The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-03-24 11:19:23 -0500 | received badge | ● Famous Question (source) |
| 2019-12-19 20:13:00 -0500 | received badge | ● Notable Question (source) |
| 2019-11-23 10:26:54 -0500 | received badge | ● Popular Question (source) |
| 2019-06-17 02:18:46 -0500 | received badge | ● Famous Question (source) |
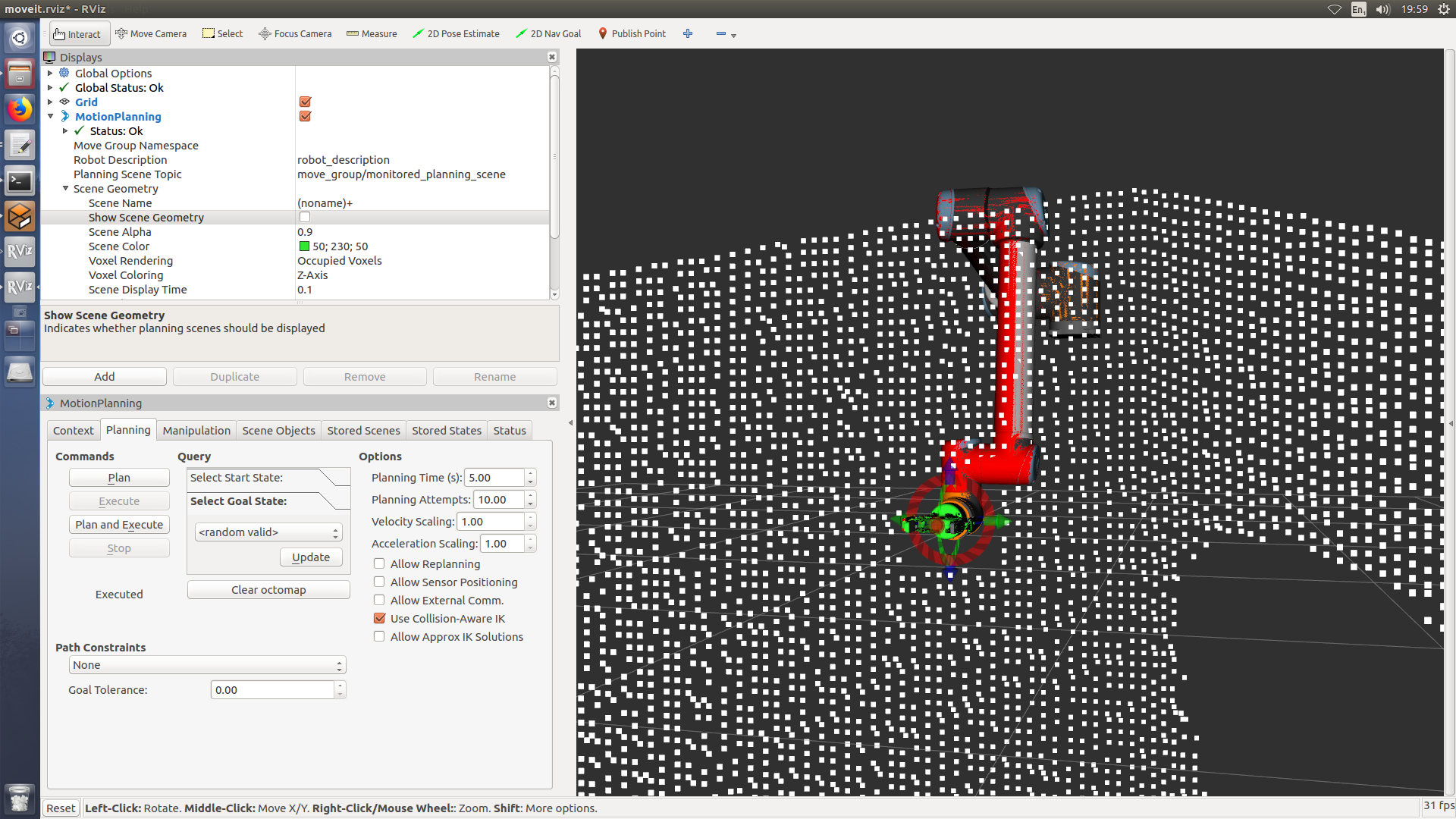
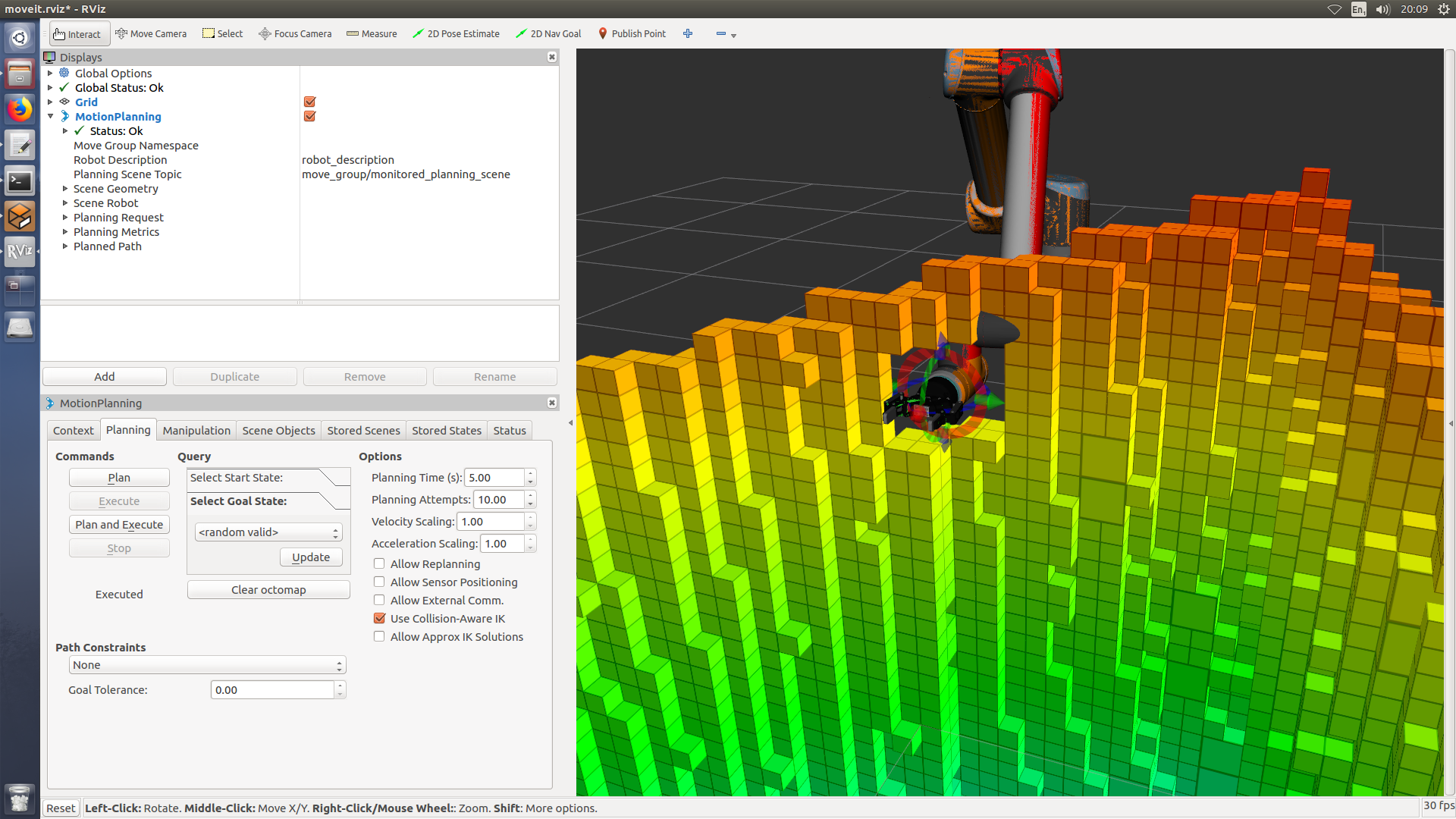
| 2019-02-26 15:07:38 -0500 | marked best answer | Moveit! self_filter from octomap working for robotiq gripper but not UR5/UR10 body System: Ubuntu 16.04 / ROS Kinetic / Nuvo-5095GC-022 / Universal Robots UR10 Packages: freenect_stack, geometry2, libfreenect, perception_pcl, trac_ik, universal_robot, ur_modern_driver Hi, Some background: As part of a dynamic collision avoidance project I'm trying to achieve full visibility of a live scene using multiple Kinect cameras. In the current setup I have two Xbox Kinect V1s, each producing a working point cloud. The cameras are positioned with a 90deg offset and the frames have been linked using tf2, so the points match up relatively well in 3D (cameras are intrinsically calibrated). From there i have used the two point clouds to create an octomap that the robot plans to avoid. Now that i've got the live octomap sorted i'm running into problems with the integrated self_filter function inside Moveit!, in that only the gripper is being filtered from the scene regardless of the padding/offset values used. If i view the filtered_cloud topic as a point cloud 2, it clearly illustrates the problem.
It's almost like the robot urdf is being ignored due to the addition of the end effector? UPDATE (01/11/2018). Observations:
Any ideas? My sensors.yaml file looks like: And my urdf: |
| 2019-02-26 14:54:42 -0500 | asked a question | What is the /move_group/sense_for_plan/max_look_attempts param? What is the /move_group/sense_for_plan/max_look_attempts param? System: Ubuntu 16.04 / ROS Kinetic / Nuvo-5095GC-022 / U |
| 2019-02-26 14:15:27 -0500 | answered a question | Moveit! self_filter from octomap working for robotiq gripper but not UR5/UR10 body Solved this a little while ago but have had a break from the project since. As much as it pains me to say it, the issue |
| 2019-01-07 08:21:40 -0500 | received badge | ● Famous Question (source) |
| 2019-01-03 04:55:41 -0500 | received badge | ● Notable Question (source) |
| 2018-11-01 07:57:52 -0500 | received badge | ● Notable Question (source) |
| 2018-11-01 06:38:44 -0500 | edited question | Moveit! self_filter from octomap working for robotiq gripper but not UR5/UR10 body Moveit! self_filter from octomap working for robotiq gripper but not UR5/UR10 body System: Ubuntu 16.04 / ROS Kinetic / |
| 2018-11-01 05:29:54 -0500 | edited question | Moveit! self_filter from octomap working for robotiq gripper but not UR5/UR10 body Moveit! self_filter from octomap working for robotiq gripper but not UR5/UR10 body System: Ubuntu 16.04 / ROS Kinetic / |
| 2018-11-01 05:27:30 -0500 | edited question | Moveit! self_filter from octomap working for robotiq gripper but not UR5/UR10 body Moveit! self_filter from octomap working for robotiq gripper but not UR5/UR10 body System: Ubuntu 16.04 / ROS Kinetic / |
| 2018-11-01 05:23:45 -0500 | edited question | Moveit! self_filter from octomap working for robotiq gripper but not UR5/UR10 body Moveit! self_filter from octomap working for robotiq gripper but not UR5/UR10 body System: Ubuntu 16.04 / ROS Kinetic / |
| 2018-10-31 15:54:53 -0500 | commented question | Moveit! self_filter from octomap working for robotiq gripper but not UR5/UR10 body It doesn't, no. I've noticed that I'm getting the error 'Dropping first 1 trajectory point(s) out of ##, as they occur b |
| 2018-10-31 07:51:24 -0500 | received badge | ● Popular Question (source) |
| 2018-10-31 06:47:28 -0500 | edited question | Moveit! self_filter from octomap working for robotiq gripper but not UR5/UR10 body Moveit! self_filter from octomap working for robotiq gripper but not UR10 body System: Ubuntu 16.04 / ROS Kinetic / Nuvo |
| 2018-10-31 05:20:59 -0500 | edited question | Moveit! self_filter from octomap working for robotiq gripper but not UR5/UR10 body Moveit! self filter working for robotiq gripper but not UR10 body System: Ubuntu 16.04 / ROS Kinetic / Nuvo-5095GC-022 / |
| 2018-10-31 04:23:27 -0500 | received badge | ● Organizer (source) |
| 2018-10-30 16:11:01 -0500 | marked best answer | Can't display occupied voxels octomap using pointcloud2 Fairly new to this so let me know if there's a better way of doing things! I'm attempting dynamic collision avoidance with a Kinect V1 and the ur5 moveit package on ROS kinetic. The PC is running Ubuntu 16.04 and i have the following packages installed:
I've been following the ROS tutorial on perception/configuration (link below) in an effort to have moveit process the point cloud into an octomap and display the occupied voxels: http://docs.ros.org/kinetic/api/movei... And am also aware of this other thread which is extremely similar, however i wasn't able to achieve a working result using just the information here: https://answers.ros.org/question/1957... I have Openni working so can visualise the pointcloud2 okay in moveit and have completed all the steps in the above, including altering the sensor_manager.launch.yaml files. However when i echo the planning scene topic, The moveit! config files used can be found at: ( https://github.com/nis-ur/ur_kinect_m... ) As requested, the terminal log when i launch ur5 planning: |
| 2018-10-30 16:09:41 -0500 | marked best answer | Can monitored planning scene subscribe to multiple point clouds System: Ubuntu 16.04 / ROS Kinetic / Nuvo-5095GC-022 / Universal Robots UR10 Packages: freenect_stack, geometry2, libfreenect, perception_pcl, trac_ik, universal_robot, ur_modern_driver Hi, As part of a dynamic collision avoidance project I'm trying to achieve full visibility of a live scene using multiple Kinect cameras. In the current setup I have two Xbox Kinect V1s, each producing a working point cloud. The cameras are positioned with a 90deg offset and the frames have been linked using tf2, so the points match up relatively well in 3D (cameras are intrinsically calibrated). From there I want to use both point clouds to create an octomap that the robot will plan to avoid. My question: Is it possible to have the planning scene monitor subscribe to both point cloud 2 topics so it can create the octomap? Or do I have to concatenate the two point clouds using PCL before the planning scene monitor can read a single combined point cloud and create the octomap? Thanks in advance! |
| 2018-10-30 16:09:41 -0500 | received badge | ● Scholar (source) |
| 2018-10-30 16:09:14 -0500 | received badge | ● Popular Question (source) |
| 2018-10-30 16:08:59 -0500 | commented answer | Can monitored planning scene subscribe to multiple point clouds Apologies for the late response. I haven't had chance to test out both options suggested, however i've found using multi |
| 2018-10-30 16:08:25 -0500 | edited question | Moveit! self_filter from octomap working for robotiq gripper but not UR5/UR10 body Moveit! self filter working for robotiq gripper but not UR10 body System: Ubuntu 16.04 / ROS Kinetic / Nuvo-5095GC-022 / |
| 2018-10-30 15:53:05 -0500 | asked a question | Moveit! self_filter from octomap working for robotiq gripper but not UR5/UR10 body Moveit! self filter working for robotiq gripper but not UR10 body System: Ubuntu 16.04 / ROS Kinetic / Nuvo-5095GC-022 / |
| 2018-10-16 06:32:49 -0500 | received badge | ● Enthusiast |
| 2018-10-09 06:03:08 -0500 | commented answer | Can monitored planning scene subscribe to multiple point clouds Thanks very much @gvdhoorn , really appreciate the level of detail (and the corrections!) in your answer. Using multipl |
| 2018-10-09 03:23:38 -0500 | asked a question | Can monitored planning scene subscribe to multiple point clouds Can monitored planning scene subscribe to multiple point clouds System: Ubuntu 16.04 / ROS Kinetic / Nuvo-5095GC-022 / U |
| 2018-08-05 03:54:43 -0500 | answered a question | Can't display occupied voxels octomap using pointcloud2 Hi, I finally managed to get this fixed, thanks a lot @Thadeu Brito and @aaditya_saraiya for your input. The problem tur |
| 2018-07-17 05:58:37 -0500 | received badge | ● Famous Question (source) |
| 2018-07-16 13:38:55 -0500 | commented answer | Can't display occupied voxels octomap using pointcloud2 Hi Thadeu. As requested i've inserted the code from launching planning/rviz and have included a link to my github page w |
| 2018-07-16 13:37:00 -0500 | edited question | Can't display occupied voxels octomap using pointcloud2 Can't display occupied voxels octomap using pointcloud2 Fairly new to this so let me know if there's a better way of doi |
| 2018-07-16 13:36:24 -0500 | edited question | Can't display occupied voxels octomap using pointcloud2 Can't display occupied voxels octomap using pointcloud2 Fairly new to this so let me know if there's a better way of doi |
| 2018-07-16 13:36:15 -0500 | received badge | ● Editor (source) |
| 2018-07-16 13:36:15 -0500 | edited question | Can't display occupied voxels octomap using pointcloud2 Can't display occupied voxels octomap using pointcloud2 Fairly new to this so let me know if there's a better way of doi |
| 2018-07-16 13:33:17 -0500 | edited question | Can't display occupied voxels octomap using pointcloud2 Can't display occupied voxels octomap using pointcloud2 Fairly new to this so let me know if there's a better way of doi |
| 2018-07-16 10:22:35 -0500 | received badge | ● Notable Question (source) |
| 2018-07-16 09:45:35 -0500 | commented answer | Kinect with UR5 avoiding collisions Hi Thadeu, thanks for the reply. This is my question: https://answers.ros.org/question/295061/cant-display-occupied-voxe |
| 2018-07-16 09:34:56 -0500 | commented answer | Kinect with UR5 avoiding collisions Hi Thadeu, thanks for the reply. This is my question: https://answers.ros.org/question/295061/cant-display-occupied-voxe |
| 2018-07-13 03:26:36 -0500 | commented answer | Kinect with UR5 avoiding collisions Hi @Thadeu Brito, apologies for re-opening this thread a year later. How did you manage to make the OctoMap work? Can y |
| 2018-07-13 02:46:54 -0500 | commented answer | Moveit execution fails - invalid joints Apologies for digging this back up so long after the original post, but where were the joints found to be missing from, |
| 2018-07-05 03:31:41 -0500 | received badge | ● Popular Question (source) |
| 2018-06-22 12:06:28 -0500 | asked a question | Can't display occupied voxels octomap using pointcloud2 Can't display occupied voxels octomap using pointcloud2 Fairly new to this so let me know if there's a better way of doi |
| 2018-06-22 11:51:39 -0500 | received badge | ● Supporter (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.