| 2021-02-15 14:40:22 -0500 | received badge | ● Necromancer
(source)
|
| 2015-12-01 04:53:24 -0500 | received badge | ● Commentator
|
| 2015-12-01 04:53:24 -0500 | commented answer | undefined reference to a static library |
| 2014-10-23 07:07:38 -0500 | commented question | /robot_pose_ekf debug messages Yes, for me only performance problem. encoder and scan data both correct.
seems you only play with simulation, it shall be gazebo setting problem. |
| 2014-10-23 05:47:58 -0500 | commented question | /robot_pose_ekf debug messages Hi,I solved the problem. use high performance laptop/pc and use ethernet cable, as Kinect node publish huge amount data, if use rviz to visualizer. :) |
| 2014-03-15 07:47:14 -0500 | received badge | ● Nice Question
(source)
|
| 2014-02-18 10:12:50 -0500 | received badge | ● Famous Question
(source)
|
| 2013-11-11 00:52:04 -0500 | received badge | ● Notable Question
(source)
|
| 2013-11-03 15:18:04 -0500 | commented answer | move_base error: Unable to lookup transform, cache is empty Hi Abulbra, can parse your code here? if your wired connection can access the internet, try disable it. |
| 2013-10-27 22:33:18 -0500 | received badge | ● Famous Question
(source)
|
| 2013-10-27 22:33:17 -0500 | received badge | ● Notable Question
(source)
|
| 2013-10-27 22:33:17 -0500 | received badge | ● Popular Question
(source)
|
| 2013-10-26 07:32:42 -0500 | received badge | ● Popular Question
(source)
|
| 2013-10-06 05:18:33 -0500 | received badge | ● Notable Question
(source)
|
| 2013-09-29 09:08:11 -0500 | received badge | ● Self-Learner
(source)
|
| 2013-09-29 09:08:11 -0500 | received badge | ● Teacher
(source)
|
| 2013-09-29 04:52:08 -0500 | commented question | move_base error: Unable to lookup transform, cache is empty problem solved. it is due to slow wireless connection. change to wire connect and gmapping become much better. |
| 2013-09-27 01:12:44 -0500 | received badge | ● Popular Question
(source)
|
| 2013-09-26 15:10:35 -0500 | commented answer | move_base error: Unable to lookup transform, cache is empty Hi tfoote, I understand if not use waitForTransform() , tf::TransformListener may count error. I learn from the tf tutorial :) . But all the nodes I use are from groovy original. I only create my package and launch files to load the nodes.
I updates the question. Thank you. |
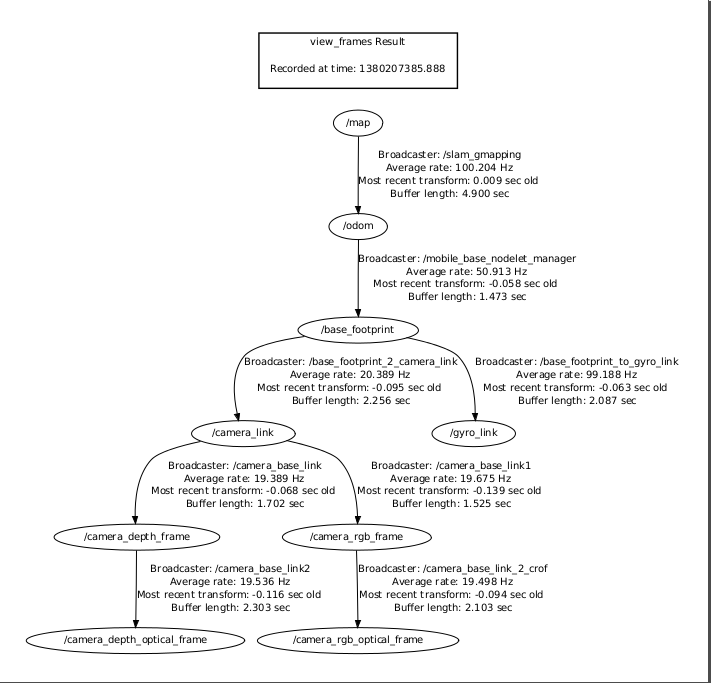
| 2013-09-26 06:02:26 -0500 | asked a question | move_base error: Unable to lookup transform, cache is empty Hi, I am using turtlebot2 (kobuki+kinect) to make the map. gmapping works ok.
but when I give the goal in rviz, move_base node omit the error below. It seems base_local_planner can not transform /odom to /map.
but I check the tf with command tf_echo, tf_monitor,tf_viewframe. no clue found. Thanks any help. I find two similar questions, but no answer. extrapolation-error-using-hector_mapping-move_base extrapolation-error-of-local-cost-map-in-navigation my tf tree: C:\fakepath\Screenshot from 2013-09-26 23:49:56.png [ WARN] [1380208610.699597142]: Could not transform the global plan to the frame of the controller
[ERROR] [1380208610.899298578]: Extrapolation Error: Unable to lookup transform, cache is empty, when looking up transform from frame [/odom] to frame [/map]
[ERROR] [1380208808.222581361]: Global Frame: /odom Plan Frame size 13: /map
rosrun tf tf_monitor RESULTS: for all Frames
Frames:
Frame: /base_footprint published by /mobile_base_nodelet_manager Average Delay: -0.0229974 Max Delay: 0.354185
Frame: /camera_depth_frame published by /camera_base_link_2_camera_depth_frame Average Delay: -0.12366 Max Delay: 0.224775
Frame: /camera_depth_optical_frame published by /camera_base_link_2_camera_depth_optical_frame Average Delay: -0.124423 Max Delay: 0.227307
Frame: /camera_link published by /base_footprint_2_camera_link Average Delay: -0.0773685 Max Delay: 0.177639
Frame: /camera_rgb_frame published by /camera_base_link_2_camera_rgb_frame Average Delay: -0.123725 Max Delay: 0.226237
Frame: /camera_rgb_optical_frame published by /camera_base_link_2_crof Average Delay: -0.124212 Max Delay: 0.192336
Frame: /gyro_link published by /base_footprint_to_gyro_link Average Delay: -0.0236702 Max Delay: 0.260833
Frame: /odom published by /slam_gmapping Average Delay: 0.000628292 Max Delay: 0.00346015
All Broadcasters:
Node: /base_footprint_2_camera_link 19.9931 Hz, Average Delay: -0.0773685 Max Delay: 0.177639
Node: /base_footprint_to_gyro_link 98.9593 Hz, Average Delay: -0.0236702 Max Delay: 0.260833
Node: /camera_base_link 10.0197 Hz, Average Delay: -0.125868 Max Delay: 0.112013
Node: /camera_base_link1 10.0197 Hz, Average Delay: -0.121158 Max Delay: 0.226237
Node: /camera_base_link2 10.0171 Hz, Average Delay: -0.126665 Max Delay: 0.0916436
Node: /camera_base_link3 10.0372 Hz, Average Delay: -0.126777 Max Delay: 0.0992249
Node: /camera_base_link_2_camera_depth_frame 10.0304 Hz, Average Delay: -0.120865 Max Delay: 0.224775
Node: /camera_base_link_2_camera_depth_optical_frame 10.0197 Hz, Average Delay: -0.122189 Max Delay: 0.227307
Node: /camera_base_link_2_camera_rgb_frame 10.0196 Hz, Average Delay: -0.126318 Max Delay: 0.092681
Node: /camera_base_link_2_crof 10.0176 Hz, Average Delay: -0.121966 Max Delay: 0.192336
Node: /mobile_base_nodelet_manager 50.2985 Hz, Average Delay: -0.0229974 Max Delay: 0.354185
Node: /slam_gmapping 100.098 Hz, Average Delay: 0.000628292 Max Delay: 0.00346015
rosrun tf tf_echo /map /odom redheli@redheli-MacBookPro:~/bagfiles$ rosrun tf tf_echo /map /odom
At time 1380209595.389
- Translation: [-0.045, 0.002, 0.000]
- Rotation: in Quaternion [0.000, 0.000, -0.011, 1.000]
in RPY [0.000, 0.000, -0.021]
At time 1380209596.389
- Translation: [-0.045, 0.002, 0.000]
- Rotation: in Quaternion [0.000, 0.000, -0.011, 1.000]
in RPY [0.000, 0.000, -0.021]
At time 1380209597.389
- Translation: [-0.045, 0.002, 0.000]
- Rotation: in Quaternion [0.000, 0.000, -0.011, 1.000]
in RPY [0.000, 0.000, -0.021]
At time 1380209598.389 ...
(more) |
| 2013-09-26 06:01:05 -0500 | asked a question | move_base error: Unable to lookup transform, cache is empty Hi, I am using turtlebot2 (kobuki+kinect) to make the map. gmapping works ok.
but when I give the goal in rviz, move_base node omit the error below. It seems base_local_planner can not transform /odom to /map.
but I check the tf with command tf_echo, tf_monitor,tf_viewframe. no clue found. Thanks any help. I find two similar questions, but no answer. extrapolation-error-using-hector_mapping-move_base extrapolation-error-of-local-cost-map-in-navigation C:\fakepath\Screenshot from 2013-09-26 23:49:56.png [ WARN] [1380208610.699597142]: Could not transform the global plan to the frame of the controller
[ERROR] [1380208610.899298578]: Extrapolation Error: Unable to lookup transform, cache is empty, when looking up transform from frame [/odom] to frame [/map]
[ERROR] [1380208808.222581361]: Global Frame: /odom Plan Frame size 13: /map
rosrun tf tf_monitor RESULTS: for all Frames
Frames:
Frame: /base_footprint published by /mobile_base_nodelet_manager Average Delay: -0.0229974 Max Delay: 0.354185
Frame: /camera_depth_frame published by /camera_base_link_2_camera_depth_frame Average Delay: -0.12366 Max Delay: 0.224775
Frame: /camera_depth_optical_frame published by /camera_base_link_2_camera_depth_optical_frame Average Delay: -0.124423 Max Delay: 0.227307
Frame: /camera_link published by /base_footprint_2_camera_link Average Delay: -0.0773685 Max Delay: 0.177639
Frame: /camera_rgb_frame published by /camera_base_link_2_camera_rgb_frame Average Delay: -0.123725 Max Delay: 0.226237
Frame: /camera_rgb_optical_frame published by /camera_base_link_2_crof Average Delay: -0.124212 Max Delay: 0.192336
Frame: /gyro_link published by /base_footprint_to_gyro_link Average Delay: -0.0236702 Max Delay: 0.260833
Frame: /odom published by /slam_gmapping Average Delay: 0.000628292 Max Delay: 0.00346015
All Broadcasters:
Node: /base_footprint_2_camera_link 19.9931 Hz, Average Delay: -0.0773685 Max Delay: 0.177639
Node: /base_footprint_to_gyro_link 98.9593 Hz, Average Delay: -0.0236702 Max Delay: 0.260833
Node: /camera_base_link 10.0197 Hz, Average Delay: -0.125868 Max Delay: 0.112013
Node: /camera_base_link1 10.0197 Hz, Average Delay: -0.121158 Max Delay: 0.226237
Node: /camera_base_link2 10.0171 Hz, Average Delay: -0.126665 Max Delay: 0.0916436
Node: /camera_base_link3 10.0372 Hz, Average Delay: -0.126777 Max Delay: 0.0992249
Node: /camera_base_link_2_camera_depth_frame 10.0304 Hz, Average Delay: -0.120865 Max Delay: 0.224775
Node: /camera_base_link_2_camera_depth_optical_frame 10.0197 Hz, Average Delay: -0.122189 Max Delay: 0.227307
Node: /camera_base_link_2_camera_rgb_frame 10.0196 Hz, Average Delay: -0.126318 Max Delay: 0.092681
Node: /camera_base_link_2_crof 10.0176 Hz, Average Delay: -0.121966 Max Delay: 0.192336
Node: /mobile_base_nodelet_manager 50.2985 Hz, Average Delay: -0.0229974 Max Delay: 0.354185
Node: /slam_gmapping 100.098 Hz, Average Delay: 0.000628292 Max Delay: 0.00346015
rosrun tf tf_echo /map /odom redheli@redheli-MacBookPro:~/bagfiles$ rosrun tf tf_echo /map /odom
At time 1380209595.389
- Translation: [-0.045, 0.002, 0.000]
- Rotation: in Quaternion [0.000, 0.000, -0.011, 1.000]
in RPY [0.000, 0.000, -0.021]
At time 1380209596.389
- Translation: [-0.045, 0.002, 0.000]
- Rotation: in Quaternion [0.000, 0.000, -0.011, 1.000]
in RPY [0.000, 0.000, -0.021]
At time 1380209597.389
- Translation: [-0.045, 0.002, 0.000]
- Rotation: in Quaternion [0.000, 0.000, -0.011, 1.000]
in RPY [0.000, 0.000, -0.021]
At time 1380209598.389
- Translation: [-0.045 ...
(more) |
| 2013-09-26 05:59:47 -0500 | asked a question | move_base error: Unable to lookup transform, cache is empty Hi, I am using turtlebot2 (kobuki+kinect) to make the map. gmapping works ok.
but when I give the goal in rviz, move_base node omit the error below. It seems base_local_planner can not transform /odom to /map.
but I check the tf with command tf_echo, tf_monitor,tf_viewframe. no clue found. Thanks any help. I find two similar questions, but no answer. extrapolation-error-using-hector_mapping-move_base extrapolation-error-of-local-cost-map-in-navigation C:\fakepath\Screenshot from 2013-09-26 23:49:56.png [ WARN] [1380208610.699597142]: Could not transform the global plan to the frame of the controller
[ERROR] [1380208610.899298578]: Extrapolation Error: Unable to lookup transform, cache is empty, when looking up transform from frame [/odom] to frame [/map]
[ERROR] [1380208808.222581361]: Global Frame: /odom Plan Frame size 13: /map
rosrun tf tf_monitor RESULTS: for all Frames
Frames:
Frame: /base_footprint published by /mobile_base_nodelet_manager Average Delay: -0.0229974 Max Delay: 0.354185
Frame: /camera_depth_frame published by /camera_base_link_2_camera_depth_frame Average Delay: -0.12366 Max Delay: 0.224775
Frame: /camera_depth_optical_frame published by /camera_base_link_2_camera_depth_optical_frame Average Delay: -0.124423 Max Delay: 0.227307
Frame: /camera_link published by /base_footprint_2_camera_link Average Delay: -0.0773685 Max Delay: 0.177639
Frame: /camera_rgb_frame published by /camera_base_link_2_camera_rgb_frame Average Delay: -0.123725 Max Delay: 0.226237
Frame: /camera_rgb_optical_frame published by /camera_base_link_2_crof Average Delay: -0.124212 Max Delay: 0.192336
Frame: /gyro_link published by /base_footprint_to_gyro_link Average Delay: -0.0236702 Max Delay: 0.260833
Frame: /odom published by /slam_gmapping Average Delay: 0.000628292 Max Delay: 0.00346015
All Broadcasters:
Node: /base_footprint_2_camera_link 19.9931 Hz, Average Delay: -0.0773685 Max Delay: 0.177639
Node: /base_footprint_to_gyro_link 98.9593 Hz, Average Delay: -0.0236702 Max Delay: 0.260833
Node: /camera_base_link 10.0197 Hz, Average Delay: -0.125868 Max Delay: 0.112013
Node: /camera_base_link1 10.0197 Hz, Average Delay: -0.121158 Max Delay: 0.226237
Node: /camera_base_link2 10.0171 Hz, Average Delay: -0.126665 Max Delay: 0.0916436
Node: /camera_base_link3 10.0372 Hz, Average Delay: -0.126777 Max Delay: 0.0992249
Node: /camera_base_link_2_camera_depth_frame 10.0304 Hz, Average Delay: -0.120865 Max Delay: 0.224775
Node: /camera_base_link_2_camera_depth_optical_frame 10.0197 Hz, Average Delay: -0.122189 Max Delay: 0.227307
Node: /camera_base_link_2_camera_rgb_frame 10.0196 Hz, Average Delay: -0.126318 Max Delay: 0.092681
Node: /camera_base_link_2_crof 10.0176 Hz, Average Delay: -0.121966 Max Delay: 0.192336
Node: /mobile_base_nodelet_manager 50.2985 Hz, Average Delay: -0.0229974 Max Delay: 0.354185
Node: /slam_gmapping 100.098 Hz, Average Delay: 0.000628292 Max Delay: 0.00346015
rosrun tf tf_echo /map /odom redheli@redheli-MacBookPro:~/bagfiles$ rosrun tf tf_echo /map /odom
At time 1380209595.389
- Translation: [-0.045, 0.002, 0.000]
- Rotation: in Quaternion [0.000, 0.000, -0.011, 1.000]
in RPY [0.000, 0.000, -0.021]
At time 1380209596.389
- Translation: [-0.045, 0.002, 0.000]
- Rotation: in Quaternion [0.000, 0.000, -0.011, 1.000]
in RPY [0.000, 0.000, -0.021]
At time 1380209597.389
- Translation: [-0.045, 0.002, 0.000]
- Rotation: in Quaternion [0.000, 0.000, -0.011, 1.000]
in RPY [0.000, 0.000, -0.021]
At time 1380209598.389
- Translation: [-0.045 ...
(more) |
| 2013-09-24 15:30:48 -0500 | commented question | /robot_pose_ekf debug messages Thank you Jorge. use encoder for position and imu for heading is good idea. and I also notice parameter "use_imu_heading" in kobuki_node. I tested with set it ture/false, both not improve the localization. I will test without robot_pose_ekf. and open another post about my TB2 localization issue. Thank you again. |
| 2013-09-24 00:13:53 -0500 | commented question | /robot_pose_ekf debug messages Hi Jorge, I am using groovy. can tell the reason why not use robot_pose_ekf?
actually the data of /odom_combined (publish by robot_pose_ekf) is ok. I drive the TB2 around and monitor the data. |
| 2013-09-23 22:46:16 -0500 | asked a question | /robot_pose_ekf debug messages Hi, I have a kobuki mobile base and installed kinect as sensor to localization. The big problem is both gmapping and amcl are bad. the laser scan can not match the map.
and first step of troubleshoot, I find /robot_pose_ekf output a lot of repeated debug message, as below: my question is : are these msgs related to the localization issue?
Thanks. TF operating on not fully resolved frame id imu, resolving using local prefix
TF operating on not fully resolved frame id base_footprint, resolving using local prefix
AddMeasurement from odom_combined to base_footprint: (0.000000, 0.000000, 0.000000) (0.000000, 0.000000, 0.000000, 1.000000)
TF operating on not fully resolved frame id base_footprint, resolving using local prefix
TF operating on not fully resolved frame id odom_combined, resolving using local prefix
TF operating on not fully resolved frame id odom_combined, resolving using local prefix
TF operating on not fully resolved frame id base_footprint, resolving using local prefix
TF operating on not fully resolved frame id odom_combined, resolving using local prefix
lauch file: <launch>
<node pkg="robot_pose_ekf" type="robot_pose_ekf" name="robot_pose_ekf">
<!--remap from="odom" to="/mobile_base/odom" /-->
<remap from="imu_data" to="/mobile_base/sensors/imu_data" />
<remap from="robot_pose_ekf/odom" to="/odom_combined"/>
<param name="freq" value="50.0"/>
<param name="sensor_timeout" value="0.5"/>
<param name="odom_used" value="true"/>
<param name="imu_used" value="true"/>
<param name="vo_used" value="false"/>
<param name="self_diagnose" value="false"/>
<param name="output_frame" value="odom_combined"/>
</node>
</launch>
|
| 2013-08-25 15:36:23 -0500 | commented answer | How to import ROS project C++ file into QT-Creator and compile them? |
| 2013-08-24 23:40:34 -0500 | answered a question | Translate velocity from encoder count per second to meters per second wheel velocity = wheel rotation(rad/s) * wheel radius(m) |
| 2013-05-28 19:37:53 -0500 | marked best answer | How convert path point distance to real world distance? From navigation package ,I can get the a path to the goal.
but the points in the path are very close, I mean it is like: (45.0001 70.0002) , (45.0002 70.0003) ,(45.0003 70.0004) ... and the distance between those points is very small value. my question is : how convert this small value distance to real world distance with unit meter? Thank you. |
| 2013-05-28 19:37:48 -0500 | received badge | ● Scholar
(source)
|
| 2013-05-28 19:36:39 -0500 | received badge | ● Famous Question
(source)
|
| 2013-03-25 06:56:40 -0500 | received badge | ● Notable Question
(source)
|
| 2013-03-25 06:56:40 -0500 | received badge | ● Famous Question
(source)
|
| 2013-02-13 08:51:41 -0500 | received badge | ● Popular Question
(source)
|
| 2013-02-02 21:27:21 -0500 | received badge | ● Notable Question
(source)
|
| 2013-02-02 19:16:13 -0500 | received badge | ● Organizer
(source)
|
| 2013-02-02 17:20:54 -0500 | edited question | Turtlebot2 use sbpl_lattice_planner to navigate, but get "failded to find a solution" I just get the Turtlebot2. It works well with default move_base global planner. I can give the goal in rviz, and it move to the goal correctly. Now I am trying to use sbpl_lattice_planner as global planner, as I want to generate path without turning in place. I mean Turtlebot2 will move as a car like robot. 1) so I generate the motion primitive file without turning in place. https://www.dropbox.com/s/uoz1b9snfju7usz/genmprim_unicycle_005.m 2) make a new launch file ,set move_base param "base_global_planner" as "SBPLLatticePlanner" I launch the move_base and rviz without error. I can push the robot, and in rviz the turtlebot moves. localization is OK. but when I give a goal in rviz, sbpl_lattice_planner can not find the path, even the goal is just 0.1 meter straight forward of the turtlebot2. output of move_base: ... logging to /home/turtlebot/.ros/log/aaa7fbae-6da7-11e2-b8da-844bf57e1339/roslaunch-turtlebot-AO756-15972.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
�]2;/home/turtlebot/ros_workspace/turtlebot_apps/turtlebot_navigation/launch/amcl_sbpl.launch�
�[1mstarted roslaunch server http://192.168.1.6:40117/�[0m
SUMMARY
========
PARAMETERS
* /amcl/gui_publish_rate
* /amcl/initial_pose_a
* /amcl/initial_pose_x
* /amcl/initial_pose_y
* /amcl/kld_err
* /amcl/kld_z
* /amcl/laser_lambda_short
* /amcl/laser_likelihood_max_dist
* /amcl/laser_max_beams
* /amcl/laser_max_range
* /amcl/laser_model_type
* /amcl/laser_sigma_hit
* /amcl/laser_z_hit
* /amcl/laser_z_max
* /amcl/laser_z_rand
* /amcl/laser_z_short
* /amcl/max_particles
* /amcl/min_particles
* /amcl/odom_alpha1
* /amcl/odom_alpha2
* /amcl/odom_alpha3
* /amcl/odom_alpha4
* /amcl/odom_alpha5
* /amcl/odom_frame_id
* /amcl/odom_model_type
* /amcl/recovery_alpha_fast
* /amcl/recovery_alpha_slow
* /amcl/resample_interval
* /amcl/transform_tolerance
* /amcl/update_min_a
* /amcl/update_min_d
* /amcl/use_map_topic
* /camera/depthimage_to_laserscan_loader/output_frame_id
* /camera/depthimage_to_laserscan_loader/range_min
* /camera/depthimage_to_laserscan_loader/scan_height
* /camera/openni_camera_loader/depth_frame_id
* /camera/openni_camera_loader/depth_mode
* /camera/openni_camera_loader/depth_registration
* /camera/openni_camera_loader/depth_time_offset
* /camera/openni_camera_loader/image_mode
* /camera/openni_camera_loader/image_time_offset
* /camera/openni_camera_loader/rgb_frame_id
* /move_base/SBPLLatticePlanner/primitive_filename
* /move_base/TrajectoryPlannerROS/acc_lim_th
* /move_base/TrajectoryPlannerROS/acc_lim_x
* /move_base/TrajectoryPlannerROS/acc_lim_y
* /move_base/TrajectoryPlannerROS/dwa
* /move_base/TrajectoryPlannerROS/goal_distance_bias
* /move_base/TrajectoryPlannerROS/heading_lookahead
* /move_base/TrajectoryPlannerROS/holonomic_robot
* /move_base/TrajectoryPlannerROS/max_rotational_vel
* /move_base/TrajectoryPlannerROS/max_vel_x
* /move_base/TrajectoryPlannerROS/meter_scoring
* /move_base/TrajectoryPlannerROS/min_in_place_rotational_vel
* /move_base/TrajectoryPlannerROS/min_vel_x
* /move_base/TrajectoryPlannerROS/oscillation_reset_dist
* /move_base/TrajectoryPlannerROS/path_distance_bias
* /move_base/TrajectoryPlannerROS/sim_time
* /move_base/TrajectoryPlannerROS/vtheta_samples
* /move_base/TrajectoryPlannerROS/vx_samples
* /move_base/TrajectoryPlannerROS/xy_goal_tolerance
* /move_base/TrajectoryPlannerROS/yaw_goal_tolerance
* /move_base/base_global_planner
* /move_base/controller_frequency
* /move_base/global_costmap/bump/clearing
* /move_base/global_costmap/bump/data_type
* /move_base/global_costmap/bump/marking
* /move_base/global_costmap/bump/topic
* /move_base/global_costmap/footprint
* /move_base/global_costmap/footprint_padding
* /move_base/global_costmap/global_frame
* /move_base/global_costmap/inflation_radius
* /move_base/global_costmap/max_obstacle_height
* /move_base/global_costmap/observation_sources
* /move_base/global_costmap/obstacle_range
* /move_base/global_costmap/publish_frequency
* /move_base/global_costmap/raytrace_range
* /move_base/global_costmap/robot_base_frame
* /move_base/global_costmap/robot_radius
* /move_base/global_costmap/scan/clearing
* /move_base/global_costmap/scan/data_type
* /move_base/global_costmap/scan/marking
* /move_base/global_costmap/scan/topic
* /move_base/global_costmap/static_map
* /move_base/global_costmap/transform_tolerance
* /move_base/global_costmap/update_frequency
* /move_base/local_costmap/bump/clearing
* /move_base/local_costmap/bump/data_type
* /move_base/local_costmap/bump/marking
* /move_base/local_costmap/bump/topic
* /move_base/local_costmap/footprint
* /move_base/local_costmap/footprint_padding
* /move_base/local_costmap/global_frame
* /move_base/local_costmap/height
* /move_base/local_costmap/inflation_radius
�[0m[ INFO] [1359864425.904491010]: Subscribed to Topics: scan�[0m
�[0m[ INFO] [1359864425.929688201]: Requesting the map...
�[0m
�[0m[ INFO] [1359864425.932161705]: Still waiting on map...
�[0m
�[0m[ INFO] [1359864426.934195933]: Still waiting on map...
�[0m
�[33m[ WARN] [1359864427.937342467]: You have set map ...
(more) |

 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}