The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-09-20 02:24:00 -0500 | received badge | ● Famous Question (source) |
| 2022-09-20 02:24:00 -0500 | received badge | ● Notable Question (source) |
| 2021-11-18 09:20:43 -0500 | received badge | ● Famous Question (source) |
| 2021-05-02 12:54:49 -0500 | received badge | ● Notable Question (source) |
| 2020-12-22 04:32:27 -0500 | received badge | ● Popular Question (source) |
| 2020-11-14 17:13:23 -0500 | received badge | ● Popular Question (source) |
| 2020-11-14 02:43:39 -0500 | commented question | Call video_recorder Start & stop via topic I solve it , I hope this will help someone. I shared with everyone found it helpful: As was written above, I tried to ki |
| 2020-11-14 02:43:39 -0500 | received badge | ● Commentator |
| 2020-11-10 05:21:31 -0500 | asked a question | Call video_recorder Start & stop via topic Call video_recorder Start & stop via topic Hi, I am using the video_recorder to save a video stream to a file using |
| 2019-08-15 08:43:19 -0500 | received badge | ● Famous Question (source) |
| 2019-07-23 08:57:40 -0500 | received badge | ● Famous Question (source) |
| 2019-05-11 10:29:27 -0500 | marked best answer | CMake Error: The following variables are used in this project but they are set to NOTFOUND. Hello everyone, Actually, I am working on Ubuntu 14 and Indigo Version, so am trying to make some packages. I got an error message below : I tried to use ROS_LANG_DISABLE like is mentioned in ROS EnvironmentVariables : $export ROS_LANG_DISABLE=genlisp but this can not solve the problem. How would I fix it? Thanks. Edit: Thanks for your help @gvdhoorn, and I'm going through the tutorial modbus to install it, and there is my CMAKE File below : It seems that my environment is set correctly! But I don’t know where is the problem and how can I resolve it??! |
| 2019-05-11 10:29:17 -0500 | commented answer | CMake Error: The following variables are used in this project but they are set to NOTFOUND. thank you very much, your suggestions helped me to solve the problem .. when am looking for the modbus version .. I disc |
| 2019-05-11 06:06:13 -0500 | commented answer | CMake Error: The following variables are used in this project but they are set to NOTFOUND. thanks for your help , but the project that am working on ,have not any documentation so the only thing that i should fi |
| 2019-05-11 05:36:24 -0500 | edited question | CMake Error: The following variables are used in this project but they are set to NOTFOUND. CMake Error: The following variables are used in this project but they are set to NOTFOUND. Hello everyone, Actually, I |
| 2019-05-10 19:06:15 -0500 | received badge | ● Notable Question (source) |
| 2019-05-10 17:10:28 -0500 | received badge | ● Popular Question (source) |
| 2019-05-10 04:33:18 -0500 | edited question | CMake Error: The following variables are used in this project but they are set to NOTFOUND. CMake Error: The following variables are used in this project but they are set to NOTFOUND. Hello everyone, Actually, I |
| 2019-05-10 04:23:35 -0500 | asked a question | CMake Error: The following variables are used in this project but they are set to NOTFOUND. CMake Error: The following variables are used in this project but they are set to NOTFOUND. Hello everyone, Actually, I |
| 2019-04-10 06:48:10 -0500 | received badge | ● Notable Question (source) |
| 2019-04-09 15:53:02 -0500 | commented answer | Cannot save data Callback function Thanks i got it ;) |
| 2019-04-09 11:28:40 -0500 | commented answer | Cannot save data Callback function thank you, I try it but it saves only the last value, a = open('goals.txt', 'w+') data_to_save = str(data.pose.x) + |
| 2019-04-09 11:25:23 -0500 | edited question | Cannot save data Callback function Cannot save data Callback function What I am really looking for is a way to save all value's message that a node receive |
| 2019-04-09 11:16:12 -0500 | received badge | ● Popular Question (source) |
| 2019-04-09 11:15:18 -0500 | marked best answer | Cannot save data Callback function What I am really looking for is a way to save all value's message that a node receives (in a list, CSV file..) in a way that I can later do something with this values. So this is data received :
I tried to put all these values in myData List: but it's not what I want(Even with append) ! it put every value in a list like this :
Also, I tried to save this value in a CSV File : it saves only the last value :
So how can I save collected messages (data)? Any idea? Thanks for answering and for your time in advance, Tayssir |
| 2019-04-09 11:15:16 -0500 | commented answer | Cannot save data Callback function Thanks, I'm absolute beginner and I'm just getting started learning ROS and I have no idea about rosbag but I will try |
| 2019-04-09 10:55:29 -0500 | commented answer | Cannot save data Callback function thank you, I try it but it saves only the last value, I think that i should not put it in my callback. So the problem no |
| 2019-04-09 08:15:16 -0500 | received badge | ● Famous Question (source) |
| 2019-04-09 07:17:00 -0500 | asked a question | Cannot save data Callback function Cannot save data Callback function What I am really looking for is a way to save all value's message that a node receive |
| 2019-03-15 08:22:03 -0500 | received badge | ● Supporter (source) |
| 2019-02-27 03:33:54 -0500 | received badge | ● Citizen Patrol (source) |
| 2019-02-27 02:59:24 -0500 | edited question | Config File for Turtlesim Config File for Turtlesim I'm absolute beginner in Ubuntu and ROS. I'm using 14.04 LTS (virtualbox) and indigo . I am l |
| 2019-02-27 02:59:24 -0500 | received badge | ● Editor (source) |
| 2019-02-26 03:32:44 -0500 | received badge | ● Organizer (source) |
| 2019-02-26 03:31:08 -0500 | asked a question | Config File for Turtlesim Config File for Turtlesim I'm absolute beginner in Ubuntu and ROS. I'm using 14.04 LTS (virtualbox) and indigo . I am l |
| 2019-02-26 02:26:23 -0500 | received badge | ● Enthusiast |
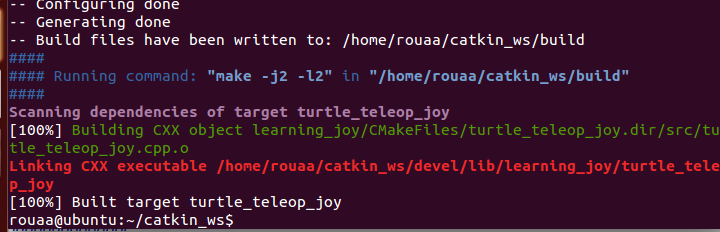
| 2019-02-23 02:35:04 -0500 | marked best answer | Linking CXX executable error I'm absolute beginner in Ubuntu and ROS. I'm using 14.04 LTS (virtualbox) and indigo .I'm just getting started learning ROS and I'm going through the tutorials WritingTeleopNode . I am trying to create to write a teleoperation node and use it to drive the turtle in the turtlesim. First , I create learning_joy/src/turtle_teleop_joy.cpp and the launch File launch/turtle_joy.launch as mentioned in the tutorial . But after adding the following lines to my CMakeLists.txt file: then building my workspace with catkin_make ,I'm getting the following error : Update Thanks Peter there is the full output :
|
| 2019-02-23 02:35:04 -0500 | received badge | ● Scholar (source) |
| 2019-02-22 00:25:04 -0500 | commented question | Linking CXX executable error Thanks Peter for your help. |
| 2019-02-21 21:23:52 -0500 | received badge | ● Notable Question (source) |
| 2019-02-21 14:33:37 -0500 | commented question | Linking CXX executable error thanks @gvdhoorn . I update the question with the screenshot. |
| 2019-02-21 14:28:59 -0500 | edited question | Linking CXX executable error Linking CXX executable error I'm absolute beginner in Ubuntu and ROS. I'm using 14.04 LTS (virtualbox) and indigo .I'm j |
| 2019-02-21 14:21:08 -0500 | received badge | ● Popular Question (source) |
| 2019-02-21 14:19:53 -0500 | commented question | Linking CXX executable error Even that looks red line ? Sorry but because I'am new here so I can not upload image of error. |
| 2019-02-21 13:48:40 -0500 | commented question | Linking CXX executable error I know , the code is working but the build is failed because the linking Line appears like an error with red color : L |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.