The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-03-01 02:53:08 -0500 | received badge | ● Good Question (source) |
| 2022-07-07 08:24:46 -0500 | received badge | ● Famous Question (source) |
| 2022-06-03 05:48:12 -0500 | received badge | ● Famous Question (source) |
| 2022-04-11 06:27:53 -0500 | received badge | ● Famous Question (source) |
| 2022-01-23 16:09:14 -0500 | received badge | ● Nice Question (source) |
| 2022-01-18 23:34:03 -0500 | marked best answer | Service server and client in python following tutorial does not work I'm trying to make a service that I could call to change a pose of a robotic arm using MoveIt!. I follow this tutorial, but I get an error: This seems as a problem purely in the client code, so I show the client code and the service definition bellow. I have defined the servise as 4 float numbers each with a specific name. So when I pass the client four numbers (via terminal arguments), I expect to be able to simply assign those values to the service message as shown below. But something is not right. Can you point out the mistake for me? srv/SetJointStates.srv: script/set_joint_states_client.py: EDIT 1 When I put |
| 2021-12-12 07:05:53 -0500 | received badge | ● Nice Question (source) |
| 2021-11-17 12:57:52 -0500 | marked best answer | rospy.wait_for_message does not get the message even though new messages are being published I'm running a script where I use the rospy.wait_for_message in a while loop to wait for a message of a topic, that is publishing at certain event. On the first event the while loop runs as expected, sometimes even on the second. I can see by running When I reset the script the first one or two events are again processed as expected and that the process halts. I cannot find any errors nor warnings printed in the terminal. This is my script: It also seems, that when I subscribe to the EDIT The problem is somehow connected to the multimaster-FKIE package. I run two simulations on two ROS masters and use the multimaster-FKIE package to allow communication between them. The node shown above is supposed to read messages from topics started in one ROS master and publish messages into the topics started in the other ROS master. When I run the node on the ROS core where the |
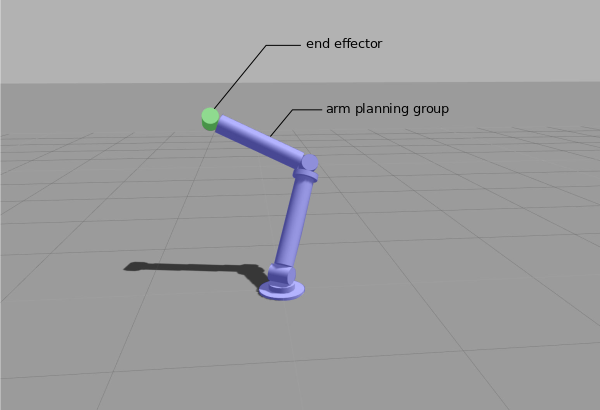
| 2021-10-01 07:04:47 -0500 | marked best answer | How is the end effector in MoveIt! suppposed to be used? In the MoveIt! Setup Assistant 2.0, there is a tag "End Effectors", which content translates to the What is this good for and how was it meant to be used? Given you have one simple robotic manipulator similar to the one on the picture bellow.
Say I want the possition of the link marked as 'end effector' to be controlled by the MoveIt! planner. So I tell the MoveIt! "Move the manipulator in such a way, that this link ends up at coordinates [0.2, 0.1, 1.0]." and it plans the trajectories of the whole arm to satisfy this instruction. How should I set the end effector element and planning groups? |
| 2021-10-01 07:04:47 -0500 | received badge | ● Self-Learner (source) |
| 2021-09-22 12:51:57 -0500 | received badge | ● Favorite Question (source) |
| 2021-05-05 07:14:46 -0500 | received badge | ● Good Question (source) |
| 2021-04-14 08:55:10 -0500 | received badge | ● Famous Question (source) |
| 2021-04-14 08:50:48 -0500 | marked best answer | Why does rospy::wait_for_message get stucked even though messages are being published? I am using this method in my python script The EDIT |
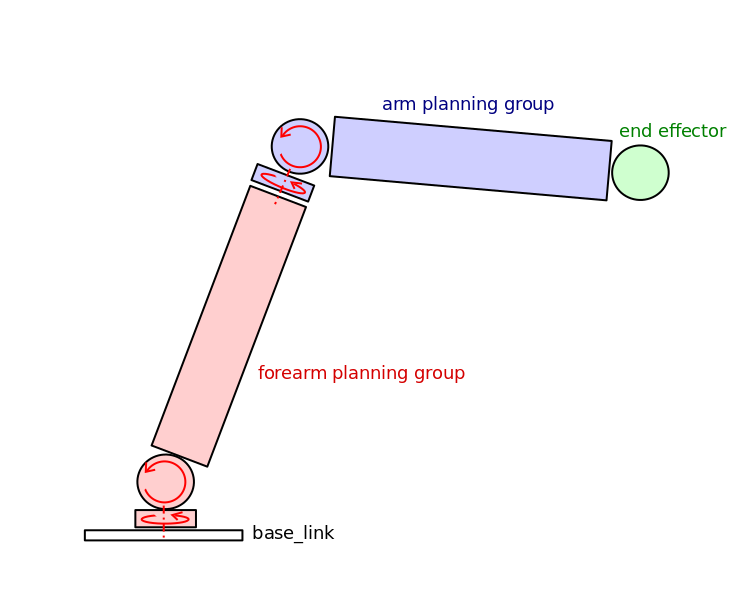
| 2021-04-02 09:01:48 -0500 | marked best answer | How is MoveIt! planning group supposed to be used? I have a question about use of the MoveIt! planning groups. Say I have a robotic manipulator consisting of two arms (as on the picture below), that can rotate around its axis and around an axis perpendicular to its axis.
When I define two planning groups, one for the bottom arm and one for the upper arm, in the Rviz I have to move those groups separately. And as I was quickly looking through a Python interface tutorial for MoveIt!, it seems that you would need to set the pose of each planning group individually. Now that doesn't look like something you want to do. Ideally you want to move the whole robot at once, right? But if I define the whole robot as one planning group, what is the purpose of the planning groups in the first place? Can somebody shed some light on this matter? Thank you. |
| 2021-03-21 21:57:57 -0500 | received badge | ● Good Question (source) |
| 2021-03-17 18:47:09 -0500 | received badge | ● Famous Question (source) |
| 2021-02-11 19:24:31 -0500 | received badge | ● Nice Question (source) |
| 2021-02-05 00:04:37 -0500 | received badge | ● Famous Question (source) |
| 2021-01-25 16:24:55 -0500 | received badge | ● Famous Question (source) |
| 2020-12-18 13:24:38 -0500 | marked best answer | How to optimize service calls I'm trying to optimize my code so I was measuring how long different parts of ROS process take. Specifically always seems to take little over 2 ms always seems to take little under 1 ms always seems to take little over 1 ms This all causes the one service call to result in about 4 ms of delay and I want to get my program to 1 ms precision. What are the variables that effect how long those service calls take? Can I adjust the setting somewhere to make it faster? |
| 2020-11-21 14:51:37 -0500 | received badge | ● Popular Question (source) |
| 2020-11-21 14:51:37 -0500 | received badge | ● Famous Question (source) |
| 2020-11-21 14:51:37 -0500 | received badge | ● Notable Question (source) |
| 2020-08-31 03:34:12 -0500 | received badge | ● Nice Answer (source) |
| 2020-08-14 07:43:40 -0500 | received badge | ● Notable Question (source) |
| 2020-08-14 07:34:49 -0500 | edited answer | C++ plugin cannot get parameter that has been uploaded to param server later Ok, the reason the this->rosNode->getParam("/parameter_from_node", parameter_from_node) returned false was because |
| 2020-08-14 07:33:09 -0500 | marked best answer | C++ plugin cannot get parameter that has been uploaded to param server later I want to load parameters from the ROS param server in the Gazebo model plugin. I do not have any problem with getting the parameters thet were set in the launch files, but I run a node that uploads a list of parameters to the rosparam server later in the run. I can see and read the parameters using terminal, but the gazebo plugin does not see the new parameters (I check for them inside the plugin on every update). Can you provide any insight into why is this happening? EDIT I am accessing the parameters from gazebo plugin using EDIT 2 code snippet the parameter_from_launch is found on the first try and prints the correct value. The "ROS parameter /parameter_from_node was not found. \n" keeps being printed and the |
| 2020-08-14 07:32:08 -0500 | answered a question | C++ plugin cannot get parameter that has been uploaded to param server later Ok, the reason the this->rosNode->getParam("/parameter_from_node", parameter_from_node) returned false was because |
| 2020-08-14 07:32:08 -0500 | received badge | ● Rapid Responder (source) |
| 2020-08-13 13:24:20 -0500 | commented question | C++ plugin cannot get parameter that has been uploaded to param server later @Tahir M. @Delb I eddited the question to address your remarks. |
| 2020-08-13 13:23:42 -0500 | edited question | C++ plugin cannot get parameter that has been uploaded to param server later C++ plugin cannot get parameter that has been uploaded to param server later I want to load parameters from the ROS para |
| 2020-08-13 13:21:06 -0500 | edited question | C++ plugin cannot get parameter that has been uploaded to param server later C++ plugin cannot get parameter that has been uploaded to param server later I want to load parameters from the ROS para |
| 2020-08-13 12:13:48 -0500 | received badge | ● Popular Question (source) |
| 2020-08-13 09:32:56 -0500 | commented question | C++ plugin cannot get parameter that has been uploaded to param server later @Delb, If I understand correctly, then that is what I am doing. On each update I call rosNode->getParam('param_name |
| 2020-08-13 09:32:39 -0500 | commented question | C++ plugin cannot get parameter that has been uploaded to param server later @Delb, If I understand correctly, then that is what I am doing. On each update I call rosNode->getParam('param_name |
| 2020-08-13 09:32:15 -0500 | commented question | C++ plugin cannot get parameter that has been uploaded to param server later @Delb, If I understand correctly, then that is what I am doing. On each update I call rosNode->getParam('param_name |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.