The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2016-08-24 23:49:37 -0500 | received badge | ● Nice Question (source) |
| 2014-01-28 17:28:20 -0500 | marked best answer | Convert pointcloud to image hi, i have a bagfile with velodyne packets in it. I want to convert this point cloud into an image or a range image. Anyone please help me how to convert it. i went through the documentation in Tutorials/CloudToImage for converting pointcloud to image.I used the node "convert_pointcloud_to_image" But when i tried it i get an error :- Error in converting cloud to image message: No rgb field!! please help me out with this error.Is there any documentation for converting to range image ? |
| 2013-05-15 02:07:50 -0500 | received badge | ● Famous Question (source) |
| 2013-04-18 22:40:59 -0500 | received badge | ● Famous Question (source) |
| 2013-03-31 00:03:24 -0500 | received badge | ● Notable Question (source) |
| 2013-03-09 07:11:45 -0500 | marked best answer | How to visualize Point cloud ? hi, I am new to ROS.I am using Fuerte distro. I went through the tutorials and learnt the basic commands regarding packages,nodes,publish,topic,etc using turtlesim (the means by which they were explained in the tutorial). Is there any tutorial to know about reading images(from the disk) and image processing or is it possible to read image or any data only from a bag file. I have a bag file probably containing image & velodyne pointcloud data(found using rxbag) but i am not able to see any pointcloud. In the tutorial rviz was not clear for me. Please anyone help me with rviz and how to visualize the pointcloud from the bagfile. How to interpret the contents of the bagfile and use them? |
| 2013-02-01 08:35:49 -0500 | received badge | ● Famous Question (source) |
| 2013-02-01 08:35:49 -0500 | received badge | ● Notable Question (source) |
| 2013-01-11 12:46:21 -0500 | received badge | ● Famous Question (source) |
| 2013-01-05 18:52:48 -0500 | received badge | ● Popular Question (source) |
| 2012-12-19 02:42:18 -0500 | received badge | ● Notable Question (source) |
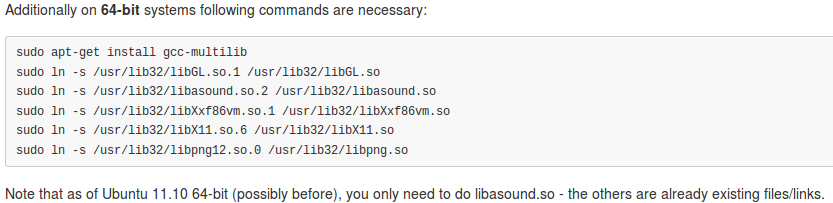
| 2012-12-18 16:31:29 -0500 | commented answer | glc installation in ubuntu 12.04 Thank u Lorenz, I followed the instuctions given there sudo add-apt-repository ppa:arand/ppa ; sudo apt-get update ; sudo apt-get install glc; after that when i do(as per http://ros.org/wiki/RecordingOpenGLA) bash glc-build.sh i get error :- bash: glc-build.sh: No such file or directory |
| 2012-12-18 16:27:20 -0500 | commented answer | glc installation in ubuntu 12.04 Thank u Ricky/usr/lib32 does not exist. But instead in usr directory lib64 exists. I tried changing the command with lib64, and now i dont get any error but in lib64 folder, when i have a look at the files(right click->properties) it says broken link. Is that ok? or should i do something else? |
| 2012-12-18 14:40:25 -0500 | received badge | ● Popular Question (source) |
| 2012-12-17 22:11:52 -0500 | asked a question | glc installation in ubuntu 12.04 I want to record the figure(point cloud) displayed in rviz as a jpeg image.I followed the instructions in http://ros.org /wiki/RecordingOpenGLAppsWithGLC (RecordingOpenGLAppsWithGLC) but unable to install.
while following the steps as shown in screenshot i get an error:-
any thoughts ?? |
| 2012-12-12 16:19:52 -0500 | commented answer | PCL Visualizer error Please pour in ur suggestions for this another question at : http://answers.ros.org/question/50146/mapping-between-pointcloud-and-image/ |
| 2012-12-12 16:17:25 -0500 | commented answer | PCL Visualizer error here it is :-http://answers.ros.org/question/49978/package-using-pcl-make-error/ |
| 2012-12-12 05:48:23 -0500 | received badge | ● Popular Question (source) |
| 2012-12-10 17:06:41 -0500 | asked a question | Mapping between pointcloud and image Hi everyone, For the past few days I have been working to use pointcloud information and the corresponding RGB image of the scene so that I can get a 1 to 1 mapping between objects present in both. I really could not figure it out. I had this idea(below), please share ur views about modifying or completely changing it. The aim is to mark objects in both (pointcloud and corresponding RGB image of scene) with a box of same color for same objects. First I thought of extracting the shape features of objects from the edges. For similar objects the shape features are going to remain more or less the same(based on orientation). Edge detection is possible only in a 2D image which I obviously did for the RGB image. How to do edge detection in a pointcloud which is 3D representation of the scene? In a 3D pointcloud viewed in the same direction as the image is facing will definitely have objects whose shape or boundary look similar. Yes if you look at pointcloud at a different angle than the view of image ,the objects may appear to be of different shapes( eg, bus moving forward infront of you in RGB image(2D) will look squarer but when viewed sideways in pointcloud(3D) looks rectangular) So I thought of converting the 3D pointcloud into a 2D image in the same viewing direction of RGB image(so that edges could be found). Is it really possible to represent the 3D pointcloud as a 2D image essentially depicting the surfaces and objects present. If yes, how to do it? All these pictures of pointcloud which I see in the Internet are like 3D objects with various shapes in a 2D plane. Are these 2D or a snapshot from the 3D viewer of various softwares??? Eagerly awaiting for ur ideas and views about this problem. I went through the documentation in http://www.ros.org/wiki/pcl_ros/Tutorials/CloudToImage (Tutorials/CloudToImage) for converting pointcloud to image.I used the node "convert_pointcloud_to_image" But when i tried it i get an error :- Error in converting cloud to image message: No rgb field!! In the above are they trying to represent 3D world in a 2D image(that is what i need) or are they just trying change its type to that of sensor_msgs/Image?? I dont know if my approach is correct but please pour in your thoughts about doing this pointcloud to objects in image mapping in some other way if its better or simpler than my approach. Will be truly grateful to you. Thank you, Karthik |
| 2012-12-09 13:07:32 -0500 | received badge | ● Notable Question (source) |
| 2012-12-09 02:20:46 -0500 | received badge | ● Commentator |
| 2012-12-09 02:18:09 -0500 | commented answer | Convert pointcloud to image thank you Ben. I tried it from the link u mentioned. The range image seems to be jittery(size of image changing randomly but ofcourse visible) when i publish a stream of pointcloud from bagfile. Is there any documentation for converting to just a 2D image (representing the 3D shapes from pointcloud) |
| 2012-12-09 00:43:10 -0500 | received badge | ● Scholar (source) |
| 2012-12-09 00:42:26 -0500 | commented answer | How to visualize Point cloud ? yes i can see the point cloud after changing as u said. What does fixed frame signify?Why should it be set to /velodyne? |
| 2012-12-09 00:39:51 -0500 | answered a question | Package using pcl make error hi, I solved the error http://answers.ros.org/question/39444/pcl-visualizer-error/?answer=39744#post-id-39744 (from answers.ros.org) .Now I am able to build the package without any error. |
| 2012-12-09 00:26:35 -0500 | received badge | ● Famous Question (source) |
| 2012-12-08 17:29:04 -0500 | commented answer | PCL Visualizer error hi gpsinghsandhu, i have the same problem. i tried adding to CMakeLists as u mentioned. i get an error :-Cannot specify link libraries for target "pcl_tutorial" which is not built by this project.In ur case pcl_viz is the name of your package or the node(program.cpp)??a detailed qn s my account,HELP |
| 2012-12-08 17:07:40 -0500 | commented answer | how to install PCL on ubuntu hi joq, I installed standalone pcl 1.6(prebuilt binaries)but /opt/ros/fuerte/include directory i see a folder called pcl-1.5... and in my package when i make it, i get an error vtkImageViewer.h not found....should i uninstall pcl1.6 and install pcl1.5?? a more detailed question in my accountHELP PLS |
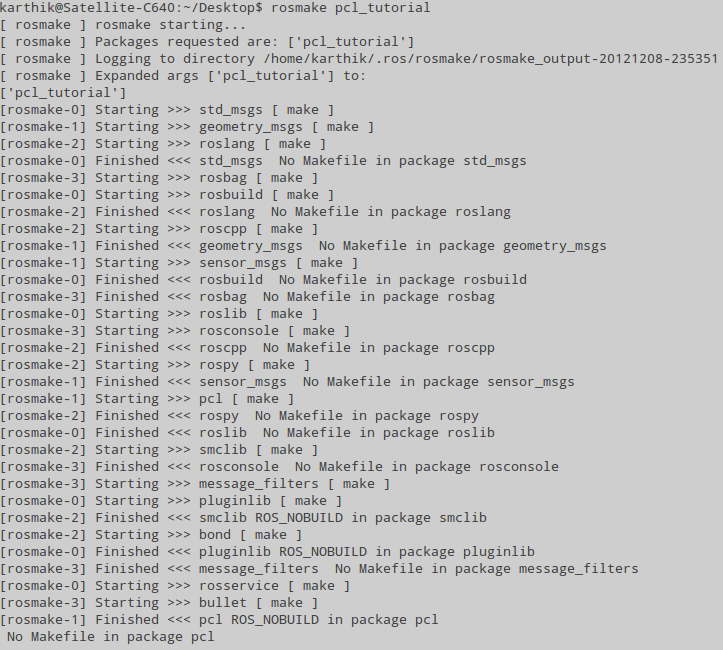
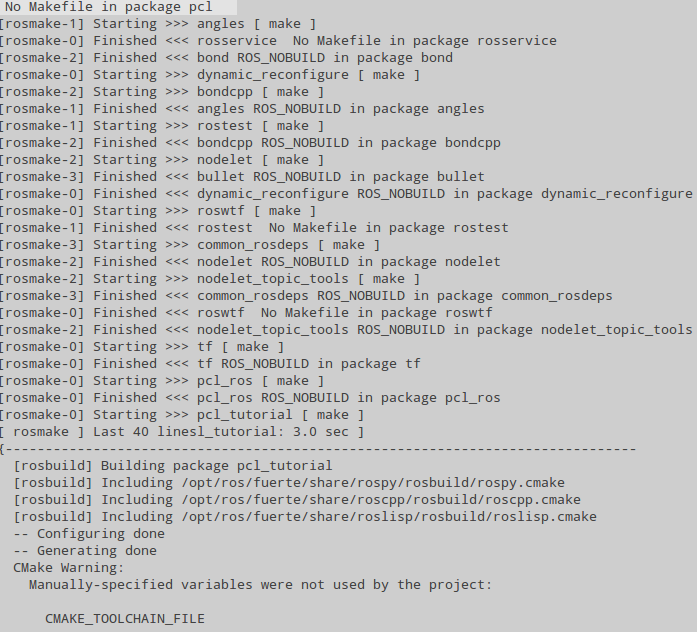
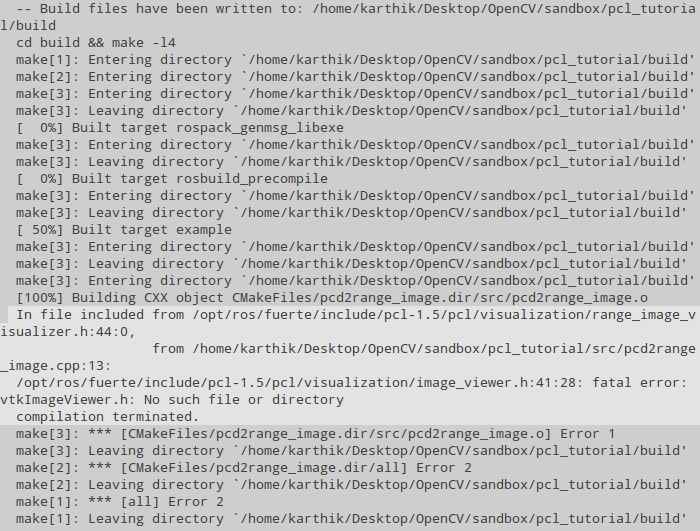
| 2012-12-08 16:34:42 -0500 | edited question | Package using pcl make error hi, I used a source code from http://www.pointclouds.org/documentation/tutorials/range_image_visualization.php#range-image-visualization (pcl/range_image & visualization) in my ROS package(pcl_tutorial) to create a range image. But when i make the package, i get an error In file included from /opt/ros/fuerte/include/pcl-1.5/pcl/visualization/range_image_visualizer.h:44:0, from /home/karthik/Desktop/OpenCV/sandbox/pcl_tutorial/src/pcd2range_image.cpp:13: /opt/ros/fuerte/include/pcl-1.5/pcl/visualization/image_viewer.h:41:28: fatal error: vtkImageViewer.h: No such file or directory compilation terminated.
I have highlighted the lines which i think has the error. Please help me out with this error. I would like to make you know that :- as in the highlighted lines /opt/ros/fuerte/pcl-1.5/pcl/visualization/image_viewer.h ,i checked out the directory, which is named pcl-1.5. But i installed pcl from http://www.pointclouds.org/downloads/linux.html (pcl/Downloads) (prebuilt binaries) which happens to be pcl-1.6(as seen in ubuntu software center) And the error vtkImageViewer.h , from my synaptics package manager, i found vtk has dependencies of pcl 1.6 which are installed and pcl 1.5 which are not installed. Should i uninstall all pcl-1.6 packages and install pcl-1.5 because my ROS uses pcl-1.5(as i assume from the above) or should i reinstall vtk5.8.0-5(as seen from synaptic package manager) is there any other way?? please help me out. |
| 2012-12-08 12:26:04 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.