The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2017-03-20 08:19:51 -0500 | commented answer | Rosserial and Arduino resets It didn't work ... I am using rosserrial-indigo and still have the same issue |
| 2017-03-18 12:59:06 -0500 | commented answer | Cannot build hector_localization Thank you ! ... I had the same issue ... I couldn't fix it using geographic-info ... It only worked using the apt command above. |
| 2017-02-27 07:17:52 -0500 | received badge | ● Enthusiast |
| 2015-09-18 18:51:22 -0500 | marked best answer | Knowrob_common package functionality &use ? hi... i was reading the Knowrob tutorials...and when i reached the section of Exporting knowledge into owl files at Loading Files And Ros Packages ..i had a problem... i already made an owl file through the protege....but it's classes aren't like that
it is like that
it says that -at the tutorials - i can do "that" by using Knowrob_common through owl_export module...My first question is "that" refers to adding the knowrob meaning to my classes ??..to be more obvious is that is the operation of exporting knowledge to owl file is to gave the meaning to the classes at my owl file and it converting my file to have that "&knowrob"?? My Second Question is where can i find the illustration of knowrob_common..ty for helping ^_^ |
| 2014-01-28 17:28:59 -0500 | marked best answer | How can i know my gyro part number?& can i perform navigation without gyro sensor ? hi..we are a graduation project team works on the turtlebot ..we already bought icreate robot and we designed the the rest plates of the turtlebot and we had the sdk as it is available and on our way to start calibration we found that we have to know our gyro part number which as the following tutorial Calibrate Odometry and Gyro how can we know our gyro part number through our icreate robot base ?? answer was as Mr Ryan said :
Editing :- |
| 2013-09-03 17:57:18 -0500 | received badge | ● Famous Question (source) |
| 2013-06-14 04:02:34 -0500 | received badge | ● Notable Question (source) |
| 2013-05-18 01:16:46 -0500 | received badge | ● Famous Question (source) |
| 2013-05-08 01:13:43 -0500 | received badge | ● Famous Question (source) |
| 2013-05-07 08:53:58 -0500 | received badge | ● Famous Question (source) |
| 2013-05-06 23:48:04 -0500 | received badge | ● Notable Question (source) |
| 2013-05-06 21:27:45 -0500 | commented answer | how can i save my map permanently ? ops!!!...i am sorry to ask such naive question :( .. it was such a lack of concentration .. thanks very much ^_^ |
| 2013-05-06 12:59:36 -0500 | commented answer | how can i save my map permanently ? u mean to change the command from:- "rosrun map_server map_saver -f /tmp/my_map" to this one ? |
| 2013-05-05 23:03:55 -0500 | received badge | ● Popular Question (source) |
| 2013-05-05 04:53:16 -0500 | asked a question | how can i save my map permanently ? hey everyone , hope you are all fine . After 2 months of working on our turtlebot to build our map using GMapping we finally today were able to build our map successfully and were able to navigate on it using Autonomous navigation but we are afraid to turn off our laptops O.o we are afraid that the map disappear by shutting down the operating system (because it happens every time :( )so is there any way to save the map permanently. please need help :( |
| 2013-03-17 23:57:17 -0500 | received badge | ● Popular Question (source) |
| 2013-03-12 05:24:44 -0500 | received badge | ● Notable Question (source) |
| 2013-03-11 07:40:18 -0500 | commented question | Can i build map and navigate without gyro ? i'll thx ^_^ |
| 2013-03-11 07:30:03 -0500 | received badge | ● Popular Question (source) |
| 2013-03-11 06:55:37 -0500 | commented question | Can i build map and navigate without gyro ? @dornhege Thank you very much sir... i will read and try understand these two parts and i'll try to check for our odometry and range sensors according to these techniques on the lab tomorrow and i'll put the feedback on comment ...thanks again..can i tag you sir after putting the feedback ? |
| 2013-03-11 06:41:41 -0500 | commented question | Can i build map and navigate without gyro ? i am counting on the irobot create base odometry ... i don't have any external device |
| 2013-03-11 06:32:34 -0500 | commented question | Can i build map and navigate without gyro ? @dornhege i am using kinect sensor with irobot create base with gmapping .. without gyro sensor...and tracking the building of the map through rviz |
| 2013-03-11 02:59:30 -0500 | asked a question | Can i build map and navigate without gyro ?
why we couldn't get accurate map ? we are thinking because we don't have gyro sensor we think that the robot can't recognize the directions or something like that because while our process to build the map the robot can recognize moving (forward/backward) but can't recognize (left/right) directions so we need to know |
| 2013-03-02 21:36:54 -0500 | received badge | ● Famous Question (source) |
| 2013-02-26 19:56:10 -0500 | asked a question | Problem at installing roboearth stack i had some issues in my os so i had to uninstall it and reinstall ubuntu 12.04 and fuerte again but when i was trying to install roboearth stack from this tutorial RoboEarth Stack i got this :- what that error suppose to mean ?.. is this link out of date or something ? |
| 2013-02-19 23:53:15 -0500 | received badge | ● Famous Question (source) |
| 2013-02-19 23:39:04 -0500 | commented answer | problem building my map using SLAM i have edited the question and added a video from my workstation ... if you have any comments sir ..thank you ^_^ |
| 2013-02-19 23:38:52 -0500 | commented answer | problem building my map using SLAM i have edited the question and added a video from my workstation ... if you have any comments sir ..thank you ^_^ |
| 2013-02-19 23:38:37 -0500 | commented answer | problem building my map using SLAM i have edited the question and added a video from my workstation ... if you have any comments sir ..thank you ^_^ |
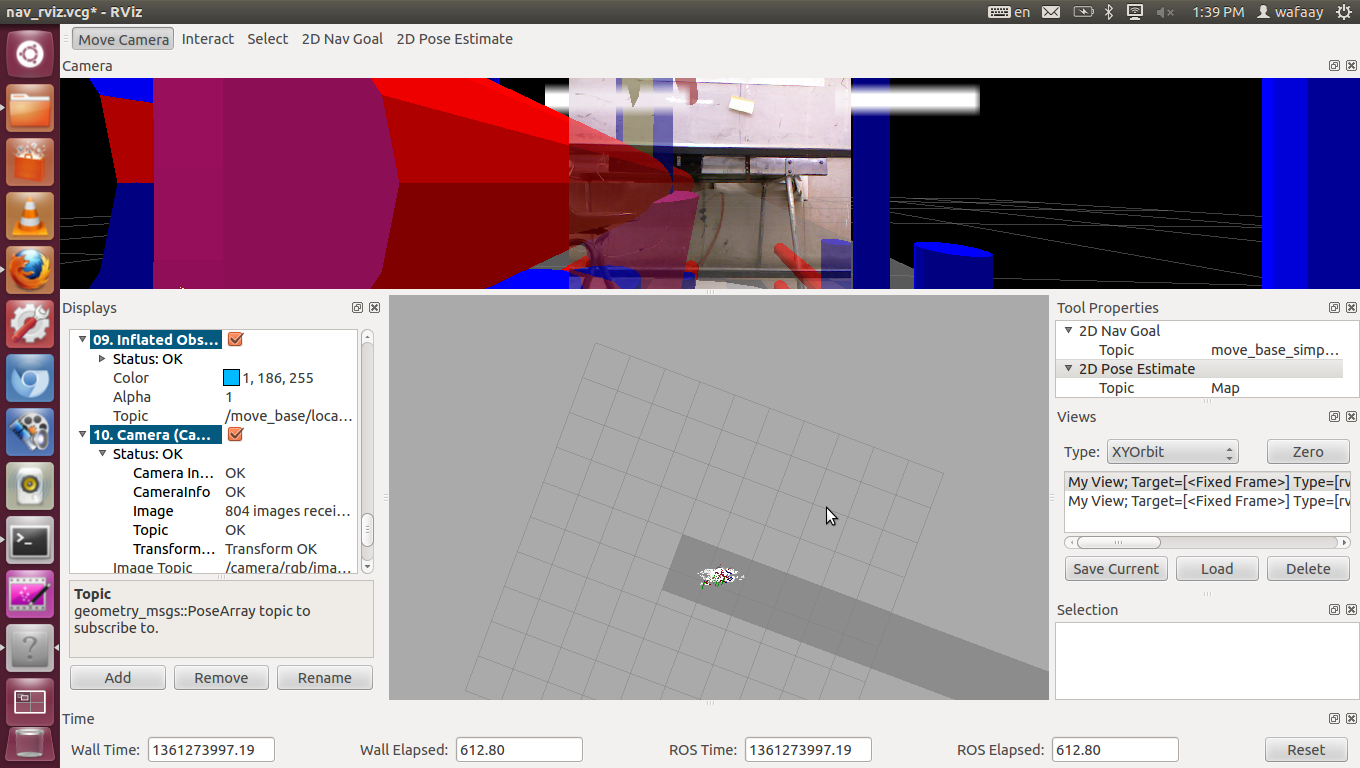
| 2013-02-19 23:37:31 -0500 | edited question | problem building my map using SLAM I was trying to build my environment map using SLAM from this Building a map with SLAMturtorial using my icreate base + kinect and yesterday at after many trials i got this picture and got (my_map.pgm & my_map.yaml) :-
and when i closed and tried to build another one from the beginning i didn't get any map i've tried many times but without any new results i always get this empty view on rviz :-
without building my map on rviz ..so is there any tips about what may went wrong with me ?...thanks in advance i have added a video of my work :- this video is from my workstation :- Workstation Rviz interface |
| 2013-02-19 23:11:02 -0500 | commented answer | problem building my map using SLAM thank you very much ..i'll try it and write down the feedback here to help the others with the same problem |
| 2013-02-19 18:27:49 -0500 | commented answer | problem building my map using SLAM no i didn't use ointcloud_to_laserscan package at the first picture or second picture ... so can you give me any tip about how to use this package ? |
| 2013-02-19 18:25:14 -0500 | commented answer | problem building my map using SLAM no it is not a white patch it is just the axes and the corresponding tf nodes ... and i moved my base many times forward and backward....but i got not map :( |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.