The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-10-05 05:27:36 -0500 | received badge | ● Famous Question (source) |
| 2021-10-05 05:43:39 -0500 | received badge | ● Famous Question (source) |
| 2021-03-02 01:56:40 -0500 | received badge | ● Popular Question (source) |
| 2021-03-02 01:56:40 -0500 | received badge | ● Notable Question (source) |
| 2020-10-12 11:44:44 -0500 | received badge | ● Famous Question (source) |
| 2020-09-18 10:45:16 -0500 | received badge | ● Famous Question (source) |
| 2020-05-01 22:00:26 -0500 | received badge | ● Notable Question (source) |
| 2020-05-01 22:00:26 -0500 | received badge | ● Popular Question (source) |
| 2020-04-29 06:47:54 -0500 | received badge | ● Famous Question (source) |
| 2020-04-23 04:08:57 -0500 | received badge | ● Famous Question (source) |
| 2020-03-31 03:26:23 -0500 | asked a question | Are there any packages or libraries that perform object detection and grasping with trajectory and arm pose computations? Are there any packages or libraries that perform object detection and grasping with trajectory and arm pose computations |
| 2020-02-27 10:48:09 -0500 | received badge | ● Famous Question (source) |
| 2020-01-16 03:34:37 -0500 | received badge | ● Famous Question (source) |
| 2020-01-16 03:34:37 -0500 | received badge | ● Notable Question (source) |
| 2019-12-31 12:04:02 -0500 | received badge | ● Notable Question (source) |
| 2019-12-18 05:19:52 -0500 | commented question | Path not found when passing through doors Was this issue solved? if so, can anyone post their solution here? Would be helpful. |
| 2019-12-09 01:15:18 -0500 | commented answer | Path planned through unmapped region for goal present inside map. Exactly. This is what I was trying out the other day after checking about the global planner Here on the Wiki page. ht |
| 2019-12-06 01:45:51 -0500 | answered a question | Problem in measuring the width of obstacles using LiDAR A roughly working approach which I followed uses basic trigonometry and knowing the angular resolution of the LiDAR used |
| 2019-12-06 00:21:46 -0500 | commented answer | Path planned through unmapped region for goal present inside map. Exactly. This is what I was trying out the other day after checking about the global planner Here on the Wiki page. ht |
| 2019-12-06 00:21:12 -0500 | commented answer | Path planned through unmapped region for goal present inside map. Exactly. This is what I was trying out the other day after checking about the global planner Here on the Wiki page. ht |
| 2019-12-06 00:20:54 -0500 | commented answer | Path planned through unmapped region for goal present inside map. Exactly. This is what I was trying out the other day after checking about the global planner Here on the Wiki page. ht |
| 2019-12-06 00:20:18 -0500 | commented answer | Path planned through unmapped region for goal present inside map. Exactly. This is what I was trying out the other day after checking about the global planner Here on the Wiki page. ht |
| 2019-12-06 00:16:57 -0500 | commented answer | Path planned through unmapped region for goal present inside map. Exactly. This is what I was trying out the other day after checking about the global planner Here on the Wiki page. ht |
| 2019-12-05 13:11:45 -0500 | received badge | ● Popular Question (source) |
| 2019-12-05 05:25:02 -0500 | edited question | Path planned through unmapped region for goal present inside map. Path planned through unmapped region for goal present inside map. could someone explain why sometines the global path pl |
| 2019-12-05 05:20:27 -0500 | commented answer | Path planned through unmapped region for goal present inside map. @Jordan Yeah you're right about the parameter. In-fact i had taken care of that earlier by changing the default value th |
| 2019-12-05 05:11:35 -0500 | marked best answer | Path planned through unmapped region for goal present inside map. could someone explain why sometines the global path planned by the robot for navigation ventures into the unmapped region?
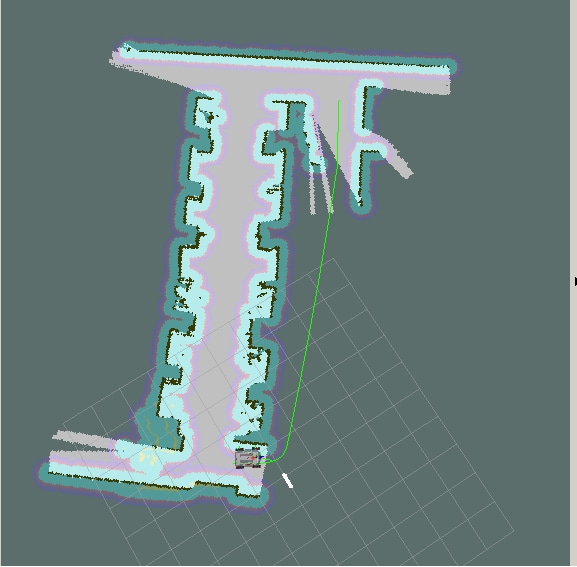
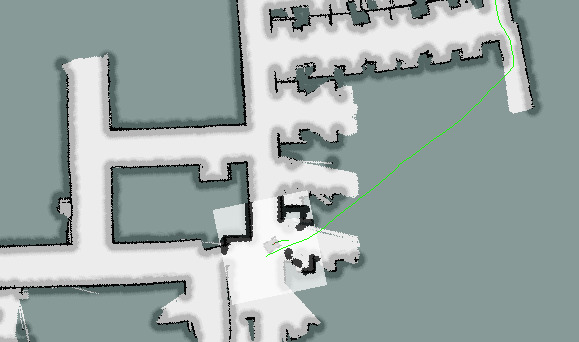
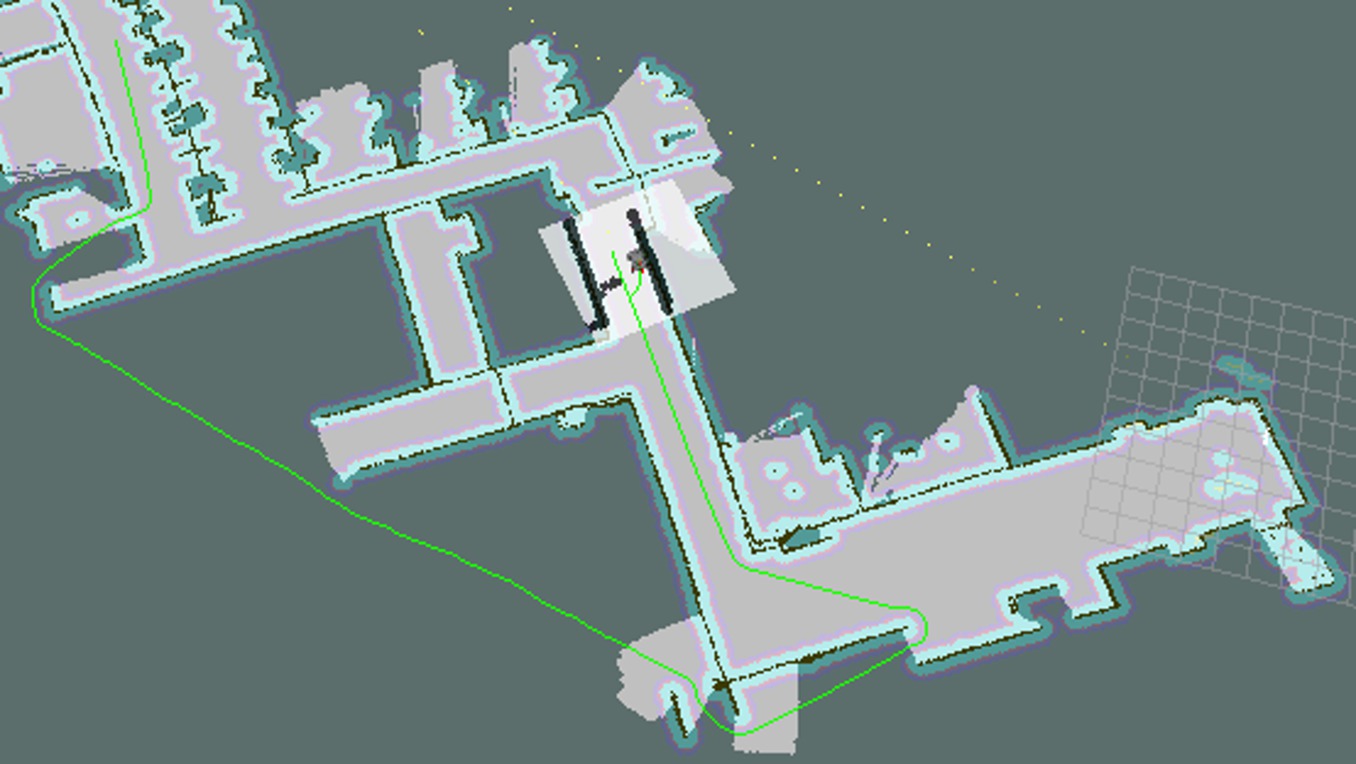
Images of the path planned to the goal are attached below.
The planned path is in green.
Through normal understanding, the global planner plans the shortest path in the mapped region and wouldn't traverse the unmapped region even if the goal point appears much closer through this. Is there a way to correct this apart from editing the map? Global planner : NavfnROS Local planner : TrajectoryPlannerROS OS: Ubuntu 14.04. ROS: Indigo. Thank you. Edit:
|
| 2019-11-26 06:21:03 -0500 | edited question | Path planned through unmapped region for goal present inside map. Path planned in unmapped region for goal present inside map. could someone explain why sometines the global path planned |
| 2019-11-26 06:20:23 -0500 | asked a question | Path planned through unmapped region for goal present inside map. Path planned in unmapped region for goal present inside map. could someone explain why sometines the global path planned |
| 2019-11-11 17:02:42 -0500 | received badge | ● Notable Question (source) |
| 2019-11-09 06:22:13 -0500 | received badge | ● Notable Question (source) |
| 2019-11-09 06:22:13 -0500 | received badge | ● Popular Question (source) |
| 2019-11-09 06:22:01 -0500 | received badge | ● Notable Question (source) |
| 2019-11-09 06:22:01 -0500 | received badge | ● Popular Question (source) |
| 2019-11-09 06:22:01 -0500 | received badge | ● Famous Question (source) |
| 2019-11-07 04:38:03 -0500 | asked a question | Problem in measuring the width of obstacles using LiDAR Problem in measuring the width of obstacles using LiDAR I'm using a Hokuyo UTM-30LX lidar on a mobile robot to measure t |
| 2019-10-22 07:47:31 -0500 | received badge | ● Notable Question (source) |
| 2019-10-22 07:47:31 -0500 | received badge | ● Famous Question (source) |
| 2019-10-08 20:49:48 -0500 | received badge | ● Favorite Question (source) |
| 2019-10-08 20:47:44 -0500 | received badge | ● Famous Question (source) |
| 2019-10-08 11:35:28 -0500 | received badge | ● Notable Question (source) |
| 2019-09-18 02:17:48 -0500 | received badge | ● Popular Question (source) |
| 2019-09-11 07:55:08 -0500 | commented answer | Inaccuracy in 2D map navigation. Yeah that's true. I have adjusted it accordingly after performing multiple tests. I even went through the ROS navigation |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.