The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2019-09-11 03:29:08 -0500 | received badge | ● Famous Question (source) |
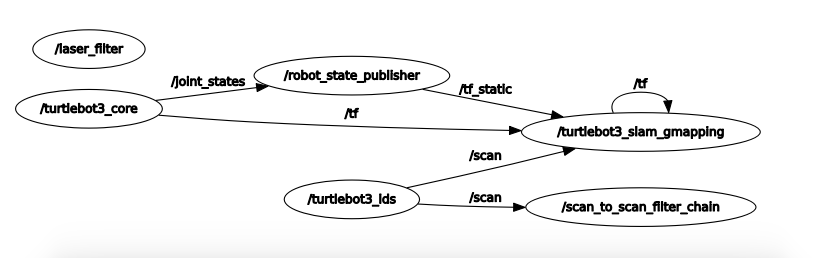
| 2019-08-19 14:55:53 -0500 | marked best answer | Configuring turtlebot3_slam_gmapping Is there a way to unsubscribing the turtlebot3_slam_gmapping node from the topic /scan and in place of that, subscribing turtlebot3_slamp_gmapping to a topic published by /scan_to_scan_filter_chain ? To elaborate, I want SLAM node to get filtered information from the node scan_to_scan_filter_chain rather than the original information from the /turtlebot_lds. rqt_graph:
|
| 2019-08-08 08:05:18 -0500 | received badge | ● Famous Question (source) |
| 2018-08-02 16:32:37 -0500 | received badge | ● Notable Question (source) |
| 2018-08-02 13:31:42 -0500 | received badge | ● Supporter (source) |
| 2018-08-01 11:17:17 -0500 | edited question | Configuring turtlebot3_slam_gmapping Configuring turtlebot3_slam_gmapping Is there a way to unsubscribing the turtlebot3_slam_gmapping node from the topic /s |
| 2018-08-01 11:16:57 -0500 | received badge | ● Enthusiast |
| 2018-08-01 08:50:08 -0500 | received badge | ● Popular Question (source) |
| 2018-07-31 21:52:59 -0500 | commented question | Configuring turtlebot3_slam_gmapping @jayess nope, I'm just asking about changing the topic of subscription for turtlebot3_slam_gmapping from turtlebot3_lds |
| 2018-07-31 21:50:24 -0500 | edited question | Configuring turtlebot3_slam_gmapping Configuring turtlebot3_slam_gmapping Is there a way to unsubscribing the turtlebot3_slam_gmapping node from the topic /s |
| 2018-07-31 18:44:05 -0500 | edited question | Configuring turtlebot3_slam_gmapping Configuring turtlebot3_slam_gmapping Is there a way to unsubscribing the turtlebot3_slam_gmapping node from the topic /s |
| 2018-07-31 18:43:04 -0500 | asked a question | Configuring turtlebot3_slam_gmapping Configuring turtlebot3_slam_gmapping Is there a way to unsubscribing the turtlebot3_slamp_gmapping node from the topic / |
| 2018-07-31 17:24:29 -0500 | edited question | How to include laser_filters node in turtlebot3_slam.launch? How to include laser_filters node in turtlebot3_slam.launch? Actually, I want to visualize the data from the 3D-Laser se |
| 2018-07-31 16:11:30 -0500 | received badge | ● Student (source) |
| 2018-07-31 16:11:14 -0500 | received badge | ● Notable Question (source) |
| 2018-07-31 16:10:03 -0500 | commented question | How to include laser_filters node in turtlebot3_slam.launch? @destogl, here's the image link of rqt_graph. Thanks https://drive.google.com/file/d/1Mt7HGy93h2jL6Jj5dCMAqv52UtOUQs9Q/v |
| 2018-07-30 09:42:32 -0500 | commented question | How to include laser_filters node in turtlebot3_slam.launch? I don't know about "base_scan" @destogi, I have not changed anything after the installation from the ROS official tutori |
| 2018-07-29 19:07:25 -0500 | received badge | ● Popular Question (source) |
| 2018-07-29 18:08:54 -0500 | edited question | How to include laser_filters node in turtlebot3_slam.launch? How to include laser_filters node in turtlebot3_slam.launch? Actually, I want to visualize the data from the 3D-Laser se |
| 2018-07-29 17:47:30 -0500 | commented question | How to include laser_filters node in turtlebot3_slam.launch? Thanks @jayess, I have put the texts now. |
| 2018-07-29 17:46:34 -0500 | edited question | How to include laser_filters node in turtlebot3_slam.launch? How to include laser_filters node in turtlebot3_slam.launch? Actually, I want to visualize the data from the 3D-Laser se |
| 2018-07-29 17:45:52 -0500 | edited question | How to include laser_filters node in turtlebot3_slam.launch? How to include laser_filters node in turtlebot3_slam.launch? Actually, I want to visualize the data from the 3D-Laser se |
| 2018-07-29 17:45:03 -0500 | edited question | How to include laser_filters node in turtlebot3_slam.launch? How to include laser_filters node in turtlebot3_slam.launch? Actually, I want to visualize the data from the 3D-Laser se |
| 2018-07-29 17:45:03 -0500 | received badge | ● Editor (source) |
| 2018-07-29 16:59:27 -0500 | edited question | How to include laser_filters node in turtlebot3_slam.launch? How to include laser_filters node in turtlebot3_slam.launch? Actually, I want to visualize the data from the 3D-Laser se |
| 2018-07-29 16:58:57 -0500 | asked a question | How to include laser_filters node in turtlebot3_slam.launch? How to include laser_filters node in turtlebot3_slam.launch? Actually, I want to visualize the data from the 3D-Laser se |
| 2018-07-29 15:19:19 -0500 | commented answer | Applying restrictions on 360-degree LiDAR for slam and autonomous navigation Hello, I edited the turtlebot3_slam.launch and put a node for laser_filters over there. Furthermore, I created another f |
| 2018-07-29 15:18:44 -0500 | commented answer | Applying restrictions on 360-degree LiDAR for slam and autonomous navigation Hello, I edited the turtlebot3_slam.launch and put a node for laser_filters over there. Furthermore, I created another f |
| 2018-07-29 15:18:31 -0500 | commented answer | Applying restrictions on 360-degree LiDAR for slam and autonomous navigation Hello, I edited the turtlebot3_slam.launch and put a node for laser_filters over there. Furthermore, I created another f |
| 2018-07-23 18:16:59 -0500 | commented answer | robot state publisher error When I tried to run the commanded, it gave me the following error. E: Unable to locate package ros-hydro-robot-state-pub |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.