The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-08-12 03:54:41 -0500 | commented answer | Error when building package of calibration_publisher while installing Autoware Great, this works for me too. Basically adding opencv libraries path in CMakeLists.txt and package.xml fixed my issue. |
| 2020-10-27 07:32:27 -0500 | received badge | ● Famous Question (source) |
| 2020-06-08 08:53:47 -0500 | received badge | ● Notable Question (source) |
| 2020-01-20 10:16:34 -0500 | received badge | ● Popular Question (source) |
| 2019-12-27 07:48:14 -0500 | commented answer | Different tf tree while running the bagfile from start and middle Ok thanks, I got what you are saying, maybe in future they can publish that /tf_static topic, from whenever bagfile star |
| 2019-12-27 06:21:25 -0500 | received badge | ● Student (source) |
| 2019-12-27 05:54:38 -0500 | commented answer | Different tf tree while running the bagfile from start and middle Thanks a lot for the clearification of latched topics and working of /tf_static. But I would like to ask that, if I want |
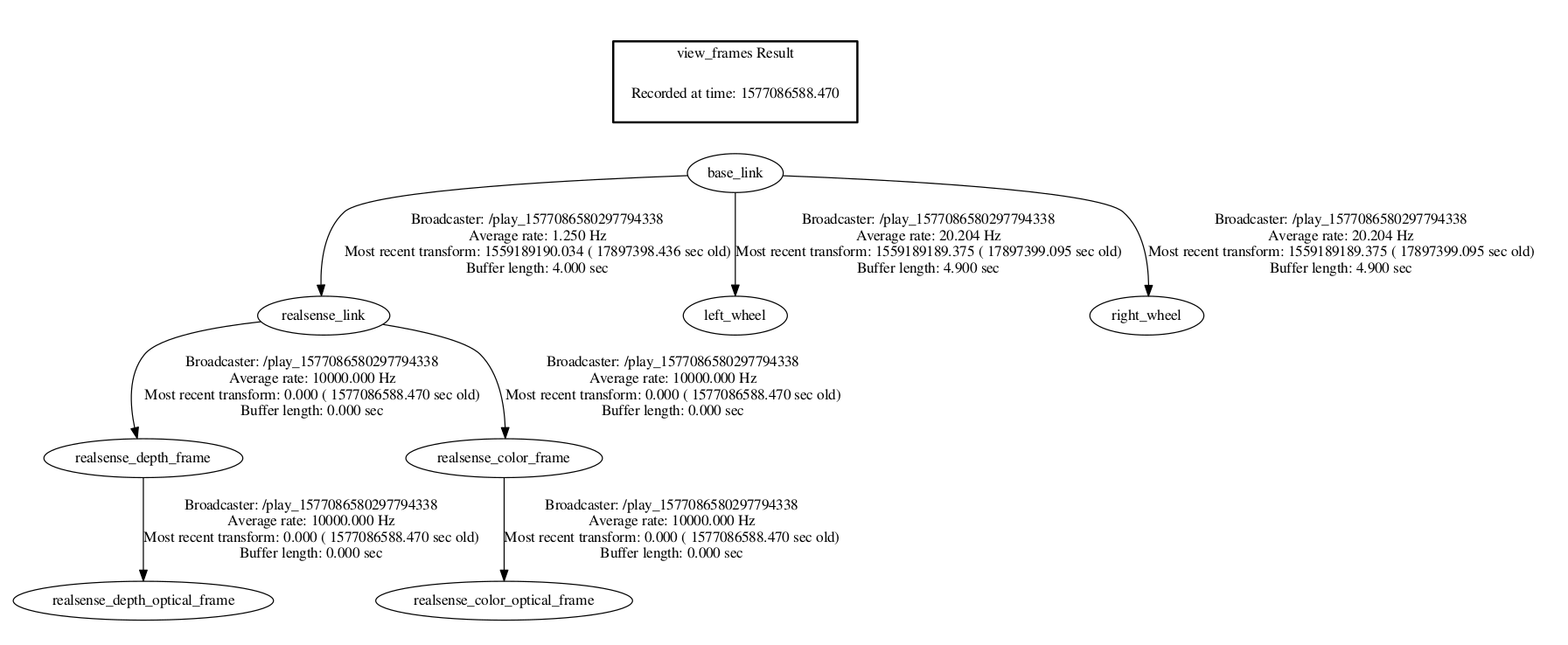
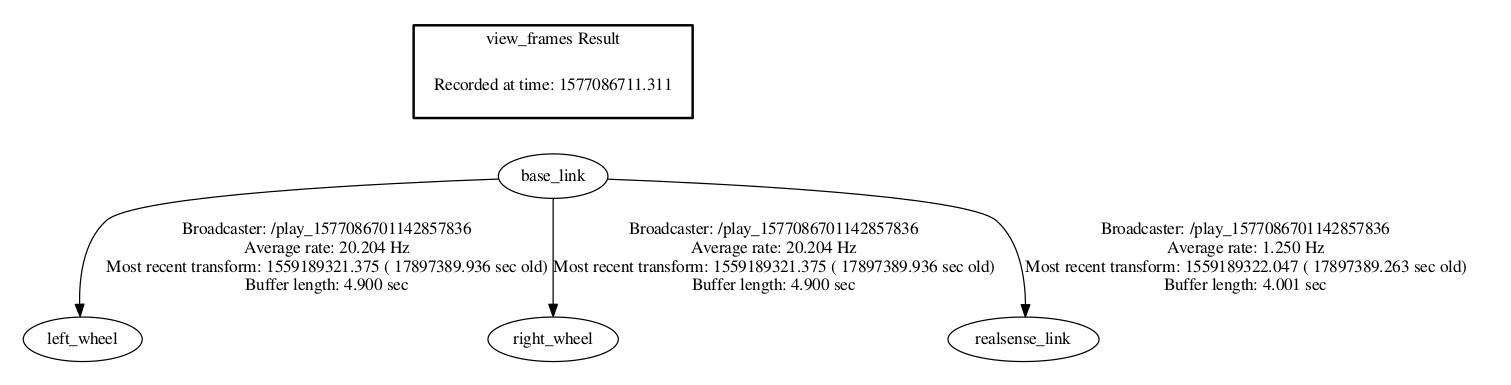
| 2019-12-27 05:45:16 -0500 | marked best answer | Different tf tree while running the bagfile from start and middle So, I have this wierd bug that, whenever I tried to play this particular bagfile from the start then I have all the correct tf frames present in the tf tree, but when I tried to play the bagile from the middle then certain tf frames got lost.
Bagfile played from the start: |
| 2019-12-26 07:33:11 -0500 | asked a question | Different tf tree while running the bagfile from start and middle Different tf tree while running the bagfile from start and middle So, I have this wierd bug that, whenever I tried to pl |
| 2019-09-25 23:25:43 -0500 | received badge | ● Famous Question (source) |
| 2019-09-25 23:25:43 -0500 | received badge | ● Notable Question (source) |
| 2019-09-25 23:25:43 -0500 | received badge | ● Popular Question (source) |
| 2019-06-04 14:59:44 -0500 | commented answer | Accessing translation data from geometry_msgs::TransformStamped Worked like a charm. But why it cant say Expected argument is string but given double, then debugging would be a lot ea |
| 2019-06-04 14:57:34 -0500 | marked best answer | Accessing translation data from geometry_msgs::TransformStamped I want to access the x, y, z values and quaternion values in a geometry_msgs/TransformStamped.msg , so my subsrciber looks like: So while printing So why it is saying |
| 2019-06-04 14:57:34 -0500 | received badge | ● Scholar (source) |
| 2019-06-04 14:00:00 -0500 | asked a question | Accessing translation data from geometry_msgs::TransformStamped Accessing translation data from geometry_msgs::TransformStamped I want to access the x, y, z values and quaternion value |
| 2019-05-03 13:31:02 -0500 | commented answer | Playing back large files with rosbag Your local hard disk would be SSD then, if it takes less than a second to play 7.5 GB file. For 123 GB bag file, it took |
| 2019-05-03 12:55:34 -0500 | commented answer | Playing back large files with rosbag Your local hard disk would be SSD then, if it takes less than a second to play 7.5 GB file. For 123 GB bag file, it took |
| 2018-10-10 08:37:19 -0500 | answered a question | Which package is best for slam and Kinect? Go for RTABMAP, it is the best practical slam out there in all type of sensors and robots. See the comparison in section |
| 2018-07-06 13:32:33 -0500 | commented answer | How do you remap a topic? I think it is also necessary for the previous and the new topic to publish message of the same type for remap to work. |
| 2018-07-06 04:18:45 -0500 | received badge | ● Enthusiast |
| 2018-06-30 06:38:33 -0500 | received badge | ● Supporter (source) |
| 2018-06-30 01:03:43 -0500 | edited answer | Could not find Qt binding (looked for: 'pyqt', 'pyside') when rosrun I had the same issue, when I ran rosrun rqt_graph rqt_graph , then it searches for QtCore in the pyqt and pyside module |
| 2018-06-30 01:03:43 -0500 | received badge | ● Editor (source) |
| 2018-06-29 03:32:36 -0500 | edited answer | Could not find Qt binding (looked for: 'pyqt', 'pyside') when rosrun I had the same issue, when I ran rosrun rqt_graph rqt_graph , then it searches for QtCore in the pyqt and pyside module |
| 2018-06-29 03:25:20 -0500 | answered a question | Could not find Qt binding (looked for: 'pyqt', 'pyside') when rosrun I had the same issue, when I ran rosrun rqt_graph rqt_graph , then it searches for QtCore in the pyqt and pyside module |
| 2018-06-25 23:44:11 -0500 | answered a question | Kill other roscore/master processes on bourn shell I also went through the same problem. I launched the roscore & command in the background in a terminal. Later |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.