The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-02-11 07:46:01 -0500 | received badge | ● Nice Answer (source) |
| 2021-12-14 14:53:55 -0500 | received badge | ● Famous Question (source) |
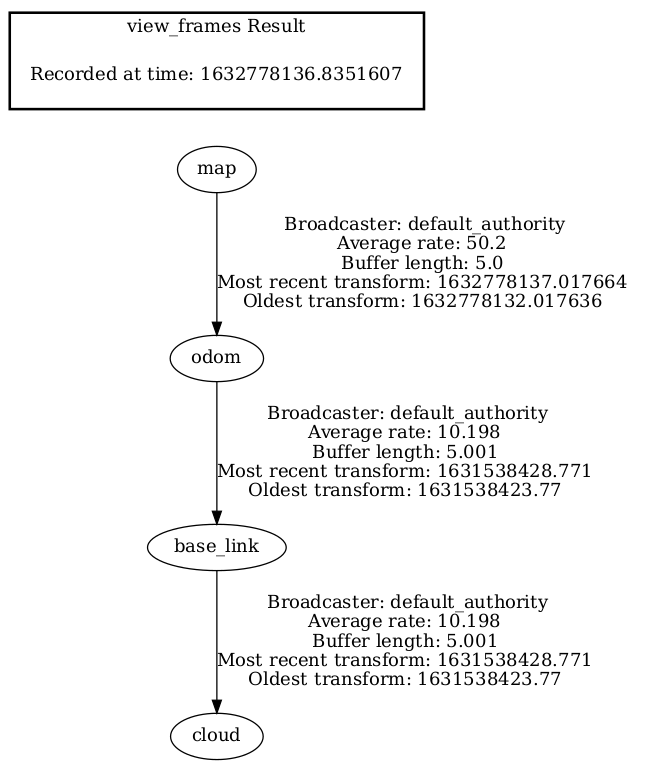
| 2021-11-22 02:33:51 -0500 | marked best answer | Mapping in slam_toolbox using bag files (ros2) I am using slam_toolbox (in ROS Foxy) to generate a map of an environment using bag files of recorded laserScan and odometry data. The map is successfully generated, however, while running the node and visualising the sensor data (in frame 'cluod') on rviz, I get the following error, The fixed frame is set to 'map'. Here is the tf_tree view from the tf2_tools view_frames.py program,
I interpret from the above image, that slam_toolbox is publishing the map->odom transformation with the current system timestamp, while the odom->base_link and base_link->cloud transforms have a past timestamp (from the time the bag was recorded) on them and it may be the cause of my issue. I could not find any help on how to use slam_toolbox with recorded bag files and have also checked all the possible launch files in the slam-toolbox (e.g. offline, async, sync, etc). There was not much help to be found in the official documentation of slam_toolbox as well. Would be nice if anyone who's worked on a similar problem before, could help out with this. |
| 2021-11-22 02:33:51 -0500 | received badge | ● Scholar (source) |
| 2021-11-22 02:33:36 -0500 | answered a question | Mapping in slam_toolbox using bag files (ros2) The documentation everywhere suggest using the use_sim_time parameter to synchronize the output of the slam_toolbox to t |
| 2021-11-22 02:27:53 -0500 | commented answer | Mapping in slam_toolbox using bag files (ros2) Yes, the timestamps are the same! |
| 2021-11-22 02:26:45 -0500 | commented question | Mapping in slam_toolbox using bag files (ros2) Hey, you are right. rosbag2 in foxy does not publish the clock. But even if you publish the clock, the foxy-devel distri |
| 2021-11-17 12:54:14 -0500 | received badge | ● Notable Question (source) |
| 2021-11-11 08:38:34 -0500 | received badge | ● Nice Question (source) |
| 2021-10-25 07:48:59 -0500 | received badge | ● Student (source) |
| 2021-10-25 07:48:47 -0500 | received badge | ● Popular Question (source) |
| 2021-09-28 08:39:09 -0500 | asked a question | Mapping in slam_toolbox using bag files (ros2) Mapping in slam_toolbox using bag files (ros2) I am using slam_toolbox (in ROS Foxy) to generate a map of an environment |
| 2020-12-29 01:45:31 -0500 | received badge | ● Self-Learner (source) |
| 2020-12-29 01:45:31 -0500 | received badge | ● Teacher (source) |
| 2019-12-20 04:11:58 -0500 | marked best answer | ModuleNotFoundError: No module named 'error' Hi, I am a beginner in Python, Ros and Ubuntu and am having difficulties in running the first program on ROS, i.e. listener.py I am running Ros melodic in Ubuntu 18.04 The following error report comes up on running "rosrun hello_world listener.py" The text in bold are the error messages and they seem to be something related to the version conflict in the multiple installations of python. Any help in resolving this matter would be appreciated Thanks. |
| 2019-06-20 05:39:21 -0500 | received badge | ● Supporter (source) |
| 2019-04-11 03:54:07 -0500 | received badge | ● Famous Question (source) |
| 2019-03-09 16:40:32 -0500 | received badge | ● Notable Question (source) |
| 2019-02-07 09:21:14 -0500 | received badge | ● Popular Question (source) |
| 2019-02-07 07:21:35 -0500 | commented question | ModuleNotFoundError: No module named 'error' The issue has been resolved. I checked the script and it had "#!/usr/bin/env python3" in it, changing it to "#!/usr/bin/ |
| 2019-02-07 06:26:35 -0500 | asked a question | ModuleNotFoundError: No module named 'error' ModuleNotFoundError: No module named 'error' Hi, I am a beginner in Python, Ros and Ubuntu and am having difficulties in |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.