The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-03-10 00:58:40 -0500 | received badge | ● Famous Question (source) |
| 2023-03-10 00:58:40 -0500 | received badge | ● Notable Question (source) |
| 2022-07-07 05:28:23 -0500 | commented answer | How does gmapping detect loop closure? Doesn't seem to work well. What value of Neff do you think is ok? |
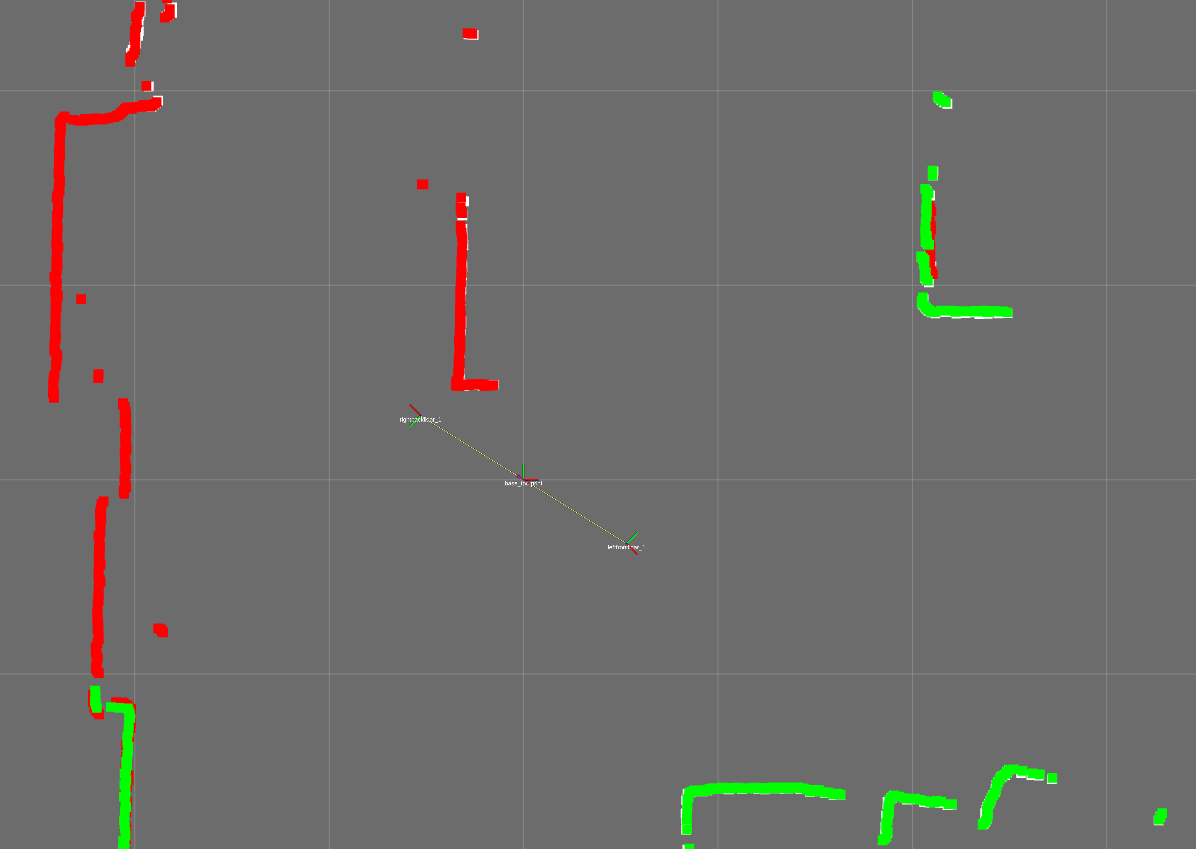
| 2022-06-30 19:38:17 -0500 | marked best answer | How to make ira_laser_tools work with AMCL/GMCL and GMapping ? I am currently on ROS Noetic Ubuntu 20.04 LTS. I am not doing this in simulation, although I believe you will run into the same problem if done in simulation. The problem is that GMapping or AMCL/GMCL does not work normally with the merged laser scans produced by ira_laser_tools. Note that I do not meet this issue when simply using one LiDAR. This issue occurs after merging with ira_laser_tools. I have two hokuyo urg-04lx-ug01 LiDARs. One is attached in front of my robot and the second behind it. Below in the image, the green represents the front LiDAR and the red represents the back LiDAR.
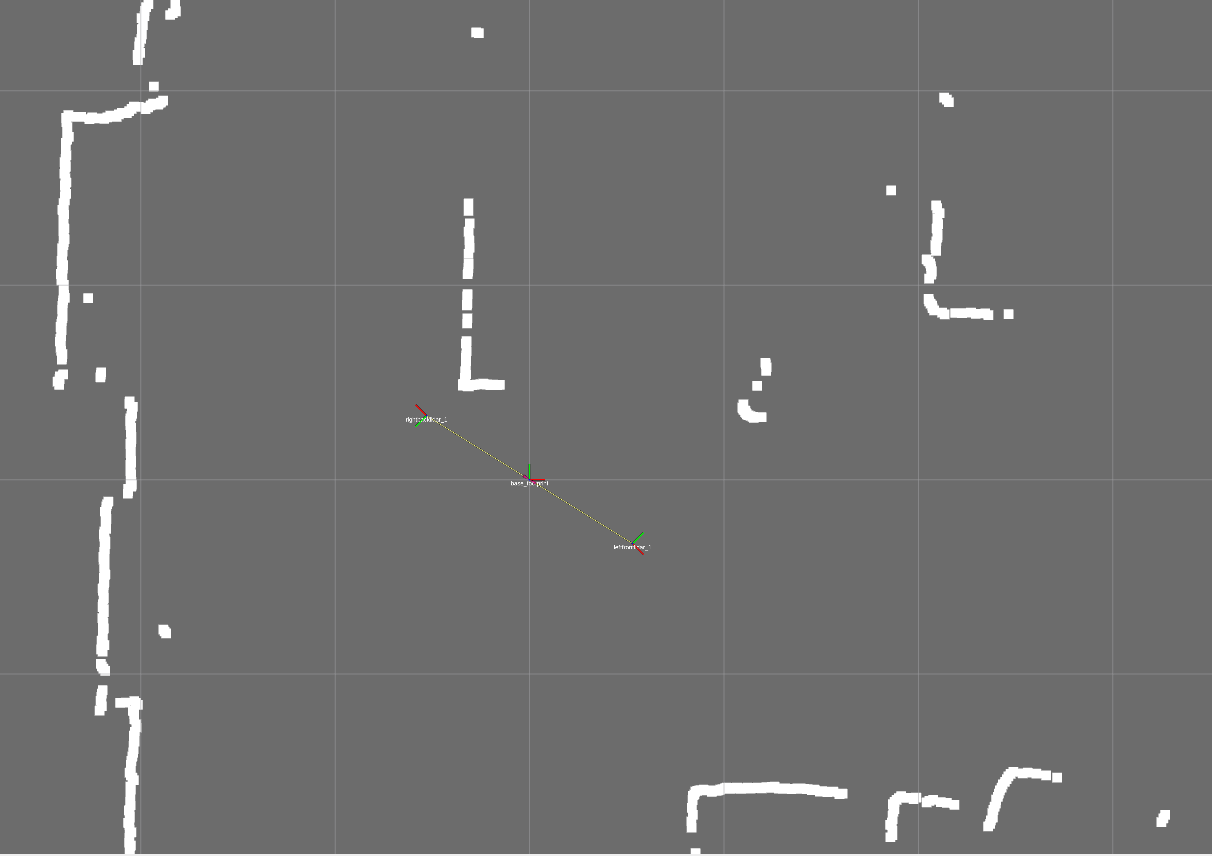
And in the image below, the white represents the merged Laser scan data. I used the ira_laser_tools to this. The name of the merged scan topic is scan_filtered_merged, despite its name, there is no filtering being done to it.
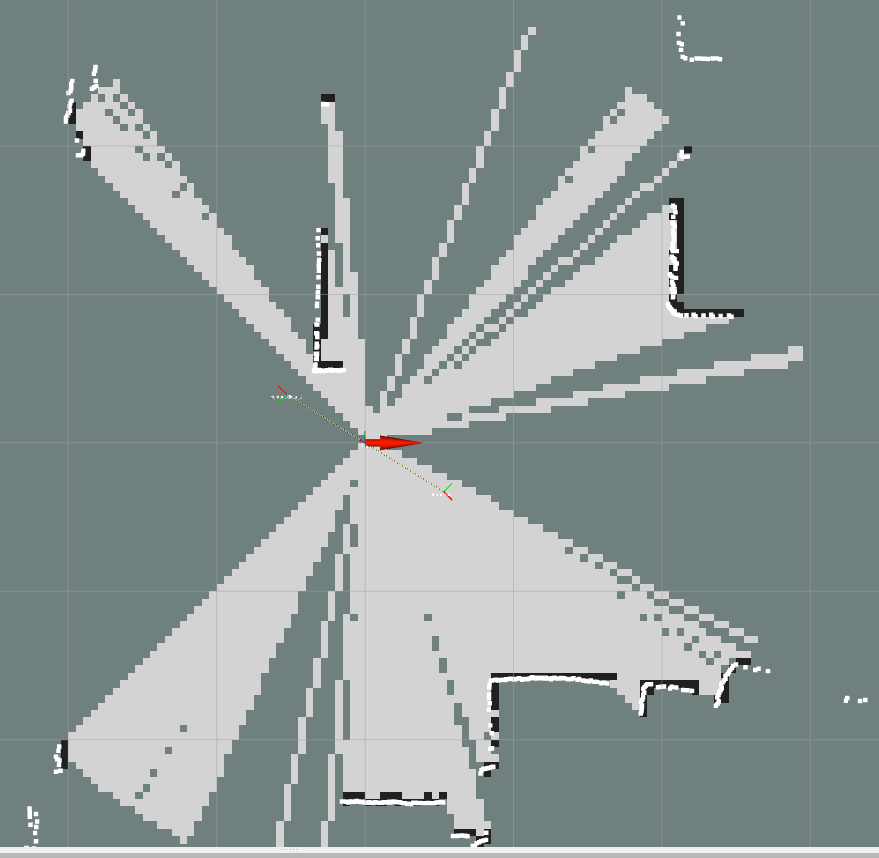
This is what my launch file looks like Now when I start GMapping, the first laser scan seems to work to create the map, but all other subsequent laser scans do not update or extend the map, even after turning or moving the robot for very large distances. This is what it looks like. I also put the log message from GMapping and my launch file.
|
| 2022-06-30 19:38:17 -0500 | received badge | ● Scholar (source) |
| 2022-06-27 10:20:32 -0500 | received badge | ● Popular Question (source) |
| 2022-06-24 03:51:58 -0500 | commented answer | How to make ira_laser_tools work with AMCL/GMCL and GMapping ? I don't know why ira_laser_tools isn't working. What I did was try other laser scan mergers like this one : https://gith |
| 2022-06-22 22:27:20 -0500 | answered a question | How to make ira_laser_tools work with AMCL/GMCL and GMapping ? Here's the solution. Don't use ira_laser_tools package. Use laserscan_merger instead which is over here : https://githu |
| 2022-06-22 22:27:20 -0500 | received badge | ● Rapid Responder (source) |
| 2022-06-22 19:44:56 -0500 | edited question | How to make ira_laser_tools work with AMCL/GMCL and GMapping ? How to make ira_laser_tools work with AMCL/GMCL and GMapping ? I am currently on ROS Noetic Ubuntu 20.04 LTS. I am not d |
| 2022-06-22 07:08:27 -0500 | commented answer | Laser Scanner Merging in one Topic Where is this scan merger package ? |
| 2022-06-22 04:36:50 -0500 | edited question | How to make ira_laser_tools work with AMCL/GMCL and GMapping ? How to make ira_laser_tools work with AMCL/GMCL and GMapping ? I am currently on ROS Noetic Ubuntu 20.04 LTS. I am not d |
| 2022-06-22 04:22:35 -0500 | asked a question | How to make ira_laser_tools work with AMCL/GMCL and GMapping ? How to make ira_laser_tools work with AMCL/GMCL and GMapping ? I am currently on ROS Noetic Ubuntu 20.04 LTS. I am not d |
| 2020-09-24 06:53:12 -0500 | received badge | ● Student (source) |
| 2020-04-07 01:37:34 -0500 | received badge | ● Famous Question (source) |
| 2020-03-23 19:13:14 -0500 | received badge | ● Notable Question (source) |
| 2020-01-31 01:40:32 -0500 | received badge | ● Famous Question (source) |
| 2020-01-20 23:44:15 -0500 | commented question | Global Costmap Detects Obstacle When None is there @mgruhler (Sorry a bagfile is currently unavailable.) The "ghost readings " appear anywhere in between as shown in the |
| 2020-01-20 23:43:55 -0500 | commented question | Global Costmap Detects Obstacle When None is there @mgruhler (Sorry a bagfile is currently unavailable.) The "ghost readings " appear anywhere in between as shown in |
| 2020-01-20 23:43:47 -0500 | commented question | Global Costmap Detects Obstacle When None is there @mgruhler - (Sorry a bagfile is currently unavailable.) The "ghost readings " appear anywhere in between as shown in |
| 2020-01-20 23:43:39 -0500 | commented question | Global Costmap Detects Obstacle When None is there @mgruhler (Sorry a bagfile is currently unavailable.) The "ghost readings " appear anywhere in between as shown in th |
| 2020-01-20 23:43:32 -0500 | commented question | Global Costmap Detects Obstacle When None is there @mgruhler (Sorry a bagfile is currently unavailable.) The "ghost readings " appear anywhere in between as shown in th |
| 2020-01-20 23:43:23 -0500 | commented question | Global Costmap Detects Obstacle When None is there @mgruhler (Sorry a bagfile is currently unavailable.) The "ghost readings " appear anywhere in between as shown in th |
| 2020-01-20 23:43:16 -0500 | commented question | Global Costmap Detects Obstacle When None is there @mgruhler (Sorry a bagfile is currently unavailable.) - The "ghost readings " appear anywhere in between as shown in t |
| 2020-01-20 11:55:12 -0500 | received badge | ● Popular Question (source) |
| 2020-01-20 01:14:30 -0500 | commented question | Global Costmap Detects Obstacle When None is there @mgruhler Thanks for the suggestion. I edited the question. Appreciate the help. |
| 2020-01-20 01:13:51 -0500 | edited question | Global Costmap Detects Obstacle When None is there Global Costmap Detects Obstacle When None is there I'm running Cartographer on ROS Kinetic on Ubuntu 16.04 using an rpli |
| 2020-01-17 01:35:11 -0500 | commented question | Global Costmap Detects Obstacle When None is there @mgruhler I'm using an rplidar as my data source. I've updated the issue by including the global costmap config file. A |
| 2020-01-17 01:33:28 -0500 | edited question | Global Costmap Detects Obstacle When None is there Global Costmap Detects Obstacle When None is there I'm running Cartographer on ROS Kinetic on Ubuntu 16.04 using an rpli |
| 2020-01-16 23:41:01 -0500 | commented question | Global Costmap Detects Obstacle When None is there @stevemacenski That's right, it's coming from the global costmap. However it should not be there because there are no ob |
| 2020-01-16 23:18:47 -0500 | commented question | Global Costmap Detects Obstacle When None is there @stevemacenski it's coming from the global costmap. |
| 2020-01-16 20:48:44 -0500 | edited question | Global Costmap Detects Obstacle When None is there Global Costmap Detects Obstacle When None is there I'm running Cartographer on ROS Kinetic on Ubuntu 16.04. When SLAM is |
| 2020-01-16 20:47:59 -0500 | edited question | Global Costmap Detects Obstacle When None is there Global Costmap Detects Obstacle When None is there I'm running Cartographer on ROS Kinetic on Ubuntu 16.04. When SLAM is |
| 2020-01-16 20:47:59 -0500 | received badge | ● Editor (source) |
| 2020-01-16 20:47:01 -0500 | asked a question | Global Costmap Detects Obstacle When None is there Global Costmap Detects Obstacle When None is there I'm running Cartographer on ROS Kinetic on Ubuntu 16.04. When SLAM is |
| 2020-01-14 07:52:19 -0500 | received badge | ● Famous Question (source) |
| 2019-10-28 08:49:03 -0500 | received badge | ● Famous Question (source) |
| 2019-10-28 08:49:03 -0500 | received badge | ● Notable Question (source) |
| 2019-10-28 08:49:03 -0500 | received badge | ● Popular Question (source) |
| 2019-09-23 03:42:05 -0500 | received badge | ● Notable Question (source) |
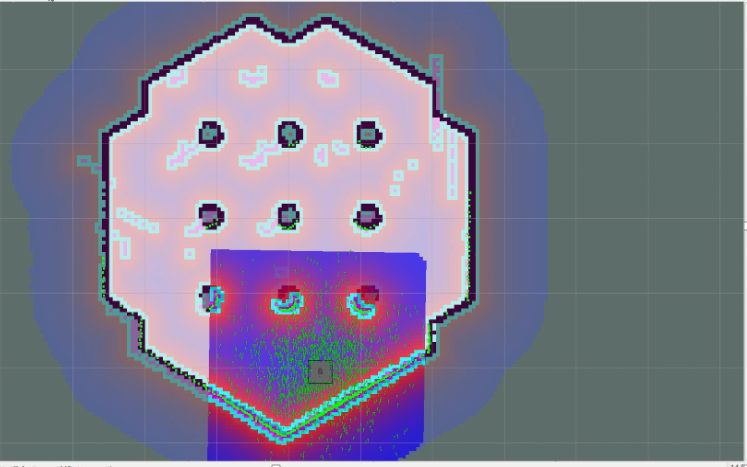
| 2019-07-09 03:04:44 -0500 | marked best answer | What do the colors in gmapping mean? I'm pretty new to ROS and I've been trying to do gmapping for turtlebot2 and turtlebot3 on Ubuntu 16.04 ROS-kinetic. I have been successful, however I've been trying to figure what the different colors mean. I've tried googling the answer but to no avail. Below are two links to see what I'm talking about. The first one is an image of turtlebot2 gmapping and the second one is of turtlebot3 gmapping.
Could anyone explain what the different colors that surround the objects mean for each of the images? What does the light blue, dark blue, red and pink colors in turtlebot2 gmapping mean ? In turtlebot3, there are light blue colors surrounding the objects but why are there light blue spots or circles on places that have no objects? Your answer would be much appreciated. |
| 2019-07-09 02:25:04 -0500 | answered a question | What do the colors in gmapping mean? http://wiki.ros.org/costmap_2d |
| 2019-07-09 02:24:13 -0500 | received badge | ● Notable Question (source) |
| 2019-07-03 21:21:46 -0500 | received badge | ● Popular Question (source) |
| 2019-06-24 02:00:28 -0500 | asked a question | Is it possible to Pause and Resume SLAM Is it possible to Pause and Resume SLAM I've been working with GMapping and Cartographer recently on ROS Kinetic. I noti |
| 2019-05-21 03:49:19 -0500 | asked a question | smach_viewer error smach_viewer error So I don't always get this error when I run smach_viewer but it occurs about 50% of the time I run it |
| 2018-12-23 07:17:57 -0500 | received badge | ● Enthusiast |
| 2018-12-12 11:13:07 -0500 | received badge | ● Popular Question (source) |
| 2018-12-12 03:35:11 -0500 | commented question | What do the colors in gmapping mean? Sure thing. Thanks for the karma. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.