The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-08-16 14:31:17 -0500 | received badge | ● Famous Question (source) |
| 2020-05-22 05:27:58 -0500 | received badge | ● Popular Question (source) |
| 2020-05-22 05:27:58 -0500 | received badge | ● Notable Question (source) |
| 2020-05-01 08:53:15 -0500 | received badge | ● Teacher (source) |
| 2020-05-01 08:53:15 -0500 | received badge | ● Self-Learner (source) |
| 2019-08-13 10:49:58 -0500 | commented question | lost static frames of multicameras through rosbridge not at all, we use multi master is for some other reasons. However, my problem is not from multimaster. But it is from r |
| 2019-08-13 08:33:59 -0500 | commented question | lost static frames of multicameras through rosbridge Thanks for your question. I have to use multi master since we would like to share topics for other computers also. We ha |
| 2019-08-13 07:02:53 -0500 | commented question | lost static frames of multicameras through rosbridge Thanks PeteBlackerThe3rd so much for your feedback. 2 computers are connected by using Ethernet cable. The connection is |
| 2019-08-13 07:01:38 -0500 | commented question | lost static frames of multicameras through rosbridge Thanks PeteBlackerThe3rd so much for your feedback. 2 computers are connected by using Ethernet cable. The connection is |
| 2019-08-13 05:09:44 -0500 | edited question | lost static frames of multicameras through rosbridge lost static frames of multicameras Hi everyone, I am facing the problem related to multicameras and rosbridge. I am usi |
| 2019-08-13 05:09:44 -0500 | received badge | ● Associate Editor (source) |
| 2019-08-13 05:05:58 -0500 | asked a question | lost static frames of multicameras through rosbridge lost static frames of multicameras Hi everyone, I am facing the problem related to multicameras and rosbridge. I am usi |
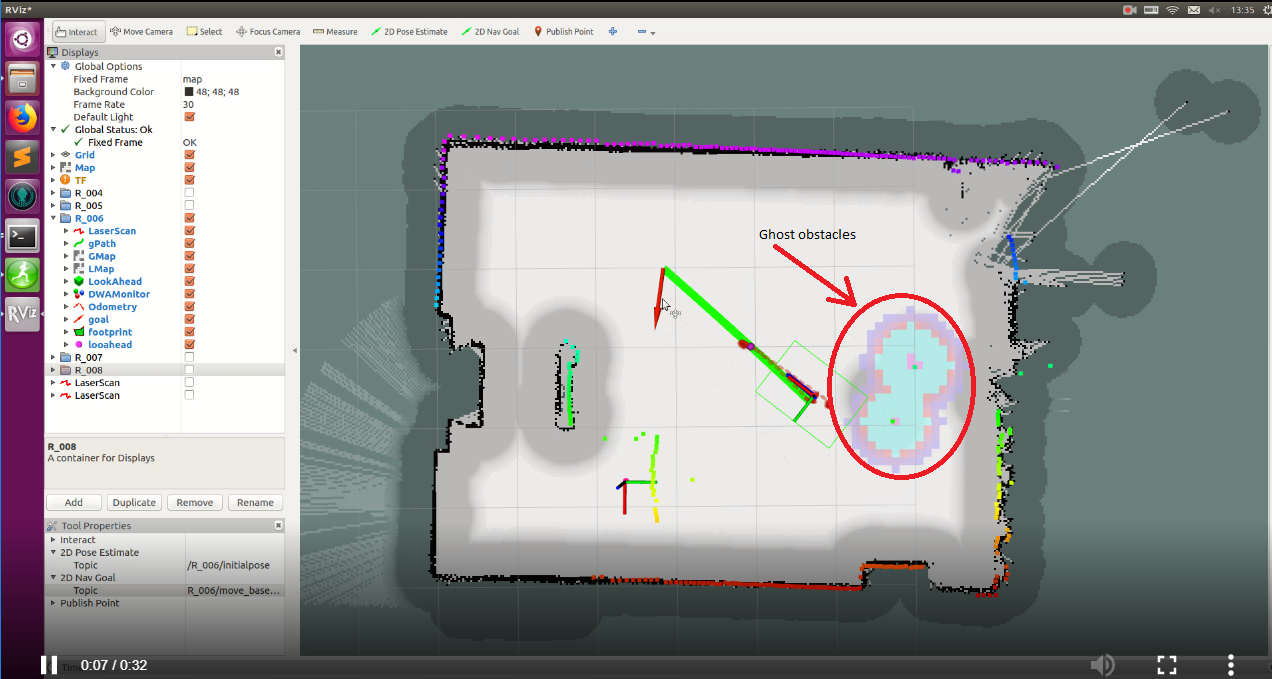
| 2019-05-03 04:45:34 -0500 | marked best answer | Ghost obstacles on costmap Hi everyone, Please give me some advices for this problem with ghost obstacles. My mobile robot is working with ROS (Kinetic, Ubuntu 16.0.4) using Sick sensor. My robot uses 2 Sick sensor, one is in the right-upper corner and another one is in left-bottom corner. I use ira_laser_tools to merge data of these 2 laser scanners. However, I am stucking at one problem: ghost obstacles appear on the costmap, and this ghost obstacle is relative to my mobile robot. If my robot moves, the ghost obstacle relatively follow. It causes mobile robot try to avoid obstacles even though there is no real obstacles. I have tried to use some different laser-filter packages, but this problem still happen. Can you please give me some suggestion ? Thanks in advances I took a video about my error (ghost obstacle) as in the link below: https://www.youtube.com/watch?v=THt7o... And, the picture within the indication for ghost obstacles here:
And, the costmap configuration: costmap_common_params: |
| 2019-05-03 04:24:31 -0500 | commented question | Ghost obstacles on costmap I have solved the problem. The reason is that the setting of angle_range and position of Sick sensor on the robot cause |
| 2019-05-03 04:22:57 -0500 | commented question | Ghost obstacles on costmap I have solved the problem. The reason is that the setting of angle_range and position of Sick sensor on the robot cause |
| 2019-05-02 21:32:08 -0500 | edited question | Ghost obstacles on costmap Ghost obstacles on costmap Hi everyone, Please give me some advices for this problem with ghost obstacles. My mobile r |
| 2019-05-02 21:30:32 -0500 | commented question | Ghost obstacles on costmap I also tried to use LaserScanIntensityFilter, increase the values of raytrace_range, however the problem still happened. |
| 2019-04-29 05:08:12 -0500 | commented answer | What's the rational behind laser_filters/ScanShadowsFilter? Yes, so sorry for that. |
| 2019-04-29 04:33:55 -0500 | edited answer | What's the rational behind laser_filters/ScanShadowsFilter? Hi bros, I am facing with 'ghost obstacles' that similar to above problem, however, I could not solve the problem even |
| 2019-04-29 04:33:21 -0500 | answered a question | What's the rational behind laser_filters/ScanShadowsFilter? Hi bros, I am facing with 'ghost obstacles' that similar problem above, however, I could not solve the problem even I u |
| 2019-04-29 04:16:30 -0500 | received badge | ● Commentator |
| 2019-04-29 04:15:41 -0500 | commented question | Ghost obstacles on costmap Hi @mgruhler: I have used ScanShadowsFilter however, the error still happen. This is the parameters for ScanShadowsFilt |
| 2019-04-29 04:14:56 -0500 | received badge | ● Famous Question (source) |
| 2019-04-29 04:14:50 -0500 | commented question | Ghost obstacles on costmap Hi @mgruhler: I have used ScanShadowsFilter however, the error still happen. This is the parameters for ScanShadowsFilt |
| 2019-04-25 05:07:40 -0500 | commented question | Ghost obstacles on costmap Yes, the model of Sick sensor which i am using is: TIM551. |
| 2019-04-25 03:22:21 -0500 | commented question | Ghost obstacles on costmap @mgruhler thank you so much for your answer I am using Sick sensor. Our laboratory does not has mirror and glass. Th |
| 2019-04-25 03:22:07 -0500 | commented question | Ghost obstacles on costmap @mgruhler thank you so much for your answer I am using Sick sensor. Our laboratory does not has mirror and glass. Th |
| 2019-04-25 03:22:02 -0500 | commented question | Ghost obstacles on costmap @mgruhler thank you so much for your answer I am using Sick sensor. Our laboratory does not has mirror and glass. Th |
| 2019-04-25 03:14:09 -0500 | commented question | Ghost obstacles on costmap @mgruhler thank you so much for your answer I am using Sick sensor. Our laboratory does not has mirror and glass. Th |
| 2019-04-25 03:13:17 -0500 | commented question | Ghost obstacles on costmap @mgruhler thank you so much for your answer I am using Sick sensor. Our laboratory does not has mirror and glass. Th |
| 2019-04-25 02:50:07 -0500 | received badge | ● Notable Question (source) |
| 2019-04-25 02:29:46 -0500 | commented question | Ghost obstacles on costmap I updated the video and picture about error and cost_map configuration @mgruhler |
| 2019-04-25 02:28:51 -0500 | commented question | Ghost obstacles on costmap Thank you so much @gvdhoorn |
| 2019-04-25 02:28:03 -0500 | edited question | Ghost obstacles on costmap Ghost obstacles on costmap Hi everyone, Please give me some advices for this problem with ghost obstacles. My mobile r |
| 2019-04-25 02:26:36 -0500 | edited question | Ghost obstacles on costmap Ghost obstacles on costmap Hi everyone, Please give me some advices for this problem with ghost obstacles. My mobile r |
| 2019-04-25 02:24:19 -0500 | edited question | Ghost obstacles on costmap Ghost obstacles on costmap Hi everyone, Please give me some advices for this problem with ghost obstacles. My mobile r |
| 2019-04-25 02:21:58 -0500 | edited answer | Ghost obstacles on costmap hi mgruhler, I took a video about my error (ghost obstacle) as in the link below: https://www.youtube.com/watch?v=THt7 |
| 2019-04-25 02:21:00 -0500 | received badge | ● Popular Question (source) |
| 2019-04-25 02:18:52 -0500 | answered a question | Ghost obstacles on costmap hi mgruhler, I took a video about my error (ghost obstacle) as in the link below: https://www.youtube.com/watch?v=THt7 |
| 2019-04-24 05:12:04 -0500 | commented question | Ghost obstacles on costmap Thank mgruhler so much for your quick help, I will prepare those kinds of data and update soon |
| 2019-04-24 05:11:43 -0500 | commented question | Ghost obstacles on costmap Thank you so much for your quick help, I will prepare those kinds of data and update soon |
| 2019-04-24 04:00:46 -0500 | commented answer | Gazebo, KUKA iiwa lbr thank you so much for your answer |
| 2019-04-24 03:23:09 -0500 | commented question | KUKA iiwa lBR 14, ROS, Rviz Yes, I uses iiwa_stack |
| 2019-04-24 03:22:05 -0500 | received badge | ● Famous Question (source) |
| 2019-04-24 03:22:05 -0500 | received badge | ● Notable Question (source) |
| 2019-04-24 03:22:04 -0500 | received badge | ● Popular Question (source) |
| 2019-04-24 02:35:31 -0500 | asked a question | Ghost obstacles on costmap Ghost obstacles on costmap Hi everyone, Please give me some advices for this problem with ghost obstacles. My mobile r |
| 2019-02-18 23:34:08 -0500 | received badge | ● Famous Question (source) |
| 2018-12-11 05:19:34 -0500 | edited question | Astra S camera cannot run, ROS Astra S camera cannot run, ROS Hi everyone, I am testing the Astra S camera, I already installed necessary Drivers and |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.