The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-06-12 10:52:58 -0500 | marked best answer | Cannot compile a msg file I want to compile a ros2 msg file and my packages.xml looks like this: And part of my CMakeLists: But in the end I am getting this error: Where the Info.msg is: Also, I have tried to look for the pcl_ros in ROS2 but did not find anything. Any idea how people deal with it in ROS2? |
| 2023-06-01 14:44:35 -0500 | marked best answer | Cannot create a rclcpp::spin function Hi all, I am having a trouble in publishing and subscribing the node at the same time. More specifically, I am having an issue to pass the shared_ptr to the rclcpp::spin function. Here is my function inside my class: As you can see, the object itself inherits from rclcpp::Node class and this is a node instance. I have tried to use the first (uncommented) choice but it would not compile saying that the variable is private in this context (not sure what private there exactly). I have also tried to pass shared_from_this but during the runtime it crashes saying that it is a bad_weak_ptr. |
| 2023-05-02 15:33:51 -0500 | marked best answer | what(): bad_weak_ptr I have a constructor which looks like this: And I also have the loop function of that class: Whenever I run I get an error that I have a bad_weak_ptr. I have tried to declare and initialzie the shared_ptr in my update function: But I get an error: |
| 2023-04-21 02:32:14 -0500 | received badge | ● Famous Question (source) |
| 2023-04-19 11:03:09 -0500 | marked best answer | Wrong constructor in ROS2 I am trying to create a constructor for my odom node but for some reason I keep getting the strange error: The thing is that I am not even trying to pass the rclcpp::TimeSource but my compiler thinks so. I think i managed to follow the variable declaration = variable initialization order, so for example in my header: And my cpp file: |
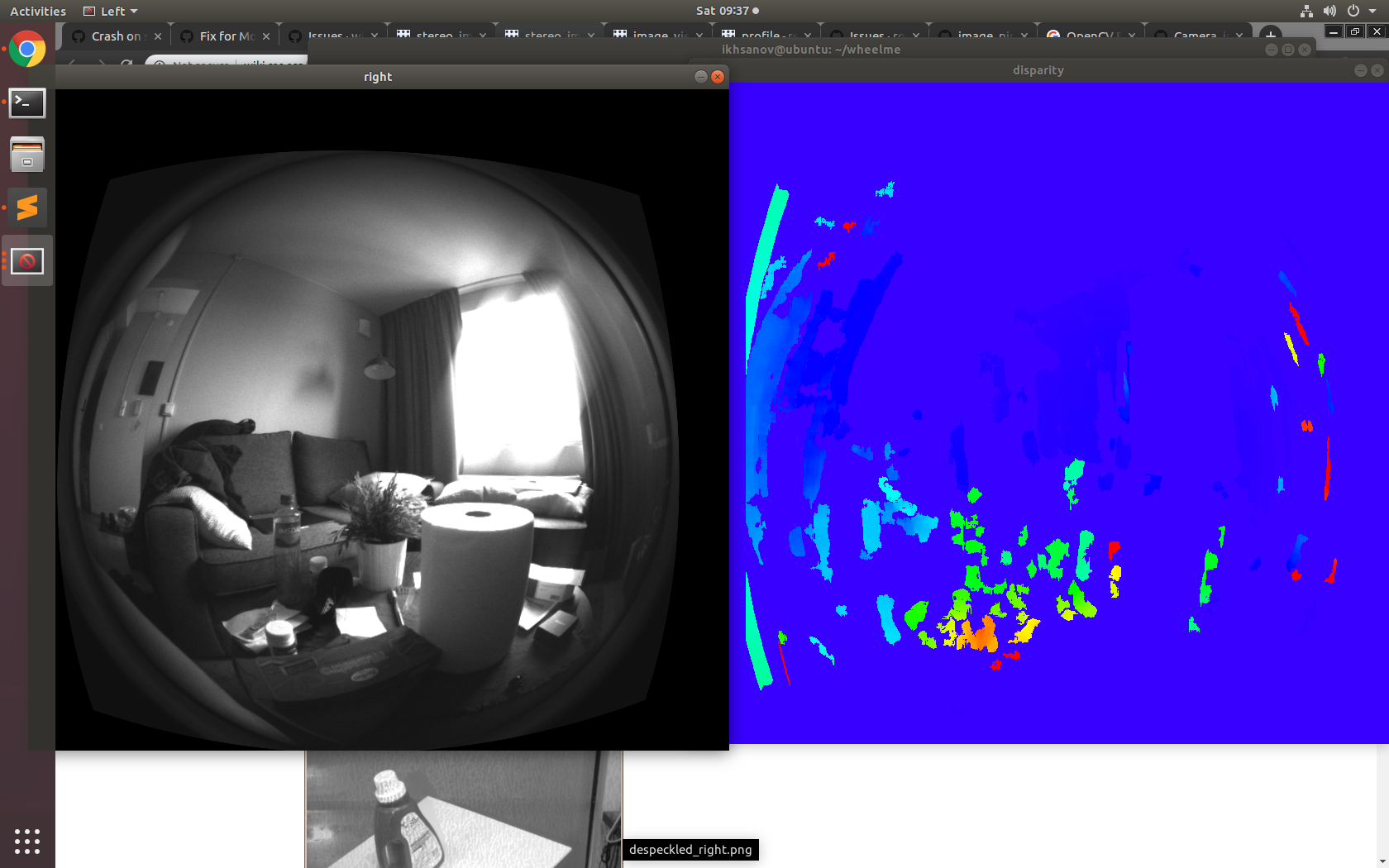
| 2022-10-12 04:52:31 -0500 | marked best answer | Does stereo_proc undistort images? I have tried to use the image_pipeline stereo_image_proc to get the rectified images. The question is, when stereo_image_proc produces image_rect images, should they be undistorted? Have a look at my screenshot:
I have given the distortion matrix to the topic and I have tried to undistort the images myself and quite happy with it. |
| 2022-10-12 04:43:16 -0500 | marked best answer | All spaces are occupied using RTABmap stereo Hi, I am trying to map the area using the stereo camera and after looking at produced map, all the cells are black, meaning occupied. I have tried to figure out for 2 days but still struggling to understand the reason. Will it be possibe for someone to have a look at my database? I clearly doing something wrong. Also, as soon as I start RTABmap, the framerate drops to 20 hz from 30 hz and the images lag. My RTAB database: https://drive.google.com/file/d/1sSgH... |
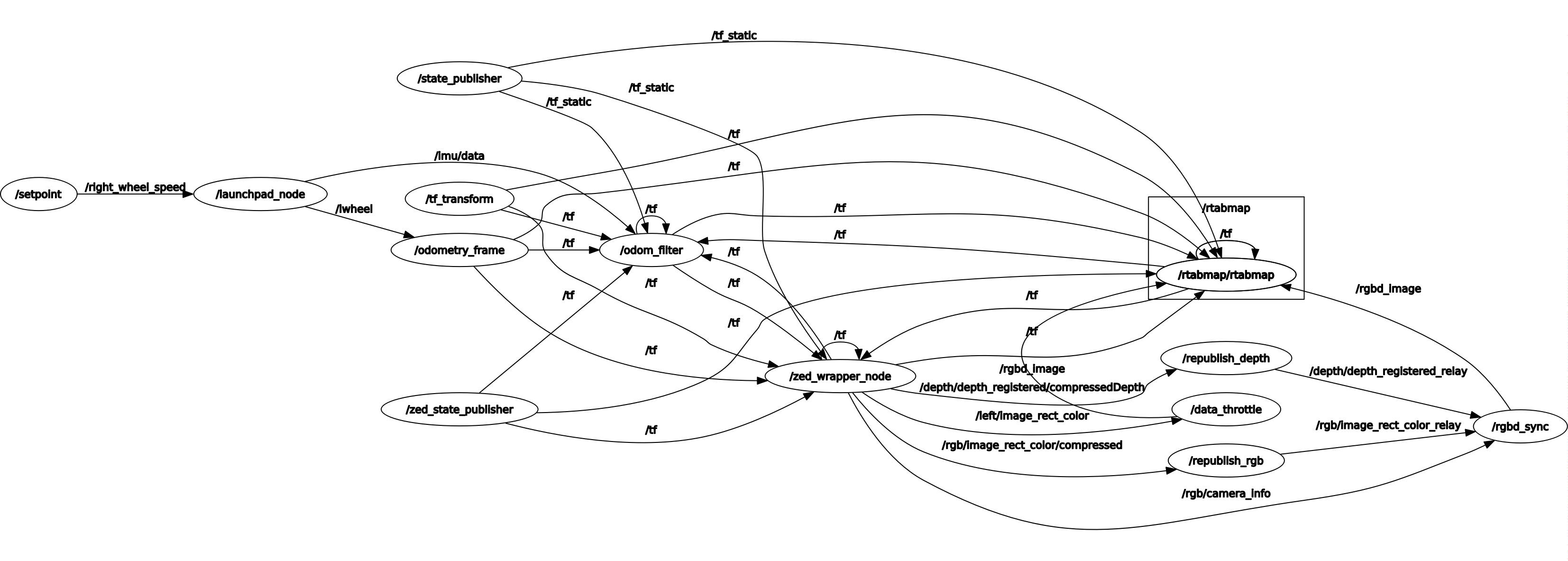
| 2022-10-12 04:35:37 -0500 | marked best answer | Why does RTABmap subscribing to my other TF? I have noticed some problem. When I launch RTABmap, it subscribes to my noisy_odom TF and also subscribes to filtered_odom TF and I think it makes my map being messy and sometimes I get this warning: Which I guess means that RTABmap also does the visual odom which I do not want as it messes my map (even though I did not start that node). So here is my RQT_GRAPH:
And in SVG format: https://drive.google.com/open?id=1yPJ... My RTAB database if needed: https://drive.google.com/file/d/1WcAd... And finally this is how I launch my RTABmap (note that on my remote robot I launch rtabmap/stere_sync and it sends rgbd_image topic): |
| 2022-10-12 04:35:33 -0500 | marked best answer | What is the difference between velocity and effort? I am writing a hardware interface for my 4 wheel differential robot and I came up with this tutorial: https://github.com/ros-controls/ros_c... I understood everything except I am confused with the effort variable. Is that the PWM to the motor from 0 to 100%? If yes, why does the interface need veloicty variable? Does it mean that the controller handles PID? By reading the velocity and effort from the motor it finds the optimal effort to send to obtain a specific cmd_vel? |
| 2022-09-01 05:37:55 -0500 | received badge | ● Notable Question (source) |
| 2022-09-01 05:37:55 -0500 | received badge | ● Famous Question (source) |
| 2022-09-01 05:37:55 -0500 | received badge | ● Popular Question (source) |
| 2022-05-16 18:46:31 -0500 | received badge | ● Famous Question (source) |
| 2021-12-19 14:57:36 -0500 | received badge | ● Famous Question (source) |
| 2021-12-03 02:40:38 -0500 | received badge | ● Popular Question (source) |
| 2021-12-03 02:40:38 -0500 | received badge | ● Famous Question (source) |
| 2021-12-03 02:40:38 -0500 | received badge | ● Notable Question (source) |
| 2021-11-20 04:48:04 -0500 | received badge | ● Famous Question (source) |
| 2021-07-26 10:06:29 -0500 | received badge | ● Nice Question (source) |
| 2021-05-05 08:16:42 -0500 | received badge | ● Famous Question (source) |
| 2021-05-05 08:16:42 -0500 | received badge | ● Notable Question (source) |
| 2021-04-12 08:27:07 -0500 | received badge | ● Popular Question (source) |
| 2021-02-24 04:26:55 -0500 | received badge | ● Famous Question (source) |
| 2021-02-19 18:44:19 -0500 | received badge | ● Famous Question (source) |
| 2021-01-14 04:37:28 -0500 | received badge | ● Notable Question (source) |
| 2021-01-14 04:37:28 -0500 | received badge | ● Famous Question (source) |
| 2020-12-18 13:40:18 -0500 | marked best answer | Localising using RTABmap without LiDAR Hi, I have created a map using the depth camera (mono depth camera) and 2d Lidar. When I do the localisation, I will not have my LiDAR, so is it still possible to localise with only the depth camera? As bag-of-words should be saved anyway. Also, I have tried to localize the robot using the depth camera but for some reason, rtabmap waits for the scan topic to be updated even though I have set subscribe_scan to False. Here is my database: https://drive.google.com/open?id=1uNq... May be you can suggest me something? Also (if relevant), during the SLAM, I was getting these warnings and erros: |
| 2020-12-18 13:33:26 -0500 | marked best answer | RTABmap corrupted database Everytime when I perfrom SLAM with RTABMAP, I get a map with some warning like: But when I start the localization part (on a 2nd time), the database gets corrupted and I get this error everytime: How can I fix it? |
| 2020-12-18 13:33:19 -0500 | marked best answer | RTABmap deletes half of my map Hi, When I am doing SLAM using RTABmap, at half point, I got half of my map and rtabmap deleted some of my map for some reason, why is that? I have uplodade the database here: https://drive.google.com/file/d/15oVJ... Also, how can I set an initial point during the localization? As rtabmap does not localize sometimes and if I click on 2dposeestimate button, nothing happens. The last question is, how can I reduce the resolution of my map? |
| 2020-12-18 13:31:50 -0500 | received badge | ● Famous Question (source) |
| 2020-12-18 13:30:31 -0500 | marked best answer | Unreliable UART communication in C++ I have written a small code in C++ that reads the data in serial port and sometimes writes to the serial port when the callback is being called. I am using this library in C++ for the serial communication: http://wjwwood.io/serial/doc/1.1.0/in... The problem I have is that sometimes the serial port stops writing to the data (does not happen often but happens) and also I need to write twice to the serial port in order for the data to be changed in the serial. For debugging purposes, I have added outputs that shows the data that has been read and the data that has been written. Here is my code: The code always runs in the run() function and pauses when the callback happens. The only data in the serial for now is: !s 23 where 23 is any integer and I am simply writing to change the integer when callback is being called. So what can be wrong with my code? Why do I need to call the callback twice in order to change the data in the serial and why does sometime the writing does not happen (my assumption is that the while loop gets stuck)? Is it due to the subscriber issue? Cannot figure out |
| 2020-12-18 13:28:06 -0500 | marked best answer | Using PCL and Laser as obstacle_layer (RTABmap obstacles_detection) How can I use both Laser and PCL from obstacles_detection node to view the obstacles in the local costmap? If i put the local_costmap like this: I get the laser obstacles but not get the PCL obstacles. If I remove that plugin, I do not get the laser obstacles but get the PCL obstacles. |
| 2020-12-18 13:25:57 -0500 | marked best answer | RTABmap localization error I recently got this error while localizing with RTABmap: What is the reason behind it and how can I avoid it? |
| 2020-12-18 13:25:30 -0500 | received badge | ● Famous Question (source) |
| 2020-12-18 12:55:42 -0500 | marked best answer | How can I use radar for the obstacle detection? How can I use the radar in my local_costmap_params to detect the obstacles? I am displaying data in mm in topic /radar. |
| 2020-11-23 10:31:37 -0500 | received badge | ● Famous Question (source) |
| 2020-11-15 06:35:49 -0500 | received badge | ● Famous Question (source) |
| 2020-11-13 06:45:41 -0500 | received badge | ● Notable Question (source) |
| 2020-11-13 06:45:41 -0500 | received badge | ● Famous Question (source) |
| 2020-10-27 03:29:16 -0500 | received badge | ● Critic (source) |
| 2020-10-22 02:10:40 -0500 | commented answer | Global planner ignores footprint Also I am commenting here last time for any future people that will come up with the similar problem: Do the sanity che |
| 2020-10-22 02:08:23 -0500 | commented answer | Global planner ignores footprint @JackB Yes that is exactly the reason why you keep answering to these question, surely it is my improper usage of the pl |
| 2020-10-16 10:24:30 -0500 | received badge | ● Notable Question (source) |
| 2020-10-15 11:45:21 -0500 | commented answer | Global planner ignores footprint @JackB Did I tell something about ROS? ROS is not the global planner, I believe you should educate yourself :) I just me |
| 2020-10-15 11:44:09 -0500 | received badge | ● Popular Question (source) |
| 2020-10-15 09:26:54 -0500 | commented answer | Global planner ignores footprint I just read the answer. What a shitty planner then this global planner in ROS, unbelievable and no documentation that st |
| 2020-10-15 09:13:37 -0500 | commented question | Global planner ignores footprint @JackB Look at my footprint (green rectangle) and look the path. There is no way that this big robot can squeeze inbetwe |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.