The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2015-05-28 22:28:43 -0500 | marked best answer | Covariance matrix for /vo and /odom Hello there! I am currently trying to fuse the odometry messages from the ROSARIA and visual odometry messages from viso2_ros libraries using the robot_pose_ekf. However, I seem to always encounter an error of where the covariance matrix is zero. I am still a beginner, and I have read a little about covariance. I would like to know how to implement the covariance or include some appropriate values into the matrix in order for the robot_pose_ekf to work succesfully.. |
| 2014-11-24 00:41:29 -0500 | received badge | ● Famous Question (source) |
| 2014-03-18 19:22:24 -0500 | received badge | ● Famous Question (source) |
| 2014-02-26 08:45:02 -0500 | received badge | ● Famous Question (source) |
| 2014-01-28 17:31:03 -0500 | marked best answer | Coordinates of new area of a map Hello all! I am using a Pioneer P3AT to apply map building and autonomous navigation using a hokuyo laser with GMapping and Navigation stack. However for the autonomous navigation part, I was success to allow a random selection of unknown cell and move the robot to that cell. After actually applying this to the robot, I realized that the robot seems to be moving in a circle and always stay at the same area. I thought that if i could obtain the coordinates of the new area being built while mapping, I could direct the robot to move to that area instead..but I don't know if its possible as subscribing the /map topic could publish random points? |
| 2014-01-28 17:30:58 -0500 | marked best answer | How to navigate to unknown space in costmap? Hello all, I've followed the tutorial here http://www.ros.org/wiki/navigation/Tutorials/RobotSetup and also checked the website for similar questions but I am still quite confused and unable to produce the result I need. I'm hooking up GMapping to the Costmap by setting static_map: true for global_costmap_params.yaml and static_map: falase for local_cost_map_params. However I wish to allow the robot, Pionneer3-AT to auto navigate itself in that environment. I thought of pointing the 2D Nav Goal to the unknown space from local_costmap but I've received errors and there's no reaction from the robot whatsoever. Error from Costmap launch
Error from RVIZ
rostopic echo /move_base/local_costmap/unknown_space would also most of the time not return anything. I also applied unknown_cost_value: 255 and track_unknown_space: true to the costmap_common_params It'll be great to get some help to achieve autonavigation in an unknown environment. ** EDIT 1 The errors were eliminated by setting static_map: false for global_costmap. However, there doesn't seem to be any path planning occuring. No errors were found in rxgraph and roswtf too. ** EDIT 2 The global_costmap_params.yaml has settings of static_map: false and rolling_window:true. I've created a simple publisher and subscriber to subscribe to nav_msgs/GridCells on topic move_base/local_costmap/unknown_space and publish geometry_msgs/PoseStamped on topic /move_base_simple/goal. Since there are a bunch of coordinates of unknown space, a random coordinate is chosen. The basic ROS tutorial for writing a subscriber/publisher should be referred to as an example. |
| 2013-11-06 10:21:01 -0500 | received badge | ● Notable Question (source) |
| 2013-10-31 03:14:18 -0500 | received badge | ● Famous Question (source) |
| 2013-10-21 00:44:40 -0500 | received badge | ● Notable Question (source) |
| 2013-10-17 17:09:02 -0500 | received badge | ● Popular Question (source) |
| 2013-08-23 01:13:25 -0500 | received badge | ● Notable Question (source) |
| 2013-08-21 01:38:40 -0500 | received badge | ● Popular Question (source) |
| 2013-08-20 23:22:07 -0500 | commented answer | GMapping map changes over time Yeap I did, it isn't too bad. Another sensor source would be a laser range scanner, Hokuyo URG-04LX-UG01. |
| 2013-08-20 03:43:17 -0500 | asked a question | GMapping map changes over time Hello all! I've been conducting some exploration and mapping indoors using GMapping. However, I realize that as the robot moves and builds the map, certain areas of the map changes as the robot moves and worsen. I have a hunch that it could be the odometry data, but I need some verification of it. Also, would love to know what are the ways to improve the mapping and reduce any errors caused. The robot was most of the time moving and turning at 0.1 m/s. The maximum speed I set was 0.2 m/s. Number of particles for the map is about 100.
The image above shows the two corridors not being parallel and at the bottom of the map being distorted. Comparing this image: and this image:
just a lil difference in the robot's position caused so much error at the robot's initial position (in the first picture). Overall map built:
|
| 2013-08-12 10:07:09 -0500 | received badge | ● Famous Question (source) |
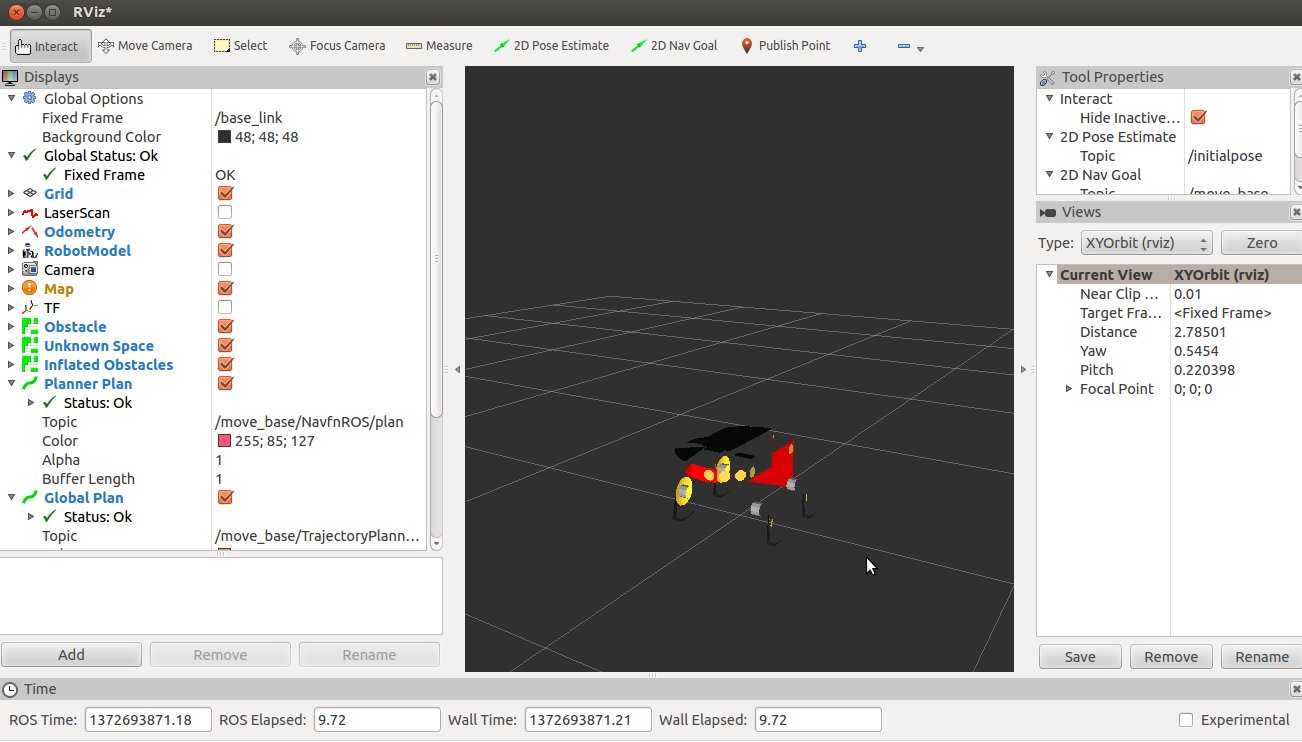
| 2013-07-16 04:53:43 -0500 | marked best answer | Incomplete Pioneer 3-AT URDF Hello all! I seem to be having a slight issue, whereby the Pioneer 3-AT doesn't seem to produce a complete RobotModel. I am currently using the p2os_urdf package to initiate this RobotModel. Even initiating the launch file for a pioneer3dx seem to produce the same issue.. Any help would be very much appreciated!
|
| 2013-07-16 04:53:36 -0500 | commented answer | Incomplete Pioneer 3-AT URDF I've actually tried the package with another laptop and the robot model's perfect! Must have been the drivers of my graphic card..may have had some problem earlier. Thanks! |
| 2013-07-16 04:51:02 -0500 | asked a question | Unable to run p2os_dashboard Hello! I am using a Pioneer 3-AT and ROS Groovy, and successfully using the P2OS_DRIVER to connect to the robot. Also being able to control using the keyboard with the TELE_OP launch files. However, when i execute rosrun p2os_dashboard p2os_dashboard, this error appears and I've checked the p2os source files and I can't seem to figure out. Would appreciate the help!
|
| 2013-07-14 05:22:35 -0500 | marked best answer | Rosdep experienced an internal error... Hey all, I seem to be having this problem whenever using rosdep
Whenever I try to apply sudo rosdep, I'll obtain this error:
Can anyone please help me with a fix? Thanks :) |
| 2013-07-09 02:54:30 -0500 | commented answer | Coordinates of new area of a map Oh okay, I was just thinking if there is a way to extract out the coordinates of the new area of the map being created |
| 2013-07-08 22:19:27 -0500 | commented answer | Coordinates of new area of a map Yeah I'm wondering if there is way to do so autonomously.. Cant seem to figure out despite subscribing to the /map and /map_metadata topic |
| 2013-07-06 04:03:02 -0500 | received badge | ● Famous Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.