The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-09-27 11:57:51 -0500 | received badge | ● Famous Question (source) |
| 2021-09-27 11:57:51 -0500 | received badge | ● Notable Question (source) |
| 2021-09-27 11:57:51 -0500 | received badge | ● Popular Question (source) |
| 2020-12-15 19:29:20 -0500 | received badge | ● Famous Question (source) |
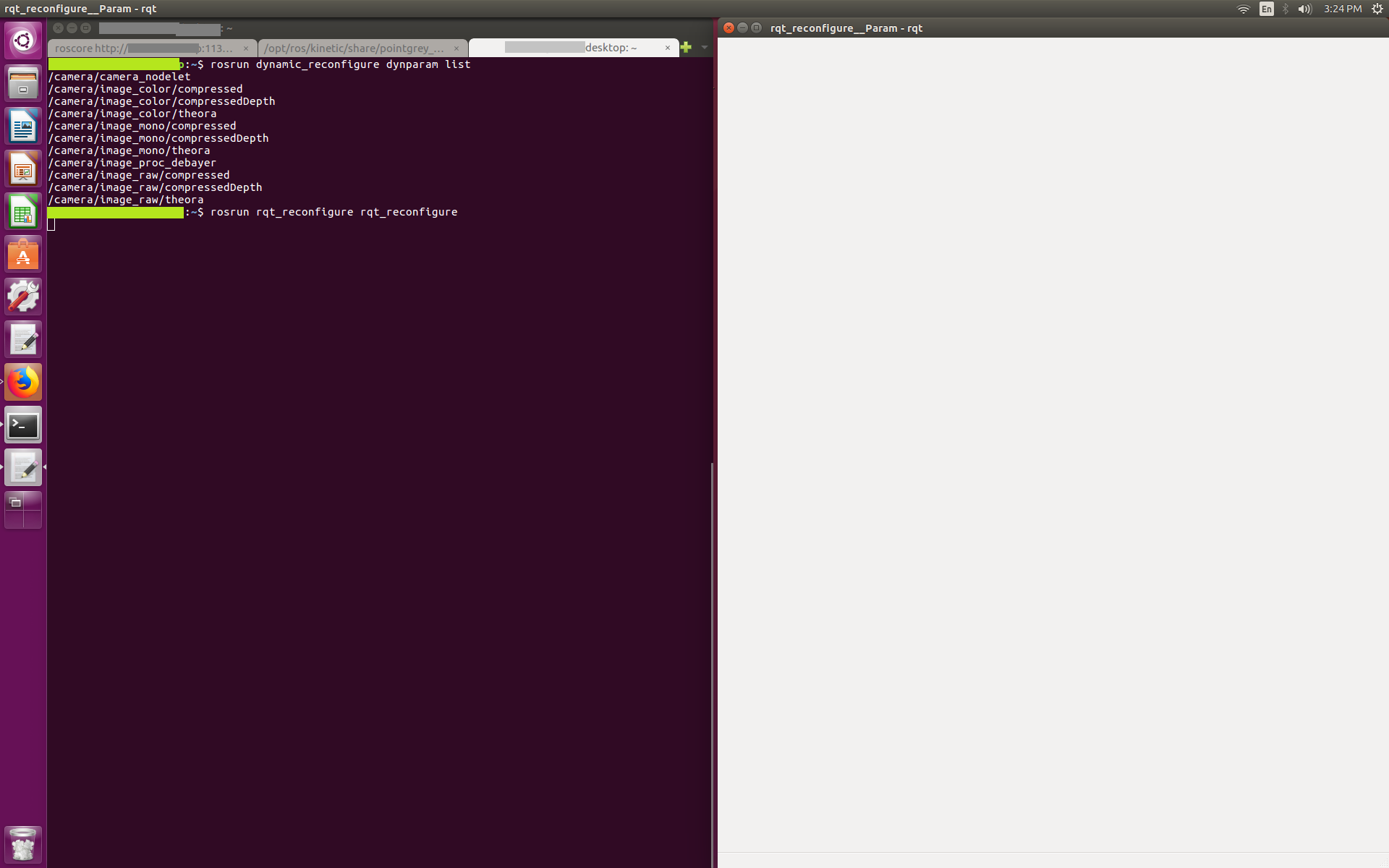
| 2020-05-06 16:53:44 -0500 | marked best answer | rqt_reconfigure window is totally empty Hi, rqt_reconfigure looks working badly on my computer. It shows a totally empty window. It is showing no parameter, no grid, and no command window. Nothing. Thank you in advance.
|
| 2019-12-06 13:27:23 -0500 | received badge | ● Famous Question (source) |
| 2019-09-24 11:05:22 -0500 | received badge | ● Notable Question (source) |
| 2019-09-24 11:05:22 -0500 | received badge | ● Popular Question (source) |
| 2019-09-05 08:08:58 -0500 | received badge | ● Notable Question (source) |
| 2019-09-05 08:08:58 -0500 | received badge | ● Popular Question (source) |
| 2019-06-27 21:45:51 -0500 | asked a question | How to capture dark object in a bright environment How to capture dark object in a bright environment Hi, I am looking for a method which can recognize the dark object in |
| 2019-06-18 18:24:43 -0500 | commented question | rqt_reconfigure window is totally empty Thank you for your comment Geoff. The problem is solved. When I right click at the empty window, the option appeared. (F |
| 2019-06-18 18:20:11 -0500 | received badge | ● Famous Question (source) |
| 2019-06-13 15:06:12 -0500 | edited question | rqt_reconfigure window is totally empty rqt_reconfigure window is totally empty Hi, rqt_reconfigure looks working badly on my computer. It shows a totally empt |
| 2019-06-13 15:04:28 -0500 | asked a question | rqt_reconfigure window is totally empty rqt_reconfigure window is totally empty Hi, rqt_reconfigure looks working badly on my computer. It shows a totally empt |
| 2019-04-08 13:42:47 -0500 | received badge | ● Nice Answer (source) |
| 2019-03-20 14:30:44 -0500 | asked a question | How to indicate MarkerArray topic and Path topic on web browser? How to indicate MarkerArray topic and Path topic on web browser? Hi, I am trying to indicate my robot position(nav_msgs |
| 2019-03-20 11:18:09 -0500 | received badge | ● Notable Question (source) |
| 2019-03-20 10:50:41 -0500 | edited answer | How to run Robot web tools at Non Internet environment? Simple solution. Download JS's by 'wget' command and change the pass in the code. CDN server is stopping now for some re |
| 2019-03-20 10:50:41 -0500 | received badge | ● Editor (source) |
| 2019-03-20 10:36:01 -0500 | commented question | How do you launch image_proc? First, did you source? $ source /opt/ros/melodic/devel/setup.bash Second, try to set the NAMESPACE. For example, if y |
| 2019-03-20 10:34:22 -0500 | commented question | How do you launch image_proc? First, did you source? $ source /opt/ros/melodic/devel/setup.bash Second, try to set the NAMESPACE. For example, if y |
| 2019-03-20 00:20:26 -0500 | received badge | ● Popular Question (source) |
| 2019-03-19 23:53:58 -0500 | received badge | ● Scholar (source) |
| 2019-03-19 23:00:48 -0500 | received badge | ● Self-Learner (source) |
| 2019-03-19 23:00:48 -0500 | received badge | ● Teacher (source) |
| 2019-03-19 23:00:45 -0500 | marked best answer | How to run Robot web tools at Non Internet environment? Hi, I am trying to create some widgets for RobotWebTools to monitor/control my robot on the Web browser remotely. According to the nav2djs(one of the widgets of the RobotWebTools) tutorial, the HTML code was shown. So, I decided to use this code as a Base and modify for my original. The code includes the line as below. Thank you in advance. |
| 2019-03-19 21:30:52 -0500 | answered a question | How to run Robot web tools at Non Internet environment? Simple solution. Download JS's by 'wget' command and change the pass in the code. CDN server is stopping now for some re |
| 2019-03-19 21:10:48 -0500 | commented question | How to run Robot web tools at Non Internet environment? Oh! I have just forgotten the wonderful command in Ubuntu "wget" till your comment. Thanks! |
| 2019-03-19 20:47:08 -0500 | received badge | ● Student (source) |
| 2019-03-19 17:29:55 -0500 | asked a question | How to run Robot web tools at Non Internet environment? How to run Robot web tools at Non Internet environment? Hi, I am trying to create some widgets for RobotWebTools to mon |
| 2019-03-09 10:29:13 -0500 | received badge | ● Famous Question (source) |
| 2019-03-06 12:05:17 -0500 | asked a question | RViz display error on Path topic RViz display error on Path topic Hi, I'm having trouble showing Path topic on RViz. 1. The line should be smooth. Howeve |
| 2019-03-02 10:55:29 -0500 | received badge | ● Famous Question (source) |
| 2019-02-11 10:16:12 -0500 | commented answer | What is the best way to monitor and Remote control the Robot from Tablet? Thank you for your wonderful additional advice! |
| 2019-02-09 18:10:43 -0500 | received badge | ● Notable Question (source) |
| 2019-02-09 01:08:40 -0500 | received badge | ● Popular Question (source) |
| 2019-02-08 08:30:07 -0500 | commented answer | What is the best way to monitor and Remote control the Robot from Tablet? Thank you so much for your answer. Your job sounds wonderful! If you don't mind, could you tell me more detail? For exam |
| 2019-02-08 08:24:56 -0500 | received badge | ● Enthusiast |
| 2019-02-07 13:27:13 -0500 | marked best answer | Can't subscribe message from SICK LMS151 at 25 Hz Hi all, I am using the LMS1xx pkg to obtain laser measurements from a sick LMS-151 laser. The pkg works good at 50 Hz frequency. However, if I change it to 25 Hz by SOPAS ET, message never comes out. Also, "stop" lamp and "OK" lamp on the laser it self alternately flashes. I found below from the source code. I thought this is the reason why it does not work good at 25 Hz. So, I changed 5000 to 2500. However, now the program stopped by some kind of memory Error. Does any one have an idea to solve this problem? Best Yoshi UPDATE 7/19/18 The memory error which I wrote above disappeared once I restarted the computer. Sorry for the confusing information. It won't stop with error, just publishing no message forever. I checked the sensor with SOPAS which is SICK software. There are some Monitor system and it looks no problem in both 50Hz and 25Hz. The lamp on the sensor was lighting up only "OK" continuously at that time. Also, "STOP" lamp never flashes while I read the message beyond ROS at 50Hz. Thank you |
| 2019-02-07 13:02:40 -0500 | asked a question | What is the best way to monitor and Remote control the Robot from Tablet? What is the best way to monitor and Remote control the Robot from Tablet? Hi, I'm trying to make some Tablet GUI which |
| 2018-11-21 12:49:29 -0500 | received badge | ● Notable Question (source) |
| 2018-11-21 12:49:29 -0500 | received badge | ● Popular Question (source) |
| 2018-11-21 12:47:42 -0500 | received badge | ● Famous Question (source) |
| 2018-11-02 12:13:10 -0500 | asked a question | How to get high frequency position data from GPS and IMU How to get high frequency position data from GPS and IMU Hi all, I am using u-blox C94-M8P as a GPS receiver and Vector |
| 2018-07-25 16:32:07 -0500 | answered a question | Can't subscribe message from SICK LMS151 at 25 Hz I have found a solution! Just clone and build the source below. Thanks to muhrix. https://github.com/muhrix/lms1xx Than |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.