, but I end up not bein |
| 2019-03-23 06:54:06 -0500 | edited question | Rviz/ Moveit! issue with controller: Action client not connected Rviz/ Moveit! issue with controller: Action client not connected I followed this Youtube-tutorial, but I end up not bein |
| 2019-03-23 06:03:31 -0500 | edited question | Rviz/ Moveit! issue with controller: Action client not connected Rviz/ Moveit! issue with controller: Action client not connected I followed this Youtube-tutorial, but I end up not bein |
| 2019-03-23 06:02:44 -0500 | asked a question | Rviz/ Moveit! issue with controller: Action client not connected Rviz/ Moveit! issue with controller: Action client not connected I followed this Youtube-tutorial, but I end up not bein |
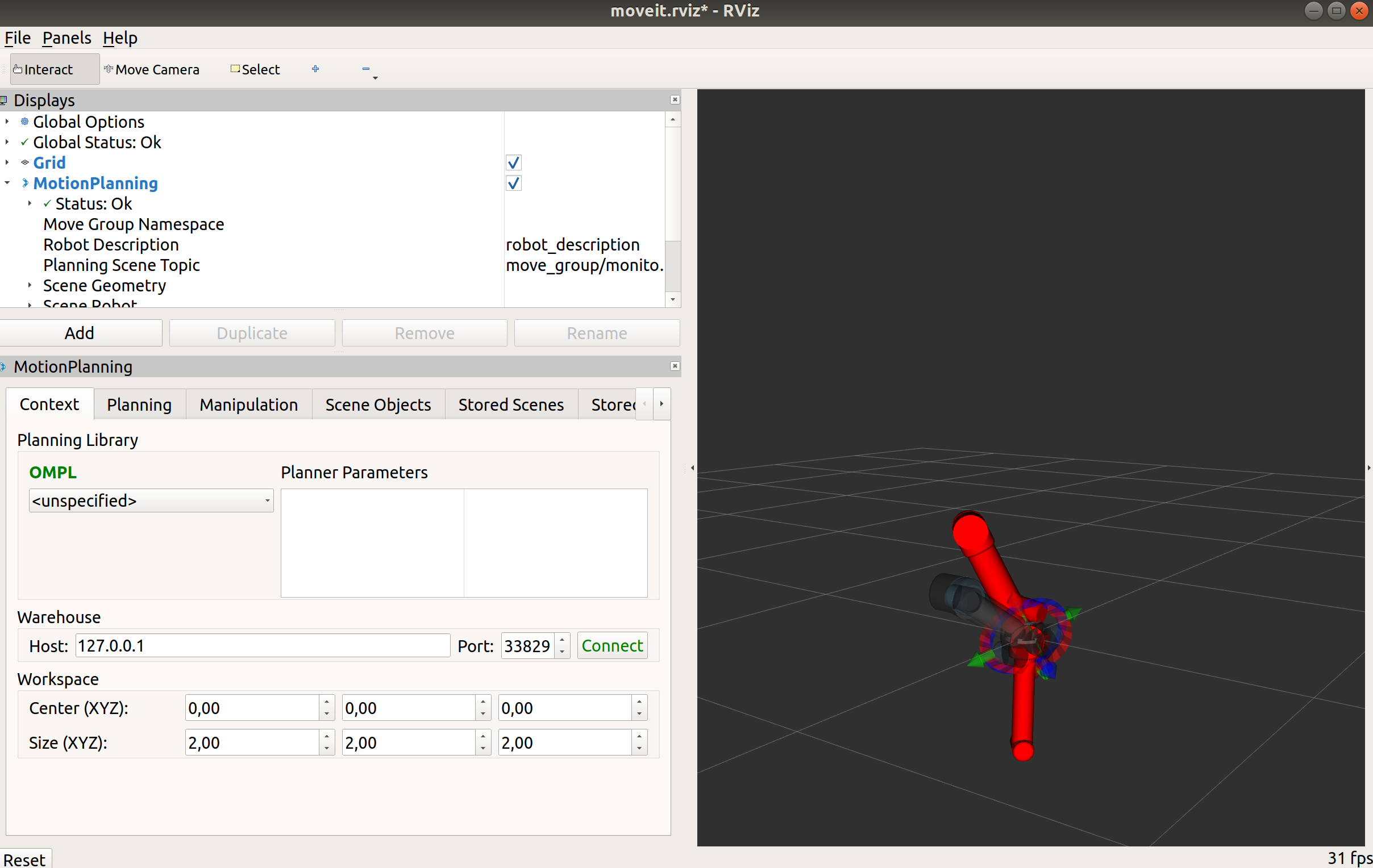
| 2019-03-23 04:17:44 -0500 | marked best answer | Rviz shows robot in a "crippled way" using MotionPlanning Anytime I run Rviz and use Motionplanning the robot is not shown the way it should be... Right now I am trying to follow this tutorial: https://www.youtube.com/watch?v=j6bBx... and as soon as I run the created launch file rviz pops up and shows me a strange representation of my ur5. It looks like every single link is connected to the base link. I had the same issue when I tried the moveit Panda Tutorial. If I only add the robot model it looks fine, but as soon as I add the MotionPlanning it gets weird. Execution from there almost never works...
2 erros I see in the bash (dunno if they are responsible for the behaviour): I would be glad if you can explain in the easiest way, since I am new to everything (linux, Ros, C++). Thanks, Joel Edit: Output locale: (sorry that it doesn't look pretty with a grey background, no idea how to paste it that way) |
| 2019-03-23 04:17:44 -0500 | received badge | ● Scholar (source) |
| 2019-03-23 04:17:39 -0500 | received badge | ● Supporter (source) |
| 2019-03-22 08:40:00 -0500 | commented question | Rviz shows robot in a "crippled way" using MotionPlanning Thanks! Changing the language to english (US) and afterwards executing the code I used earlier (havn't checked yet if th |
| 2019-03-22 08:11:40 -0500 | received badge | ● Notable Question (source) |
| 2019-03-21 11:26:04 -0500 | edited question | Rviz shows robot in a "crippled way" using MotionPlanning Rviz shows robot in a "crippled way" using MotionPlanning Anytime I run Rviz and use Motionplanning the robot is not sho |
| 2019-03-21 11:23:27 -0500 | edited question | Rviz shows robot in a "crippled way" using MotionPlanning Rviz shows robot in a "crippled way" using MotionPlanning Anytime I run Rviz and use Motionplanning the robot is not sho |
| 2019-03-21 11:23:27 -0500 | received badge | ● Editor (source) |
| 2019-03-21 11:22:32 -0500 | edited question | Rviz shows robot in a "crippled way" using MotionPlanning Rviz shows robot in a "crippled way" using MotionPlanning Anytime I run Rviz and use Motionplanning the robot is not sho |
| 2019-03-21 09:54:04 -0500 | received badge | ● Popular Question (source) |
| 2019-03-21 08:28:18 -0500 | commented question | Rviz shows robot in a "crippled way" using MotionPlanning I don't know if I am getting it right. So I just copied this line now into my terminal: export LC_NUMERIC="en_US.UTF-8 |
| 2019-03-21 08:10:31 -0500 | asked a question | Rviz shows robot in a "crippled way" using MotionPlanning Rviz shows robot in a "crippled way" using MotionPlanning Anytime I run Rviz and use Motionplanning the robot is not sho |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.