The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-10-28 09:55:46 -0500 | received badge | ● Famous Question (source) |
| 2020-10-28 09:55:46 -0500 | received badge | ● Notable Question (source) |
| 2020-10-28 09:55:46 -0500 | received badge | ● Popular Question (source) |
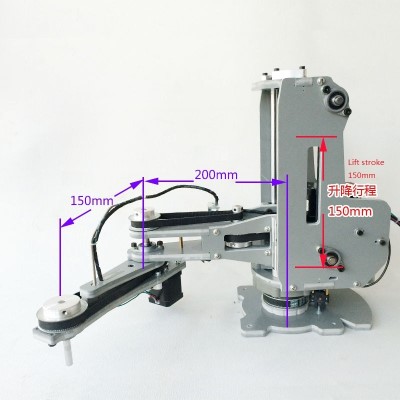
| 2019-12-02 09:44:50 -0500 | marked best answer | My first URDF for a Scara Arm shows in rViz but not Gazebo. Hi, thanks so much in advance for your guidance. I am new to ROS but have gotten through the Turtlebot 2 tutorials with a Create 2 Turtlebot I built and am now trying to create a URDF for a Scara arm I bought off aliexpress:
Going through the URDF_SIM_TUTORIAL, I have gotten the robot defined well enough to show up in rViz with working joints but not gazebo. I'm assuming some problem with my using inertia values that are likely incorrect may be the problem but I cannot make sense of the output. Grateful for any advice. Also, if there happens to be a URDF I do not know about I could use with or modify for this robot, please let me know. I'm not wanting to reinvent the wheel but could not figure out a faster path to using this robot with ROS. rViz command (shows robot with functioning joints) Output from Terminal: Gazebo launch command (launches gazebo but shows no robot): Terminal: |
| 2019-12-02 09:44:50 -0500 | received badge | ● Good Answer (source) |
| 2019-12-02 09:44:50 -0500 | received badge | ● Enlightened (source) |
| 2019-12-02 09:30:36 -0500 | received badge | ● Student (source) |
| 2019-10-13 16:46:04 -0500 | received badge | ● Necromancer (source) |
| 2019-09-02 06:37:00 -0500 | received badge | ● Famous Question (source) |
| 2019-09-02 06:37:00 -0500 | received badge | ● Notable Question (source) |
| 2019-09-02 06:37:00 -0500 | received badge | ● Popular Question (source) |
| 2019-07-21 22:17:59 -0500 | received badge | ● Famous Question (source) |
| 2019-06-16 18:33:02 -0500 | received badge | ● Famous Question (source) |
| 2019-06-16 18:33:02 -0500 | received badge | ● Notable Question (source) |
| 2019-06-16 18:33:02 -0500 | received badge | ● Popular Question (source) |
| 2019-06-11 12:08:15 -0500 | received badge | ● Famous Question (source) |
| 2019-06-06 02:40:21 -0500 | marked best answer | GLib-GObject-CRITICAL **: 16:48:21.136: g_object_unref: assertion 'G_IS_OBJECT (object)' failed Attempt to unlock mutex that was not locked Aborted (core dumped) I'm trying to run this tutorial (melodic remote PC, kinetic turtlebot 2) I confirmed via The result I got on remote PC was: What did I do wrong? |
| 2019-06-05 18:12:50 -0500 | commented question | Received comm state PREEMPTING when in simple state DONE with SimpleActionClient in NS /move_base Yes thank you for fixing it, For some reason I thought that was only available for code. Thanks! |
| 2019-06-05 16:56:53 -0500 | answered a question | GLib-GObject-CRITICAL **: 16:48:21.136: g_object_unref: assertion 'G_IS_OBJECT (object)' failed Attempt to unlock mutex that was not locked Aborted (core dumped) While I had installed via apt-get install ros-melodic-image-view, somehow removing that and cloning the git repository i |
| 2019-06-05 16:56:53 -0500 | received badge | ● Rapid Responder (source) |
| 2019-06-05 16:51:06 -0500 | asked a question | GLib-GObject-CRITICAL **: 16:48:21.136: g_object_unref: assertion 'G_IS_OBJECT (object)' failed Attempt to unlock mutex that was not locked Aborted (core dumped) GLib-GObject-CRITICAL **: 16:48:21.136: g_object_unref: assertion 'G_IS_OBJECT (object)' failed Attempt to unlock mutex |
| 2019-06-05 16:28:06 -0500 | received badge | ● Organizer (source) |
| 2019-06-05 16:10:05 -0500 | edited question | Received comm state PREEMPTING when in simple state DONE with SimpleActionClient in NS /move_base Received comm state PREEMPTING when in simple state DONE with SimpleActionClient in NS /move_base I have a turtlebot on |
| 2019-06-05 16:08:02 -0500 | asked a question | Received comm state PREEMPTING when in simple state DONE with SimpleActionClient in NS /move_base Received comm state PREEMPTING when in simple state DONE with SimpleActionClient in NS /move_base I have a turtlebot on |
| 2019-04-06 18:28:28 -0500 | received badge | ● Notable Question (source) |
| 2019-03-29 19:42:33 -0500 | commented question | openni_launch problem with Kinect xbox 360 in Melodic on RockPro64 The openni website goes to apple.com now so that is never a good sign... |
| 2019-03-29 07:53:35 -0500 | received badge | ● Popular Question (source) |
| 2019-03-28 15:31:03 -0500 | edited question | openni_launch problem with Kinect xbox 360 in Melodic on RockPro64 Kinect xbox 360 in Melodic with Openni Difficulty with openni_launch on getting turtlebot running in Melodic in Ubuntu 1 |
| 2019-03-28 15:28:04 -0500 | edited question | openni_launch problem with Kinect xbox 360 in Melodic on RockPro64 Kinect xbox 360 in Melodic with Openni Difficulty with openni_launch on getting turtlebot running in Melodic in Ubuntu 1 |
| 2019-03-28 15:26:16 -0500 | asked a question | openni_launch problem with Kinect xbox 360 in Melodic on RockPro64 Kinect xbox 360 in Melodic with Openni Working on getting turtlebot running in Melodic in Ubuntu 18.04 on a RockPro64. I |
| 2019-03-26 11:12:45 -0500 | received badge | ● Enthusiast |
| 2019-03-25 22:01:07 -0500 | commented question | How to do GMapping and SLAM Navigation using RPLIDAR A2 and Kobuki? Did y'all try the hokuyo tutorials, I think adding any lidar is similar process. I had luck doing an analogous ydlidar a |
| 2019-03-25 21:59:40 -0500 | answered a question | How to do GMapping and SLAM Navigation using RPLIDAR A2 and Kobuki? I was able to update my Turtlebot 2 (with Create 2 Base) to a 360 degree YDLidar to use for navigation. I made a copy o |
| 2019-03-25 21:46:23 -0500 | received badge | ● Editor (source) |
| 2019-03-25 21:46:23 -0500 | edited answer | libEGL.so missing while building melodic on ARM ubuntu 18.04 I resolved this by first going into the /usr/lib/aarch64-linux-gnu directory and observing there was a libEGL.so symlink |
| 2019-03-25 21:40:12 -0500 | received badge | ● Popular Question (source) |
| 2019-03-25 21:40:12 -0500 | received badge | ● Famous Question (source) |
| 2019-03-25 21:40:12 -0500 | received badge | ● Notable Question (source) |
| 2018-12-27 16:08:42 -0500 | received badge | ● Notable Question (source) |
| 2018-12-27 09:08:48 -0500 | commented answer | Robot is levitating in Gazebo Thanks for your insight! I am actually the one who wrote that code (based on tutorials and trying to learn this system). |
| 2018-12-27 04:44:59 -0500 | received badge | ● Popular Question (source) |
| 2018-12-26 21:27:59 -0500 | commented question | Robot is levitating in Gazebo I noticed if I adjust the Z to be negative in the fixed joint, like this <joint name="fixed" type="fixed"> < |
| 2018-12-26 21:25:46 -0500 | commented question | Robot is levitating in Gazebo I noticed if I adjust the Z to be negative in the fixed joint, like this <joint name="fixed" type="fixed"> < |
| 2018-12-26 21:25:16 -0500 | commented question | Robot is levitating in Gazebo I noticed if I adjust the Z to be negative in the fixed joint, like this <joint name="fixed" type="fixed"> & |
| 2018-12-26 20:46:16 -0500 | asked a question | Robot is levitating in Gazebo Robot is levitating in Gazebo ROS Melodic. Latest code is here https://github.com/lukewebdev/SCARA-52900 Running: rosl |
| 2018-11-22 10:38:26 -0500 | marked best answer | libEGL.so missing while building melodic on ARM ubuntu 18.04 Got the errors below after running: I am not sure how to fix or what is wrong: |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.