
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
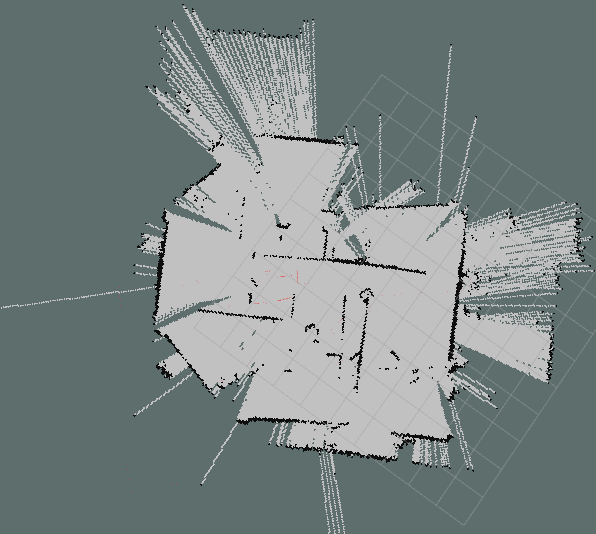
| 2022-10-12 04:39:35 -0500 | marked best answer | Map rotation in rviz during gmapping Hello guys, I am running the gmapping algorithm with the required transforms and the scan and odom topics using rplidar. While i am able to get the map, whenever i turn the map also turns in rviz creating some overlap between two different maps. I dont know if any of the gmapping parameters or robot_localization ekf paramaters need to be changed. It would be very helpful if someone can point this out. Also, i am not sure if there is an option in rviz or something to do this either. I would be happy to provide with any other information that is required. Here is my ekf launch file parameters in a yaml file.C:\fakepath\rl_param.png frequency: 50 two_d_mode: true diagnostics_agg: true odom0: /raw_odom odom0_config: [false, false, false, false, false, false, true, true, false, false, false, true, false, false, false] odom0_differential: true odom0_relative: false imu0: /imu/data imu0_config: [false, false, false, false, false, true, false, false, false, false, false, true, false, false, false] imu0_differential: true imu0_relative: true odom_frame: odom base_link_frame: base_link world_frame: odom
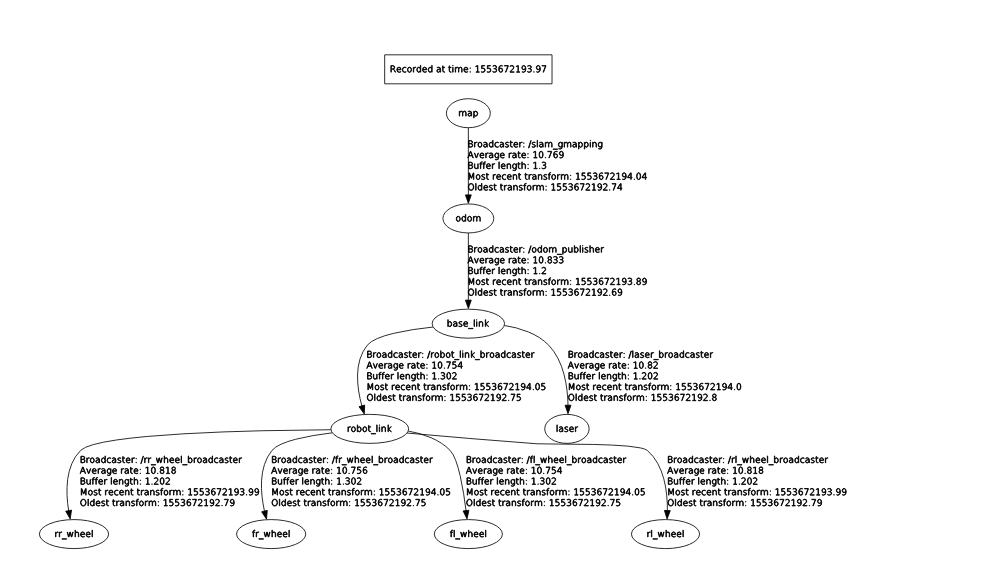
The laser scan in rviz also rotates not just when i turn the robot but also when im moving it forward or backward. Looks like there is some odom or tf issue as billy suggested. Please help me diagnose it. What do i need to check other than tf_tree. Here is my tf_tree
|
| 2021-01-20 09:47:56 -0500 | received badge | ● Famous Question (source) |
| 2020-10-02 16:52:23 -0500 | received badge | ● Famous Question (source) |
| 2020-09-10 09:56:03 -0500 | received badge | ● Notable Question (source) |
| 2020-04-10 08:04:50 -0500 | answered a question | websocket connection failed Hi, this worked for me. Give it a try! https://answers.ros.org/question/348079/cant-establish-connection-to-web-server-u |
| 2020-04-10 08:04:02 -0500 | answered a question | Robot Web Tools -> Map Visualisation Problem Hi, this worked for me. https://answers.ros.org/question/348079/cant-establish-connection-to-web-server-using-rosbridge/ |
| 2020-04-10 07:24:12 -0500 | commented question | Robot Web Tools -> Map Visualisation Problem Hello everyone, I have the same problem. Was anybody able to solve it? |
| 2020-04-10 07:01:02 -0500 | commented question | websocket connection failed Hey, were you able to figure out how to solve this error? I have the same error. Thanks. |
| 2020-02-04 23:53:26 -0500 | received badge | ● Popular Question (source) |
| 2020-02-03 05:17:08 -0500 | commented question | Obstacle avoidance with navigation stack without map! Hey, Were you able to figure out how to approach this? I appreciate your thoughts. |
| 2020-02-03 00:39:58 -0500 | marked best answer | Converting encoder ticks to motor control on RPi Hello, I wanted to control my robot using teleop_twist_keyboard so that i can move it around for gmapping. I have an odometry source in the form of wheel encoders and a LIDAR. I have found a node that takes a Twist message and converts into number of encoder ticks that are to be actuated. I am having difficulty converting these ticks back into wheel motion. Can someone please suggest any source that might help or another way to approach this problem? |
| 2020-02-03 00:37:06 -0500 | marked best answer | Communication occurs only one way between devices Hello, I am using the talker and listener nodes to check that the communication occurs between my raspberry pi and my system. I am running Kinetic in the system and using ubiquity robotics image in the RPi which has ROS pre-installed. I am only able to send data from the RPi to the system but not vice-versa. Here are the setup lines in my .bashrc files: In System In RPi (Master) Here are my etc/hosts files In System In RPi I have also included the rqt_graphs. When i run talker on the Pi and listener on the system, i can echo the /chatter topic. But when I do the reverse, i cannot observe anything in the topic. This are the errors I get when i run roswtf |
| 2020-02-03 00:37:05 -0500 | received badge | ● Scholar (source) |
| 2020-02-03 00:36:52 -0500 | answered a question | Communication occurs only one way between devices It was a firewall problem. Thanks guys. |
| 2020-02-03 00:33:43 -0500 | asked a question | Lidar not aligning with the map during rotation Lidar not aligning with the map during rotation Hello, When i have linear translation, my lidar points and existing map |
| 2020-01-13 08:58:31 -0500 | received badge | ● Favorite Question (source) |
| 2019-12-03 23:21:38 -0500 | edited answer | sudo apt-get install ros-kinetic-ros-tutorials Did you try running sudo apt-get update You can also check the sources list for ROS through this command. cat /etc/a |
| 2019-12-03 23:17:13 -0500 | answered a question | sudo apt-get install ros-kinetic-ros-tutorials Did you try running sudo apt-get update? |
| 2019-12-02 07:11:45 -0500 | commented answer | How to create a launch file? To fix this error: roslaunch beginner_tutorials turtlemimic.launch [beginner_tutorials] is not a package or launch fil |
| 2019-12-02 07:04:48 -0500 | received badge | ● Supporter (source) |
| 2019-12-02 06:52:39 -0500 | answered a question | Running ROS multimaster on 2 different devices I am not sure if I understood your question right but you cannot have two masters running at once. You can only have one |
| 2019-11-21 04:57:33 -0500 | commented answer | How to include a .launch file on a remote machine from a .launch file? I was able to launch a node remotely and that node was not installed locally. However, I am observing a problem with lau |
| 2019-11-17 15:41:55 -0500 | received badge | ● Notable Question (source) |
| 2019-11-03 01:43:48 -0500 | received badge | ● Popular Question (source) |
| 2019-08-27 00:53:00 -0500 | commented answer | Communication occurs only one way between devices I am using the roscore command in the terminal to run roscore. It shows "started roslaunch server http://127.20.10.9:39 |
| 2019-08-26 07:29:22 -0500 | commented answer | Communication occurs only one way between devices Hi, I have followed what you suggested. I found out the hostname of both the devices in /etc/hostname and changed the RO |
| 2019-08-26 05:35:25 -0500 | commented question | Communication occurs only one way between devices Yes, I do have a roscore running on the raspberry |
| 2019-08-26 05:23:02 -0500 | edited question | Communication occurs only one way between devices Communication occurs only one way between devices Hello, I am using the talker and listener nodes to check that the com |
| 2019-08-26 05:22:45 -0500 | edited question | Communication occurs only one way between devices Communication occurs only one way between devices Hello, I am using the talker and listener nodes to check that the com |
| 2019-08-26 05:08:38 -0500 | asked a question | Communication occurs only one way between devices Communication occurs only one way between devices Hello, I am using the talker and listener nodes to check that the com |
| 2019-04-17 11:38:24 -0500 | received badge | ● Famous Question (source) |
| 2019-04-15 02:08:06 -0500 | received badge | ● Famous Question (source) |
| 2019-03-28 02:43:47 -0500 | received badge | ● Notable Question (source) |
| 2019-03-28 02:24:30 -0500 | edited question | Map rotation in rviz during gmapping Map rotation in rviz during gmapping Hello guys, I am running the gmapping algorithm with the required transforms and t |
| 2019-03-28 02:24:13 -0500 | received badge | ● Commentator |
| 2019-03-28 02:24:13 -0500 | commented question | Map rotation in rviz during gmapping You are right billy, the laser scan is also rotating. I have updated the question. |
| 2019-03-28 02:24:09 -0500 | edited question | Map rotation in rviz during gmapping Map rotation in rviz during gmapping Hello guys, I am running the gmapping algorithm with the required transforms and t |
| 2019-03-28 02:22:09 -0500 | edited question | Map rotation in rviz during gmapping Map rotation in rviz during gmapping Hello guys, I am running the gmapping algorithm with the required transforms and t |
| 2019-03-27 10:33:48 -0500 | received badge | ● Popular Question (source) |
| 2019-03-27 07:47:12 -0500 | edited question | Map rotation in rviz during gmapping Map rotation in rviz during gmapping Hello guys, I am running the gmapping algorithm with the required transforms and t |
| 2019-03-27 07:46:37 -0500 | commented question | Map rotation in rviz during gmapping I have updated the question with the text. Thank you for the suggestion. |
| 2019-03-27 07:45:41 -0500 | edited question | Map rotation in rviz during gmapping Map rotation in rviz during gmapping Hello guys, I am running the gmapping algorithm with the required transforms and t |
| 2019-03-27 07:43:08 -0500 | edited question | Map rotation in rviz during gmapping Map rotation in rviz during gmapping Hello guys, I am running the gmapping algorithm with the required transforms and t |
| 2019-03-27 07:20:25 -0500 | received badge | ● Famous Question (source) |
| 2019-03-27 05:59:58 -0500 | commented question | gmapping setup problem Hello, were you able to figure out what those messages mean. I am facing the same issue right now? Thank you. |
| 2019-03-27 05:39:24 -0500 | asked a question | Map rotation in rviz during gmapping Map rotation in rviz during gmapping Hello guys, I am running the gmapping algorithm with the required transforms and t |
| 2019-03-27 05:27:06 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}
{kind=link}
{kind=link}