The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
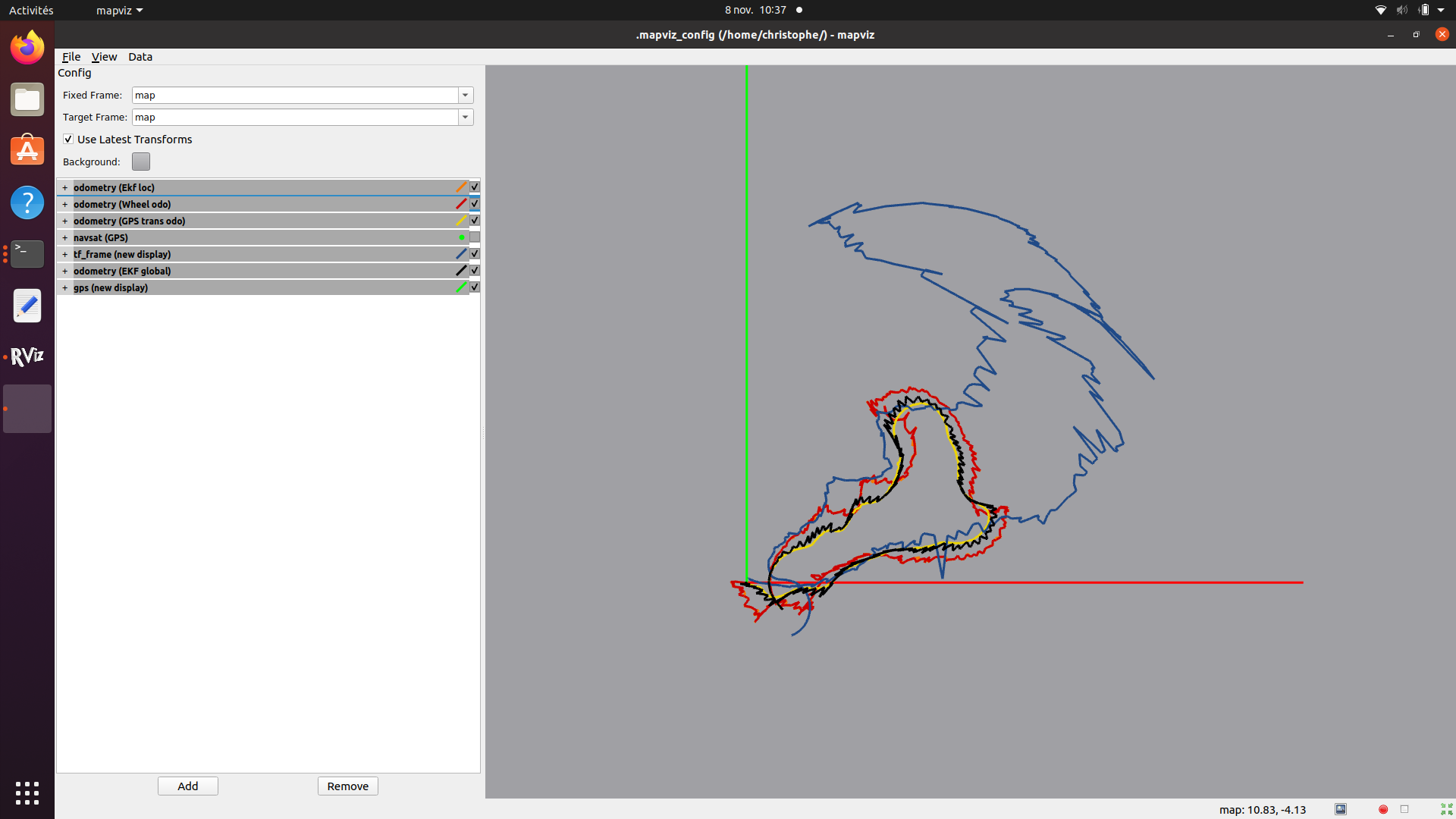
| 2023-04-26 16:34:04 -0500 | marked best answer | robot_localization /map /odom drift Hello everyone, I use ROS2 Foxy along with robot_localization. I have a differential wheeled robot with odometry and 2 GPS rtk for position and heading. The sensors work properly independently. I have a clean odometry track and the heading is working fine. The problem occurs when I merge them using robot_localization, with two ekf_localisation_node (local and global) and one navsat_transform_node. I observe a shift/drift between /map and /odom frames and I have my odometry track which is getting disturbed. Under mapviz, using /map as fixed and target frame :
The blue track can become completely crazy :
Here are the parameters used in localization.yaml Do you have any idea what is causing this behavior ? Many thanks |
| 2023-04-26 16:33:48 -0500 | commented answer | robot_localization /map /odom drift Hi Tom, thanks a lot for your comment. Your suggestions are exactly the kind of issues we have encounter. First, the gps |
| 2023-04-21 02:40:04 -0500 | received badge | ● Famous Question (source) |
| 2023-02-03 01:56:58 -0500 | commented question | ros2_canopen proxy driver examples Hi, there are some examples in the test package that you have probably already seen (here). Have you been able to actual |
| 2022-11-22 03:26:39 -0500 | received badge | ● Notable Question (source) |
| 2022-11-14 02:07:34 -0500 | received badge | ● Popular Question (source) |
| 2022-11-08 07:48:19 -0500 | asked a question | robot_localization /map /odom drift robot_localization /map /odom drift Hello everyone, I use ROS2 Foxy along with robot_localization. I have a differentia |
| 2022-09-21 07:37:01 -0500 | received badge | ● Notable Question (source) |
| 2022-07-07 10:21:35 -0500 | commented question | how to set up a remote connection between the robot and the remote PC working through a VPN? Have you found the solution to this issue ? I'm facing the same problem where both can ping each other but I can't see t |
| 2022-03-31 02:16:14 -0500 | answered a question | Motor controllers recommendation Hi, You could use maxon EPOS4 controllers, they are CiA402 and work fine with ros_canopen. There is a large range of pr |
| 2022-03-10 01:04:59 -0500 | edited answer | ros_canopen with joint_position_controller does not work Hi @martinlucan, There is also an EMCY error message: 81#2032040000000000 , does anyone know what it refers to? Th |
| 2022-02-18 05:34:55 -0500 | commented answer | Adding Tutorial link automatically to a wiki page Hi @gvdhoorn, I think I saw the information to create a /tutorials page as opposed to a /Tutorials on the following page |
| 2022-02-04 11:17:55 -0500 | commented answer | Adding Tutorial link automatically to a wiki page Hi @gvdhoorn, thank you for fixing the Tutorials page, I used the lower case "tutorials" indeed. So I also deleted my wr |
| 2022-02-04 11:03:10 -0500 | received badge | ● Popular Question (source) |
| 2022-01-28 11:25:40 -0500 | marked best answer | Adding Tutorial link automatically to a wiki page Hi, I've created a tutorial for the ros_canopen package : http://wiki.ros.org/ros_canopen. I made the tutorial according to this guideline : http://wiki.ros.org/WritingTutorials. The tutorial page is located here: http://wiki.ros.org/ros_canopen/tutor... I would like the ros_canopen page to display the Tutorial links automatically in the gray square entitled "Package Links" on the upper right, but at the moment it doesn't. I read on ROS Answers that it can take up to 3 days, but I can't find any official information regarding that, and it has been a week since I published it. Am I missing something to get that link displayed or should I just wait longer or refresh something by myself ? |
| 2022-01-28 05:42:34 -0500 | asked a question | Adding Tutorial link automatically to a wiki page Adding Tutorial link automatically to a wiki page Hi, I've created a tutorial for the ros_canopen package : http://wiki |
| 2022-01-19 08:38:00 -0500 | answered a question | ros_canopen with joint_position_controller does not work Hi @martinlucan, There is also an EMCY error message: 81#2032040000000000 , does anyone know what it refers to? Th |
| 2021-12-23 08:51:07 -0500 | commented answer | Change a device state via "0x6041 Controlword" and TxPDO like this: TxPDO - TxPDO1 1st object: Statusword (0x60410010) - TxPDO1 2nd object: Modes of Operation display |
| 2021-12-23 08:46:01 -0500 | commented answer | Change a device state via "0x6041 Controlword" Hi Martin, Looking at your DCF file, your PDO mapping is different than what ros_canopen expects, so this is most likel |
| 2021-12-23 08:45:44 -0500 | commented answer | Change a device state via "0x6041 Controlword" Hi Martin, Looking at your DCF file, your PDO mapping is different than what ros_canopen expects, so this is most likel |
| 2021-12-02 11:18:09 -0500 | answered a question | Change a device state via "0x6041 Controlword" Hi martinlucan, it seems that you try to set the Statusword read-only object. Your idexes are inverted: Controlword is 0 |
| 2021-10-26 03:18:46 -0500 | commented question | ROS2 canopen availability Hi, there is a partial migration done here with config files given at the end of that post, and there is a socketcan wra |
| 2021-10-26 03:04:27 -0500 | received badge | ● Autobiographer |
| 2021-10-25 07:24:38 -0500 | received badge | ● Famous Question (source) |
| 2021-08-09 13:46:24 -0500 | received badge | ● Famous Question (source) |
| 2021-07-06 01:58:51 -0500 | received badge | ● Notable Question (source) |
| 2021-07-05 03:13:15 -0500 | commented answer | Control single Maxon motor after successful ros_canopen initialization Hi martinlucan, are you able to share all your configuration files or update your question to see where the problem coul |
| 2021-06-24 07:40:41 -0500 | received badge | ● Notable Question (source) |
| 2021-06-24 07:03:49 -0500 | commented answer | ros_canopen Homing method AccessType Setting the DefaultValue to 0 works indeed, thanks. Do you think the writing of the Homing method value could be skipped |
| 2021-06-24 05:05:20 -0500 | commented answer | ros_canopen Homing method AccessType "This should not be needed.. (Unless the object is const in the device's object directory." I agree, and I think I foun |
| 2021-06-24 05:04:32 -0500 | commented answer | ros_canopen Homing method AccessType This should not be needed.. (Unless the object is const in the device's object directory. I agree, and I think I found t |
| 2021-06-24 05:04:08 -0500 | commented answer | ros_canopen Homing method AccessType This should not be needed.. (Unless the object is const in the device's object directory. I agree, and I think I found t |
| 2021-06-21 05:32:12 -0500 | commented answer | Why ros_canopen needs EDS/DCF file ? I am a bit confused by this process, as a DCF file contains for example objects which are read only and calculated durin |
| 2021-06-21 01:16:38 -0500 | received badge | ● Popular Question (source) |
| 2021-06-16 02:50:29 -0500 | commented question | Odometry for a holonomic robot with 3 wheels Hi, I didn't find it at the time, so I wrote the code with the kinematics to get the odometry. |
| 2021-06-16 02:47:20 -0500 | edited question | roslaunch using tmux for large project [solved] roslaunch using tmux for large project Hello, I have a project with a launch file that includes other launch files and |
| 2021-06-16 02:42:58 -0500 | edited question | rqt_reconfigure unable to resize column in Kinetic [solved] rqt_reconfigure unable to resize column in Kinetic Hello, When I launch (with ROS Kinetic) rosrun rqt_reconfigure rqt_ |
| 2021-06-15 20:18:17 -0500 | received badge | ● Popular Question (source) |
| 2021-06-15 03:15:31 -0500 | asked a question | ros_canopen Homing method AccessType ros_canopen Homing method AccessType Hi, The Homing method (object 0x6098) AccessType is usually defined as "RW" in doc |
| 2021-06-15 01:14:27 -0500 | commented answer | Why ros_canopen needs EDS/DCF file ? Hi Mathias, thank you for your detailed reply. When you say objects which have ParameterValue defined are written to the |
| 2021-06-14 05:06:37 -0500 | commented question | Simultaneous Homing in Ros Canopen Hi! Did you found how to do that ? I think you can tag again your question with ros_canopen to be noticed by the package |
| 2021-06-11 10:59:34 -0500 | asked a question | Why ros_canopen needs EDS/DCF file ? Why ros_canopen needs EDS/DCF file ? Hello, I'm using ros_canopen and was wondering how it works internally. I can get |
| 2020-10-10 03:27:10 -0500 | commented question | Move motor in velocity mode with ros_canopen Hi, I'm also trying to send a velocity command. Did you get it working ? |
| 2020-10-01 10:37:09 -0500 | commented question | Not able to initialize driver with canopen_motor_node Hi, I'm not sure how to solve your issue, but the first thing I can say is that the Maxon EPOS2 is not CiA 402 compatibl |
| 2019-12-18 22:19:13 -0500 | received badge | ● Famous Question (source) |
| 2019-12-02 08:30:43 -0500 | received badge | ● Famous Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.