The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-05-22 08:55:33 -0500 | received badge | ● Famous Question (source) |
| 2023-05-14 23:52:00 -0500 | received badge | ● Famous Question (source) |
| 2023-05-14 23:52:00 -0500 | received badge | ● Notable Question (source) |
| 2023-05-14 23:52:00 -0500 | received badge | ● Popular Question (source) |
| 2023-02-22 01:55:21 -0500 | received badge | ● Notable Question (source) |
| 2022-10-06 19:37:21 -0500 | received badge | ● Famous Question (source) |
| 2022-10-06 19:37:21 -0500 | received badge | ● Notable Question (source) |
| 2022-10-06 19:37:21 -0500 | received badge | ● Popular Question (source) |
| 2022-08-01 05:57:28 -0500 | received badge | ● Popular Question (source) |
| 2022-08-01 03:58:05 -0500 | marked best answer | Why rviz crash when using robot_upstart? Hi everyone, really need some help in getting rviz to work with robot_upstart. I'll try to describe the issue and what I have tried as detailed as possible. 1) Requirement: I would like to make an integrated roslaunch that start when the robot computer boot/turned on. My integrated roslaunch file includes these ROS nodes:
2) Specifications:
3) Issue When I boot up the robot computer, every node except for rviz working as I intended. Note that I already tested the roslaunch before implementing the robot_upstart and the rviz node CAN work with the lidar. It can display live update from lidar reading. I used multiple steps and tutorial to implement robot_upstart in the robot computer. First, I follow the step from this tutorial https://roboticsbackend.com/make-ros-... . I used this command to install my roslaunch to become: However, this only allow my ros nodes to be run in the background only. So no display at all from my HMI node and camera node. I then tried these steps: https://github.com/Khalaf90/robot_ups... and https://stackoverflow.com/questions/6.... This tutorial basically ask me to modified my roslaunch service which is named as agv_uia and this service file in produced from the robot_upstart command. I did as the tutorial did and below is my service file: This is the agv_uia.service file: Even when I edited this, RVIZ still can't worked with robot_startup. The error that I got was: |
| 2022-08-01 03:57:57 -0500 | answered a question | Why rviz crash when using robot_upstart? Hi all, I just want to update that I already solved this. Apparently, there is a syntax error for home environment. Bel |
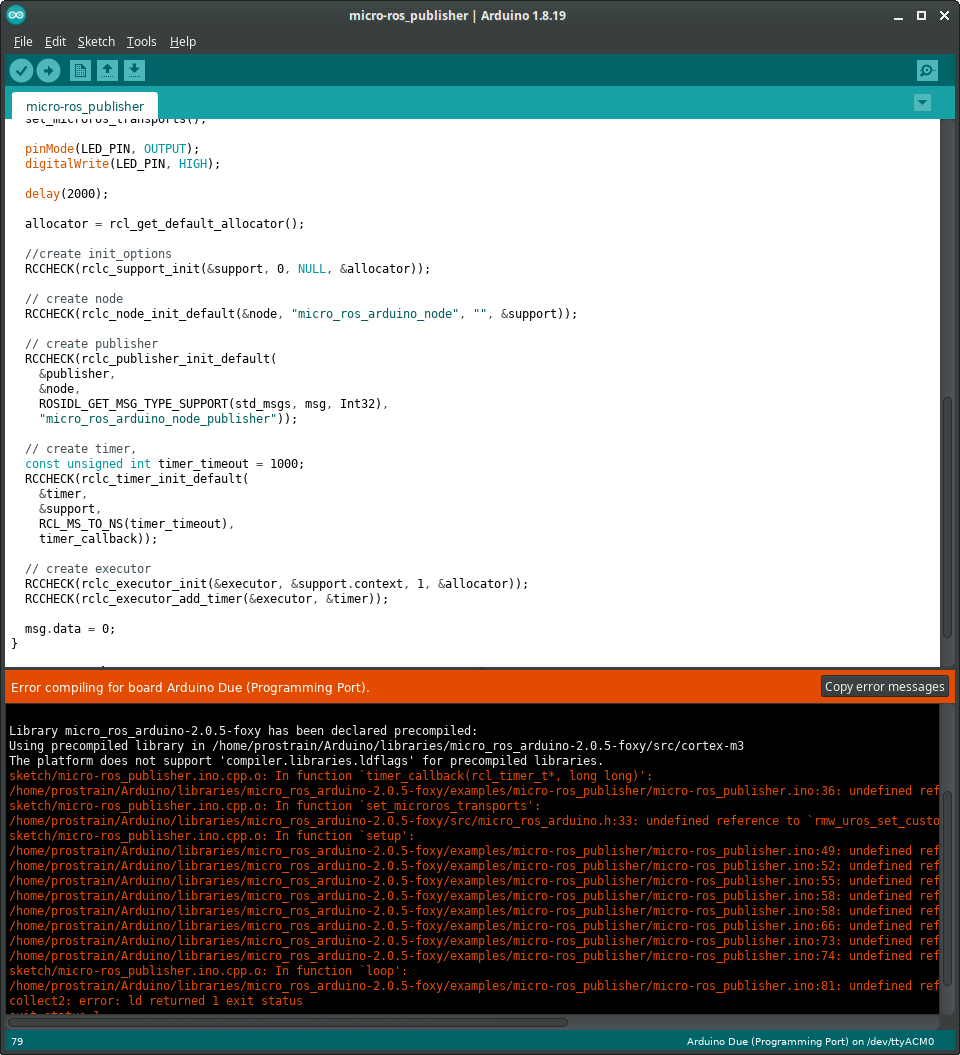
| 2022-07-28 10:49:41 -0500 | marked best answer | The platform does not support 'compiler.libraries.ldflags' for precompiled libraries. Hi everyone, A) My setup: Xubuntu 20.04, ROS2 Foxy, microros foxy 2.05, Arduino Due, Jetson Nano 4GB B) My question: I just trying out microROS with my Arduino Due. However, this error come out when I try to just compile without uploading the code. Note that I already successfully build microros workspace according to this guide: https://micro.ros.org/docs/tutorials/... Can anyone help?
C) What I have tried
D) Below is my platform.txt The location: /home/<username>/arduino/arduino-1.8.19/hardware/arduino/avr |
| 2022-07-28 10:49:33 -0500 | commented answer | The platform does not support 'compiler.libraries.ldflags' for precompiled libraries. Hi I found out that there is a similar issue based on #819 issue https://github.com/micro-ROS/micro_ros_arduino/issues/8 |
| 2022-07-28 08:14:36 -0500 | answered a question | microROS - rclc add subscription does not execute always the callback Hi, microros is only to be use with ROS2 Foxy and latest. As far I know, microros is not compatible with ROS2 Dashing. |
| 2022-07-28 08:11:06 -0500 | edited question | The platform does not support 'compiler.libraries.ldflags' for precompiled libraries. The platform does not support 'compiler.libraries.ldflags' for precompiled libraries. Hi everyone, A) My setup: Xubun |
| 2022-07-28 08:01:53 -0500 | asked a question | The platform does not support 'compiler.libraries.ldflags' for precompiled libraries. The platform does not support 'compiler.libraries.ldflags' for precompiled libraries. Hi everyone, A) My setup: Ubunt |
| 2022-06-17 23:46:45 -0500 | asked a question | Why rviz crash when using robot_upstart? Why rviz crash when using robot_upstart? Hi everyone, really need some help in getting rviz to work with robot_upstart. |
| 2022-06-17 23:19:38 -0500 | received badge | ● Famous Question (source) |
| 2022-06-17 23:19:38 -0500 | received badge | ● Notable Question (source) |
| 2022-03-02 01:57:22 -0500 | commented question | Can key_teleop be use with ROS Melodic and how can I install the package? I have updated the question with error message. Thank you. |
| 2022-03-02 01:57:22 -0500 | received badge | ● Commentator |
| 2022-03-02 01:56:57 -0500 | edited question | Can key_teleop be use with ROS Melodic and how can I install the package? Can key_teleop be use with ROS Melodic and how can I install the package? Hi everyone, I wanted to try to use the key_te |
| 2022-03-02 01:56:57 -0500 | received badge | ● Editor (source) |
| 2022-03-02 01:55:22 -0500 | edited question | Can key_teleop be use with ROS Melodic and how can I install the package? Can key_teleop be use with ROS Melodic and how can I install the package? Hi everyone, I wanted to try to use the key_te |
| 2022-03-02 01:33:58 -0500 | asked a question | Can key_teleop be use with ROS Melodic and how can I install the package? Can key_teleop be use with ROS Melodic and how can I install the package? Hi everyone, I wanted to try to use the key_te |
| 2022-02-23 04:21:20 -0500 | received badge | ● Popular Question (source) |
| 2022-02-15 22:31:29 -0500 | commented answer | rosdep cannot initialise Hi tfoote, thank you so much for pointing out the python version. I forgot that I changed the python default which is di |
| 2022-02-15 22:17:14 -0500 | marked best answer | rosdep cannot initialise System spec: Ubuntu 18.04 ROS Melodic Python 3.10.2 (when i run python --version) Jetson Xavier Description: I was following the official tutorial from ROS wiki on installing ROS Melodic but I having a problem when i tried to init rosdep. Installation of rosdep was not a problem. the result is as follows: However, the initialisation of rosdep return this: Hence, I suspect it is due to python version. I hope I could get a second opinion on this. |
| 2022-02-15 21:15:48 -0500 | asked a question | rosdep cannot initialise rosdep cannot initialise System spec: Ubuntu 18.04 ROS Melodic Python 3.10.2 (when i run python --version) Jetson Xav |
| 2021-05-05 08:47:25 -0500 | received badge | ● Student (source) |
| 2021-01-14 09:21:32 -0500 | marked best answer | How can we actually use Float32MultiArray to publish 2D array using Python? Hi, I am frustrated trying to understand the concept of Float32MultiArray. I have been reading the documentations from Float32MultiArray API , MultiArrayLayout and MultiArrayDimesion but I still don't get how to do it. Code examples are mostly in C++ (which makes me more confuse that I already am) and many of them conclude to just make their own message file. Some suggest to slice and combine the two arrays into one array then publish it. In the subscriber, the array will be then slice and split up accordingly. My array is a 2*4096 so it is hard for me to do that really. Note that I am a amateur programmer. Please help addressing my question regarding this message type so that the future amateur like me could learn better. My specifications is ROS Indigo, Python 2.7.6 and Ubuntu 14.04. Yeah my tools are old. My list of questions are as follows: 1) How do we publish and subscribe a Float32MultiArray (or any kind of MultiArray) in Python? What is the standard procedure or steps? From what I have read, I don't understand what is stride from MultiArrayDimesion ? Why do people use stride like this: What does this means mat.data[offset + i + dstride1*j] = num? 2) Can Float32MultiArray publish 2 array at the same time? I found answer from 2010 post saying that ROS doesn't support 2D message publishing. Is ROS supporting it now in 2019? 3) If I were to make my own message, *can I declare 2 or more array in my message? *Would that message type works? Does ROS support that? 4) Is there any *detail guide or video on using this message type apart from API that has so little explanation ? *I really want to understand about this message type. 5) Any suggestion so that I could publish 2*4096 array of signal amplitude and time (nanosec) for signal processing in my subscriber? I really hope any expert could address my questions. I think it is really related to ROS rather than my homework. The lack of documentation and examples in python really hinder me from understanding and overcoming this issue. Hope the answers to this question would benefit anyone who looking for the same answers. Thank you in advance. |
| 2019-12-10 22:29:25 -0500 | received badge | ● Taxonomist |
| 2019-11-13 00:58:42 -0500 | received badge | ● Famous Question (source) |
| 2019-08-29 09:34:17 -0500 | received badge | ● Famous Question (source) |
| 2019-08-29 09:34:17 -0500 | received badge | ● Notable Question (source) |
| 2019-07-19 12:37:59 -0500 | received badge | ● Notable Question (source) |
| 2019-06-19 20:57:09 -0500 | received badge | ● Enthusiast |
| 2019-06-18 02:06:14 -0500 | received badge | ● Popular Question (source) |
| 2019-06-17 17:47:34 -0500 | commented question | Why I got error "msg does not have header"? ah my bad, thank you for pointing that out |
| 2019-06-17 15:42:52 -0500 | asked a question | Why I got error "msg does not have header"? Why I got error "msg does not have header"? Hi, I try to make a custom message with header to get the timestamp because |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.