The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2019-09-22 22:48:03 -0500 | received badge | ● Famous Question (source) |
| 2019-02-11 10:34:41 -0500 | marked best answer | Ros2 Service Send Request Does Not Send I have been debugging an issue that causes my program to deadlock. I created a minimal working example that replicates the behavior: https://github.com/borgmanJeremy/ros_... This example uses ros2 services. The server manages a vector of ints. Clients can "register" new values, and the server will append these values to the vector. Clients can also query a position in the vector, and if the position exists, the server will return the value in that position. The issue I have is that when starting with my launch file (ros2 launch ros_service_mwe mwe_service.launch.py) sometimes the client that is waiting for a value at particular position gets stuck in spin_until_future_complete(). I did some debugging with WireShark and it looks like the service request never makes it to the wire. This is tricky to troubleshoot as it fails ~1 in 10 times on my particular machine, but the failure rate changes depending on the machine. The easiest way to detect this condition is to look at the terminal output and wait for an instance where the [getNode] does not print: [INFO] [getNode]: Value of Pos: 7 I can solve this issue by adding a timeout / retry strategy to the spin_until_future_complete() call, but I really don't understand the root cause of the issue and am afraid I will mask an issue that will manifest in the future. I started this minimal example with the add_two_ints example, so the print_usage() function still matches that example. This is running on the Crystal release of ROS2. |
| 2019-02-11 10:34:41 -0500 | received badge | ● Scholar (source) |
| 2019-02-11 08:43:16 -0500 | received badge | ● Self-Learner (source) |
| 2019-02-11 08:43:16 -0500 | received badge | ● Teacher (source) |
| 2019-02-11 07:31:30 -0500 | answered a question | Ros2 Service Send Request Does Not Send This turned out to be a bug solved by building with the latest crystal release: https://github.com/ros2/rclcpp/issues/62 |
| 2019-02-11 07:31:06 -0500 | received badge | ● Notable Question (source) |
| 2019-01-23 08:29:51 -0500 | received badge | ● Enthusiast |
| 2019-01-22 16:59:08 -0500 | commented answer | VSCode debug cpp ROS node No problem....BTW if you want to use c++ there is nothing special about ROS with respect to VSCode and the GDB plugin. Y |
| 2019-01-22 16:07:06 -0500 | answered a question | VSCode debug cpp ROS node It literally says in the notes for that VS Code extension that breakpoints are not enabled when using Ros Launch or Ros |
| 2019-01-22 16:03:45 -0500 | commented question | ROSBridge For Multiple Processes How are you launching the bridge and what kind of topics are you bridging? I have a dynamic bridge that correctly bridge |
| 2019-01-22 15:59:08 -0500 | received badge | ● Popular Question (source) |
| 2019-01-22 09:14:52 -0500 | asked a question | Ros2 Service Send Request Does Not Send Ros2 Service Send Request Does Not Send I have been debugging an issue that causes my program to deadlock. I created a m |
| 2018-11-07 07:57:14 -0500 | received badge | ● Student (source) |
| 2018-10-30 06:32:34 -0500 | received badge | ● Famous Question (source) |
| 2018-10-10 01:35:21 -0500 | marked best answer | CMAKE_PREFIX_PATH package not found Hello, I've been stuck on an issue in my ROS project after I started using an overlay. I used to just place all of my packages inside /src/ros2/<my_package> . I am trying to move my project into an overlay to make it more modular. I have reduced my problem to just two packages. Package 1 is named "qualified_msgs" and builds with no issues. My second package is "ros_can_bridge" and this depends on the "qualified_msgs" package. My build process is as follows:
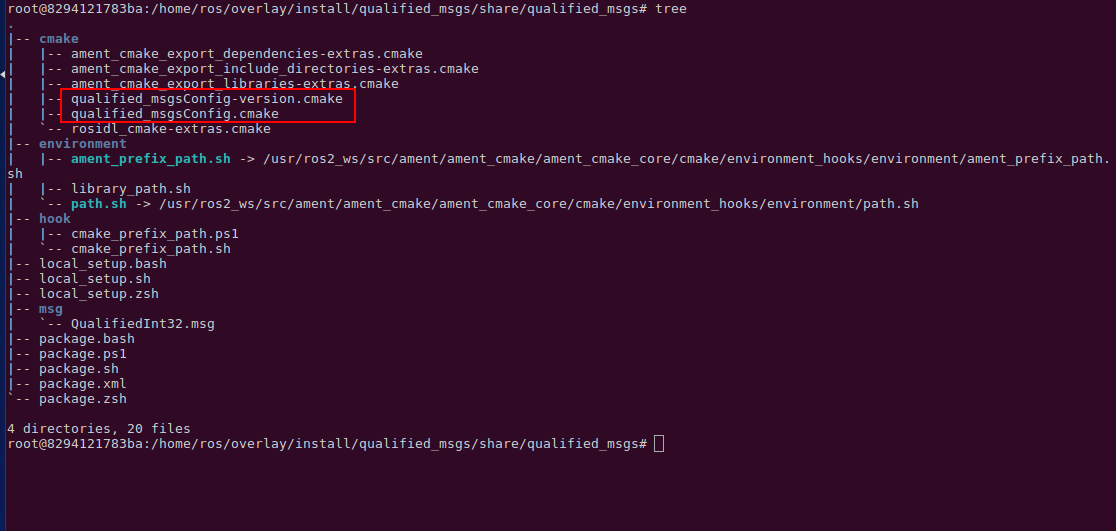
When I try to execute step I get the following error: However, If I view my build log I can see that this is in the path: Portion of Log:
I can see that my CMAKE files are indeed in this directory: Folder Structure package.xml for ros_can_bridge:
Build Command:
Any advice on this would be appreciated, I'm pretty stuck! Thanks, |
| 2018-10-09 11:45:09 -0500 | answered a question | CMAKE_PREFIX_PATH package not found The root cause of this issue was related to my aarch64_toolchainfile.cmake file. This file had the line below: set(CM |
| 2018-10-09 11:44:03 -0500 | commented question | CMAKE_PREFIX_PATH package not found @Dirk Thanks, as I was trying to reproduce the issue with the simplest example possible I found the problem. This buil |
| 2018-10-08 17:38:00 -0500 | received badge | ● Notable Question (source) |
| 2018-10-06 17:25:01 -0500 | received badge | ● Popular Question (source) |
| 2018-10-06 06:51:04 -0500 | edited question | CMAKE_PREFIX_PATH package not found CMAKE_PREFIX_PATH package not found Hello, I've been stuck on an issue in my ROS project after I started using an overl |
| 2018-10-06 06:49:03 -0500 | edited question | CMAKE_PREFIX_PATH package not found CMAKE_PREFIX_PATH package not found Hello, I've been stuck on an issue in my ROS project after I started using an overl |
| 2018-10-06 06:49:03 -0500 | received badge | ● Editor (source) |
| 2018-10-06 06:46:45 -0500 | commented question | CMAKE_PREFIX_PATH package not found @jacobperron, Added the details of package.xml and clarifed the build command. Thanks for the help @ gvdhoorn. Sorry ab |
| 2018-10-06 06:44:17 -0500 | edited question | CMAKE_PREFIX_PATH package not found CMAKE_PREFIX_PATH package not found Hello, I've been stuck on an issue in my ROS project after I started using an overl |
| 2018-10-05 15:52:42 -0500 | asked a question | CMAKE_PREFIX_PATH package not found CMAKE_PREFIX_PATH package not found Hello, I've been stuck on an issue in my ROS project after I started using an overl |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.