
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2014-05-13 02:27:19 -0500 | received badge | ● Famous Question (source) |
| 2014-03-12 13:57:26 -0500 | received badge | ● Famous Question (source) |
| 2014-01-28 17:29:33 -0500 | marked best answer | Error with pcl_ros, in ros fuerte I have a problem with pcl_ros.the problem is when you compile pcl_ros. when rosmake is used gives the following error: i try to install all dependency related with vtk, but doesn't work Any reply will be appreciated |
| 2013-12-17 00:51:49 -0500 | received badge | ● Notable Question (source) |
| 2013-10-19 10:53:22 -0500 | received badge | ● Popular Question (source) |
| 2013-10-08 17:13:54 -0500 | received badge | ● Famous Question (source) |
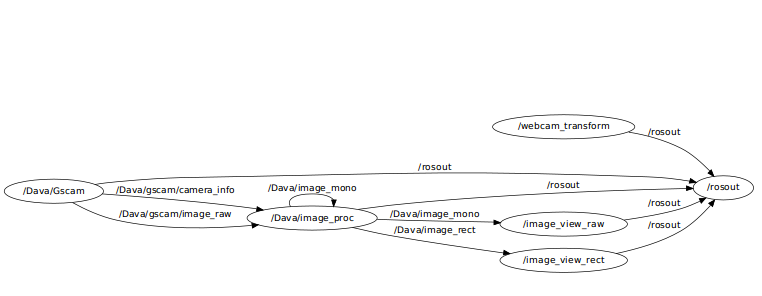
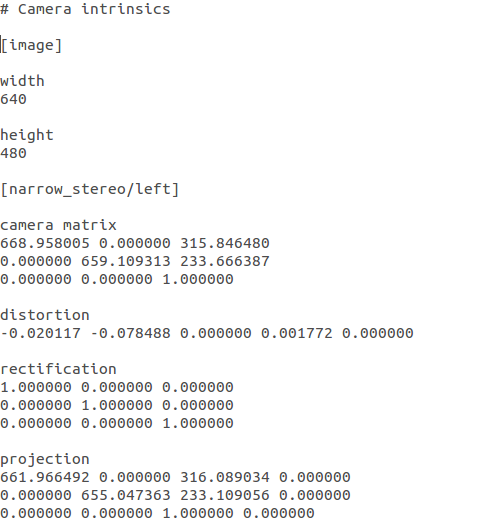
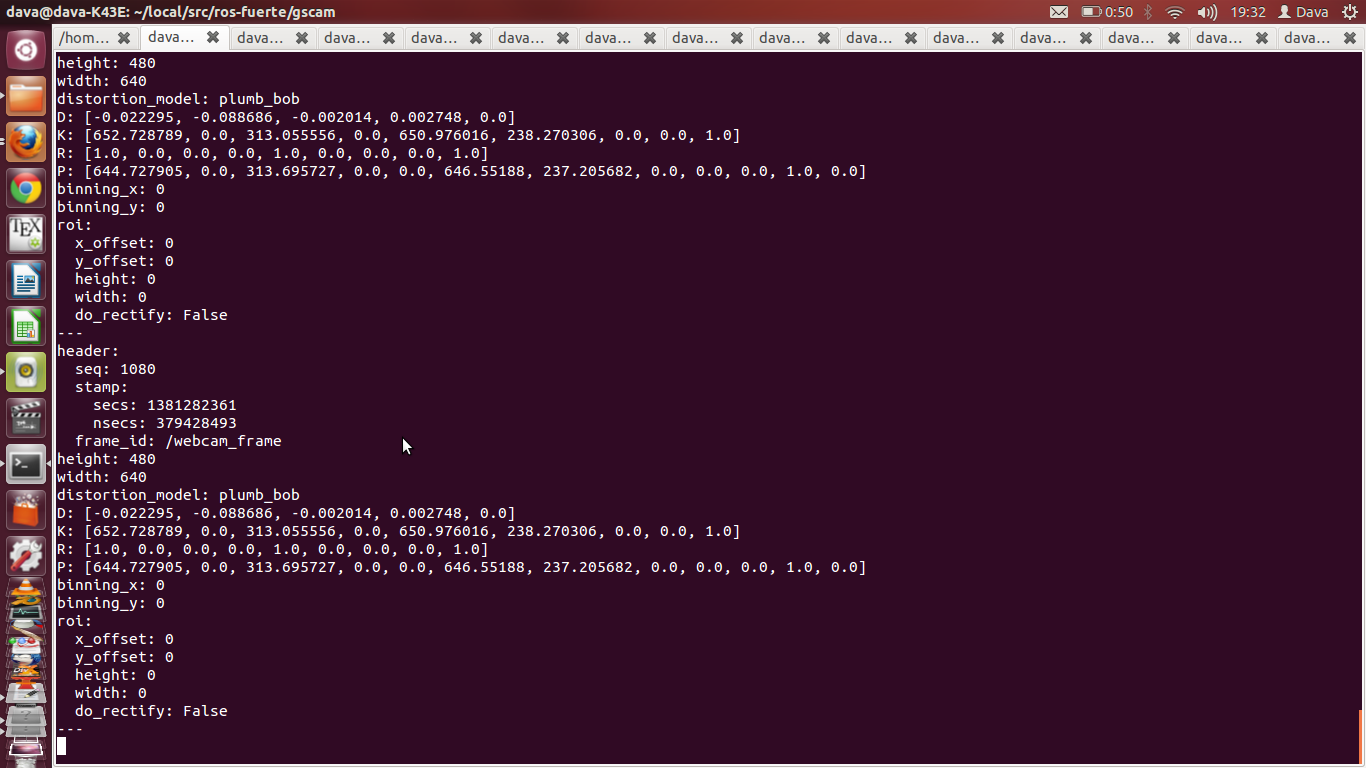
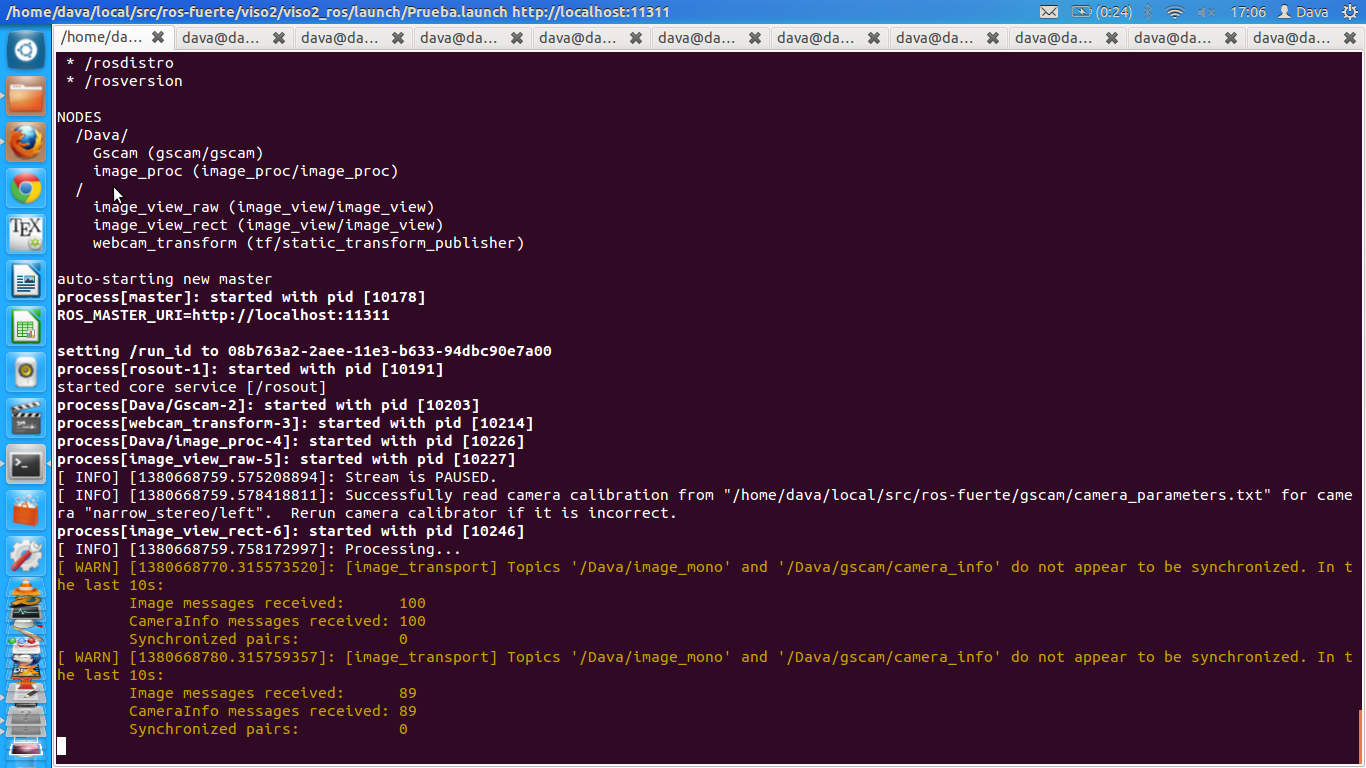
| 2013-10-08 15:39:23 -0500 | asked a question | Sync problem related to viso2. Hi All. I'm trying to setup and run Viso2 node in ros fuerte. I have a problem related to a sync warning in gscam, so I asked this question:_http://answers.ros.org/question/84611/synchronized-problem-related-to-calibration/_ When I updated the code version of GSCAM, I could see the rectify image when I used the image_view node. But my problem now is when I tried to Subscribed that topic (Image_rect) to Viso2 node, It show again the sync msg (warning message), this following message: image_transport] Topics '/Dava/image_rect_color' and '/Dava/camera_info' do not appear to be synchronized. In the last 10s: And when I used the command "rostop echo /mono_odometer/info" I don't see anything. So I don't know if the problem is with my viso2 configuration or is a problem with GSCAM. I attached the output, my camera calibration info (From rostopic echo) and rxgraph output. And you can download my lauch file in this link (): _https://mega.co.nz/#!W9pkkD5Q!NcRUbm0drgoKXXoli6rHDGUKEHBebpktfsO4Wd2tDas_ I will appreciate any respond . Thank |
| 2013-10-08 15:14:42 -0500 | commented answer | synchronized problem related to calibration I going to close this question and open a new one if I stil have this issue. Thanks @jbohren. |
| 2013-10-08 14:39:24 -0500 | received badge | ● Scholar (source) |
| 2013-10-08 14:38:37 -0500 | commented answer | synchronized problem related to calibration @jbohren, thanks it work, I could see the rectify image. But I just have another problem, when I tried to Subscribed that topic (Image_rect) to another node (Viso2). It show again the sync msg (warning message). I don't know if I'm doing something wrong with the configuration with viso2 or is gscam |
| 2013-10-08 08:15:42 -0500 | commented answer | synchronized problem related to calibration I'm going to test it this afternoon. I will let you know. |
| 2013-10-07 06:58:57 -0500 | commented answer | synchronized problem related to calibration Thank you, jbohren. |
| 2013-10-07 06:54:54 -0500 | commented answer | synchronized problem related to calibration Thank you. I will download it. Final question, one of these version works in ROS FUERTE, right? |
| 2013-10-01 22:50:15 -0500 | received badge | ● Notable Question (source) |
| 2013-10-01 14:04:08 -0500 | received badge | ● Popular Question (source) |
| 2013-10-01 09:31:50 -0500 | received badge | ● Supporter (source) |
| 2013-10-01 09:31:50 -0500 | marked best answer | Error with message_to_tf, in ros fuerte I have a problem with message_to_tf.the problem is when you compile message_to_tf. when rosmake is used gives the following error: error: /home/dava/local/src/ros-fuerte/hector_common/message_to_tf/src/message_to_tf.cpp:40:26: error: no matching function for call to ‘btMatrix3x3::btMatrix3x3(tf::Quaternion&)’ |
| 2013-10-01 09:26:58 -0500 | commented answer | Viso2 mono_odometer error Hi can any of you give an example of the launch file to run Viso2. Because i'm trying to developed that lauch file and i can't. My problem is I'm not able to generated rectified images. I just put my problem in this link:_http://answers.ros.org/question/84611/what-things-do-i-need-to-make-a-rectification-image-in-image-proc_ I will appreciate any respond . Thank you |
| 2013-10-01 08:35:54 -0500 | commented question | synchronized problem related to calibration I just uploaded |
| 2013-09-30 15:28:26 -0500 | received badge | ● Student (source) |
| 2013-09-28 16:29:53 -0500 | received badge | ● Organizer (source) |
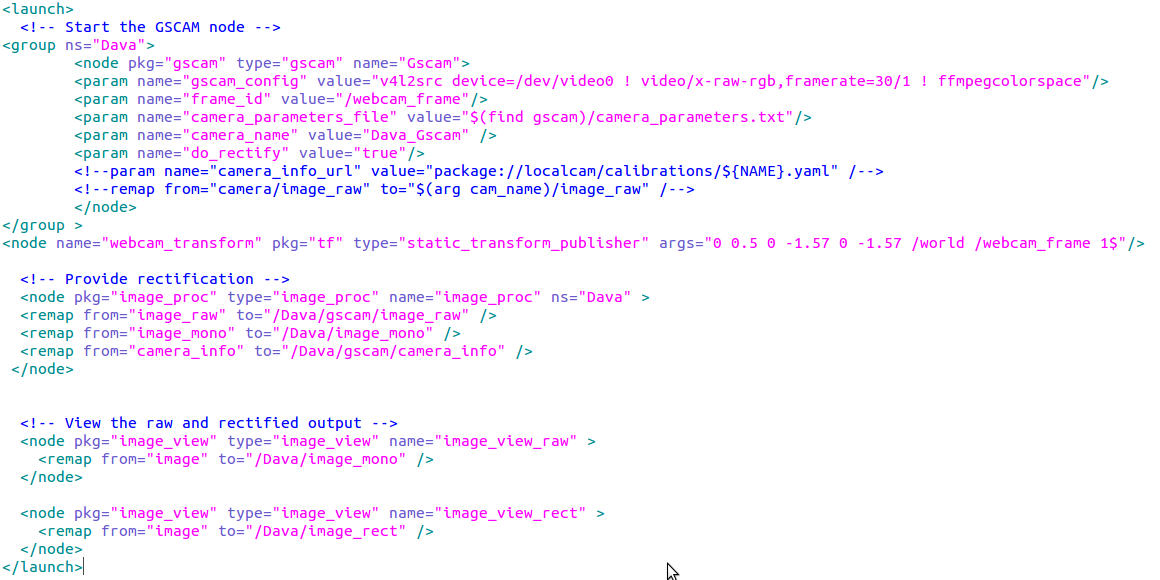
| 2013-09-28 14:27:14 -0500 | edited question | synchronized problem related to calibration Hello All. I Am a rookie in Ros, I am using ros fuerte and a monocular camera. My lapto's camera. I want to know how many things I need to setup to make a retification image with image_proc package. I already setup a launch file, I attached But when I ran the image_view to display the image rectify, I got nothing. And when I ran the image_view to display the image mono, it works. So I want to know what things I have to setup to do a rectification image. And what thing I did wrong. I attached the rxgraph output, my launch file and my camera parameters Besides I have a warning: [image_transport] Topics '/Dava/image_mono' and '/Dava/gscam/camera_info' do not appear to be synchronized. In the last 10s: Image messages received: 80 CameraInfo messages received: 80 Synchronized pairs: 0 I will appreciate any respond . Thank you
you can download the launch file to this link: https://mega.co.nz/#!fohxhQYY!RIuUOVuf1mL8Nn_erxkrujVt8zUmsLn-4_kP2YokMxc |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}