The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-03-24 15:40:12 -0500 | received badge | ● Famous Question (source) |
| 2021-05-07 00:20:45 -0500 | received badge | ● Famous Question (source) |
| 2021-04-24 02:33:49 -0500 | received badge | ● Notable Question (source) |
| 2020-11-12 06:15:43 -0500 | received badge | ● Famous Question (source) |
| 2020-09-26 04:41:46 -0500 | received badge | ● Popular Question (source) |
| 2020-09-03 04:10:01 -0500 | commented question | Voxels disappear from local costmap_2d Yes, I've changed it. Post edited. |
| 2020-09-03 04:09:05 -0500 | edited question | Voxels disappear from local costmap_2d Voxels disappear from local costmap_2d HI, I'm using spatio-temporal-voxel-layer plugin to combine RGBD camera data into |
| 2020-09-02 11:29:05 -0500 | commented question | How to Link Camera Data to Specific Point in URDF Model? Could you add your tf_tree? |
| 2020-09-02 06:52:44 -0500 | asked a question | Voxels disappear from local costmap_2d Voxels disappear from local costmap_2d HI, I'm using spatio-temporal-voxel-layer plugin to combine RGBD camera data into |
| 2020-07-10 09:04:18 -0500 | received badge | ● Popular Question (source) |
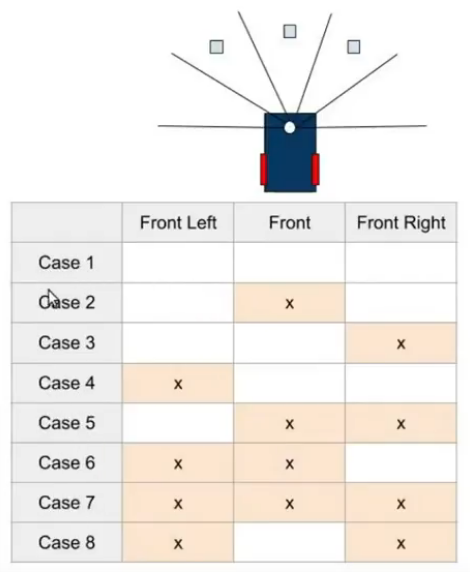
| 2020-07-03 06:37:49 -0500 | marked best answer | Reading data from the shifted laser, as if it was in the middle I have algorithms that use raw data from laser [-pi/2;pi/2]. Earlier, the laser was in the middle of the robot. Now it has been moved closer to the left front edge and rotated by pi/4. What is the best way to transform data from a shifted laser so that it would be visible like the laser was in the middle? I suppose, I have to use tf, but I don't know how exactly. I'm using ROS Kinetic. EDIT. One of the algorithm are used raw data from laser (LaserScan/ranges) for simple avoiding obstacles, that react different depending on the occupied area. I have one treshold that qualifies thing as an obstacle in area and return if its free or not. Very similar to this image:
And now the laser is shifted, and I want to use my old algorithm to work, as if it was in the middle. Know I'm using the law of cosines to change the tresholds, but maybe there is a way, to "just" tranform the data from laser. |
| 2020-07-03 06:37:49 -0500 | received badge | ● Scholar (source) |
| 2020-07-03 06:37:20 -0500 | received badge | ● Notable Question (source) |
| 2020-07-03 06:33:58 -0500 | asked a question | Running node on remote: using <machine> in local roslaunch vs login through ssh and run roslaunch on remote Running node on remote: using <machine> in local roslaunch vs login through ssh and run roslaunch on remote Hello |
| 2020-01-05 08:10:54 -0500 | marked best answer | Wrong base_link translation using ekf_localization_node Hello there! I wan't to use ekf_localization_node to fuse data from odom and IMU in my (2,0) class robot, but I have problem to set proper parameters. At first I wanted to check how covariance matrices affect the result based only on odometry data. And I have problem with translation. After starting all nodes, when I send linear velocity command it's fine. Also rotation works good. Problem occurs when I rotate robot from the starting pose and then say robot to move in the rotated direction. Frame base_link comming from ekf move in wrong direction. But the "raw" odometry from controler with encoders is good. Could you explain me, what am I doing wrong? Its hard to explain so I attached the rosbag. Below is my code, and rosbag containing: /robot_0/odom, /robot_0/odom_filtered/ and /cmd_vel. rosbag: https://drive.google.com/file/d/1CQanWBfs2-Z1P4hsT_xgxT77E0foy65c/view?usp=sharing Here is video showing how it looks like: https://www.youtube.com/watch?v=NjQIzocDBrQ&feature=youtu.be tf tree: https://imgur.com/Ir3Rhfe My launch: Example odom msg: |
| 2020-01-05 08:09:31 -0500 | received badge | ● Notable Question (source) |
| 2020-01-04 19:27:16 -0500 | answered a question | Wrong base_link translation using ekf_localization_node After few hours of starring at my code I've found a problem in the motor controller node. The bug was in velocity in odo |
| 2019-12-27 08:20:16 -0500 | answered a question | process same callback from topics under different namespaces Robot knows when it finish the path, so can save internally it's current status and ignore all new nav goals until it re |
| 2019-12-27 08:20:16 -0500 | received badge | ● Rapid Responder (source) |
| 2019-12-23 06:15:47 -0500 | edited question | Wrong base_link translation using ekf_localization_node Wrong base_link translation using ekf_localization_node Hello there! I wan't to use ekf_localization_node to fuse data f |
| 2019-12-23 06:15:08 -0500 | edited question | Wrong base_link translation using ekf_localization_node Wrong base_link translation using ekf_localization_node Hello there! I wan't to use ekf_localization_node to fuse data f |
| 2019-12-23 06:09:37 -0500 | edited question | Wrong base_link translation using ekf_localization_node Wrong base_link translation using ekf_localization_node Hello there! I wan't to use ekf_localization_node to fuse data f |
| 2019-12-23 05:41:22 -0500 | edited question | Wrong base_link translation using ekf_localization_node Wrong base_link translation using ekf_localization_node Hello there! I wan't to use ekf_localization_node to fuse data f |
| 2019-12-22 05:18:31 -0500 | received badge | ● Popular Question (source) |
| 2019-12-22 05:17:59 -0500 | received badge | ● Enthusiast |
| 2019-12-21 13:27:34 -0500 | edited question | Wrong base_link translation using ekf_localization_node Wrong base_link translation using ekf_localization_node Hello there! I wan't to use ekf_localization_node to fuse data f |
| 2019-12-21 13:25:07 -0500 | edited question | Wrong base_link translation using ekf_localization_node Wrong base_link translation using ekf_localization_node Hello there! I wan't to use ekf_localization_node to fuse data f |
| 2019-12-21 13:23:34 -0500 | asked a question | Wrong base_link translation using ekf_localization_node Wrong base_link translation using ekf_localization_node Hello there! I wan't to use ekf_localization_node to fuse data f |
| 2019-02-05 03:21:24 -0500 | received badge | ● Popular Question (source) |
| 2019-02-05 01:26:43 -0500 | edited question | Reading data from the shifted laser, as if it was in the middle Reading data from the shifted laser, as if it was in the middle I have algorithms that use raw data from laser [-pi/2;pi |
| 2019-02-05 01:26:43 -0500 | received badge | ● Editor (source) |
| 2019-02-04 16:51:13 -0500 | commented question | Reading data from the shifted laser, as if it was in the middle I've added some description. |
| 2019-02-04 16:50:58 -0500 | edited question | Reading data from the shifted laser, as if it was in the middle Reading data from the shifted laser, as if it was in the middle I have algorithms that use raw data from laser [-pi/2;pi |
| 2019-02-04 08:21:19 -0500 | asked a question | Reading data from the shifted laser, as if it was in the middle Reading data from the shifted laser, as if it was in the middle I have algorithms that use raw data from laser [-pi/2;pi |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.