The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-06-07 15:00:03 -0500 | received badge | ● Nice Answer (source) |
| 2023-03-11 12:24:14 -0500 | received badge | ● Necromancer (source) |
| 2022-08-20 20:31:16 -0500 | answered a question | How to import 3D Model COLLADA (.dae) file to RVIZ Based on the visualization_msgs markers of RViz I wrote a small package that makes it easy to load meshes into RViz as t |
| 2022-08-20 20:30:02 -0500 | answered a question | Importing an STL file into Rviz Based on the visualization_msgs markers of RViz I wrote a small package that makes it easy to load meshes into RViz as t |
| 2022-08-20 20:28:58 -0500 | answered a question | how to display a mesh with texture in RViz? Based on the visualization_msgs markers of RViz I wrote a small package that makes it easy to load meshes into RViz as t |
| 2022-06-28 14:27:27 -0500 | received badge | ● Necromancer (source) |
| 2022-06-28 09:36:45 -0500 | received badge | ● Notable Question (source) |
| 2022-06-28 09:36:45 -0500 | received badge | ● Popular Question (source) |
| 2022-06-28 09:03:21 -0500 | answered a question | 4-wheel robot localization in global Generally 4-wheel-robot localization only based on the odometry will lead to big errors. Actually, you have two too many |
| 2022-06-28 08:46:52 -0500 | commented answer | Calculating inertial matrix for Gazebo I updated the repo regarding that. |
| 2022-06-28 05:55:32 -0500 | received badge | ● Teacher (source) |
| 2022-06-28 05:55:32 -0500 | received badge | ● Necromancer (source) |
| 2022-06-28 05:22:08 -0500 | answered a question | Is there any way to calculate inertial property of a robot to simulate it in Gazebo I implemented a python script reading an 3D file like stl or dae and outputting the full URDF XML inertial tag based on |
| 2022-06-28 05:22:00 -0500 | answered a question | Calculating inertial matrix for Gazebo I implemented a python script reading an 3D file like stl or dae and outputting the full URDF XML inertial tag based on |
| 2022-06-28 05:21:16 -0500 | edited answer | Building URDF from scratch, how to calculate inertial values? I implemented a python script reading an 3D file like stl or dae and outputting the full URDF XML inertial tag based on |
| 2022-06-28 05:21:07 -0500 | answered a question | Building URDF from scratch, how to calculate inertial values? I implemented a python script reading an 3D file like stl or dae and outputting the full URDF XML inertial tag based on |
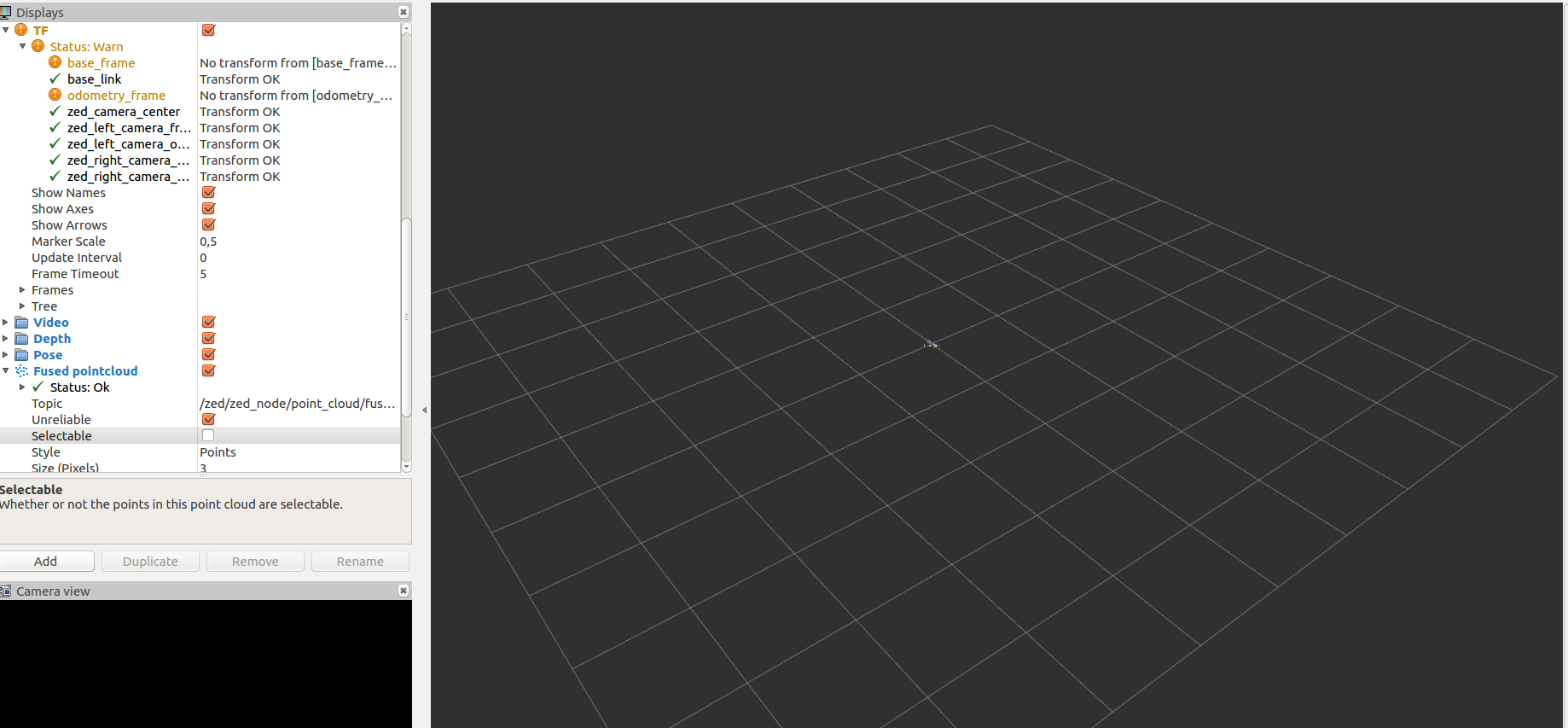
| 2022-06-13 03:14:00 -0500 | marked best answer | Mapping with Zed Camera Hi, i want to use our Stereolabs Zed Cam to get a map in Rviz. I set up zed-wrapper (and SDK and Cuda) successfully and startet the zed.launch file to get image data. The data is broadcasted to its topics and i can get it echoing the corresponding topics. Also in rqt the images can be shown. But if i open rviz i can't see anything. No image data, no pointcloud,...
I loaded the rviz config file from stereolabs and the first different point on my system is: I have no map frame. There are only the following frames availabe: base_frame, base_link, odometry_frame, zed_camera_center, zed_{left,right}_camera_{optical}_frame.
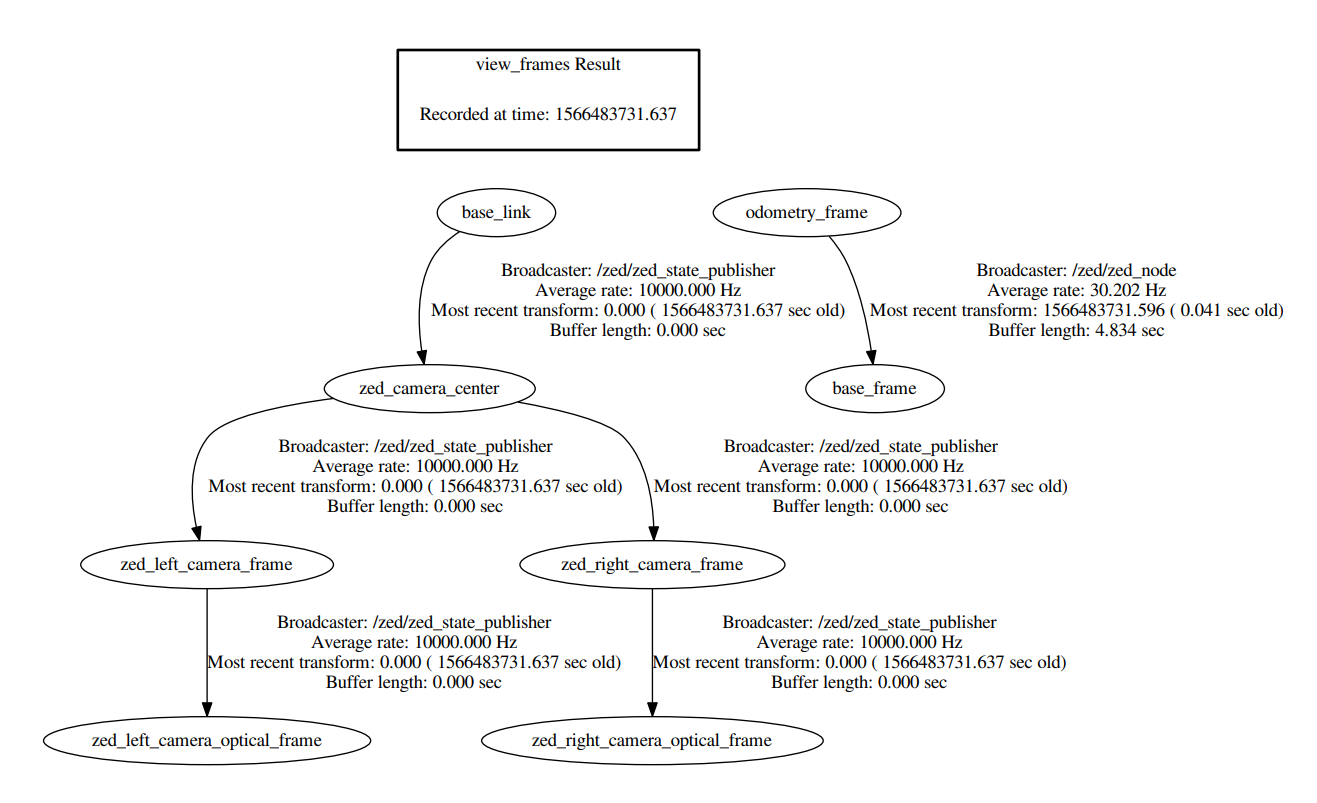
I found out it could be a problem with this tricky fixed frame and got the tf-tree attached below. There i can find two subtrees... Is this correct or is this my problem? With frame base_link chosen the rviz looks as in the image below. TF says "No transform from [base_frame] to frame [base_link]. I think this is a problem, but why and how to solve it? |
| 2022-04-21 14:29:13 -0500 | received badge | ● Famous Question (source) |
| 2021-08-18 09:58:04 -0500 | received badge | ● Famous Question (source) |
| 2021-06-08 17:03:25 -0500 | commented answer | Arduino rosserial - Unable to sync with device Yes, you can. But you can not send something with Serial.write() |
| 2021-06-04 16:23:21 -0500 | received badge | ● Notable Question (source) |
| 2021-06-03 02:31:43 -0500 | received badge | ● Popular Question (source) |
| 2021-05-31 05:29:14 -0500 | edited question | MoveIt - Planning with Orientation Constaint MoveIt - Planning with Orientation Constaint Hi I'm planning a path between two poses with an UR10 robotic arm. I would |
| 2021-05-31 05:25:36 -0500 | asked a question | MoveIt - Planning with Orientation Constaint MoveIt - Planning with Orientation Constaint Hi I'm planning a path between two poses with an UR10 robotic arm. I would |
| 2021-04-22 05:54:37 -0500 | received badge | ● Notable Question (source) |
| 2021-04-16 11:42:55 -0500 | received badge | ● Famous Question (source) |
| 2021-04-14 08:35:35 -0500 | commented question | Set two model states simultaneously Did you think about setting it programmatically like https://answers.gazebosim.org//question/22125/how-to-set-a-models-p |
| 2021-03-28 09:45:09 -0500 | received badge | ● Famous Question (source) |
| 2021-03-20 18:00:44 -0500 | received badge | ● Popular Question (source) |
| 2021-03-17 06:14:30 -0500 | answered a question | IKfast file for UR5 I recently created one for the UR10 but then recognized, that there is the ur_kinematics solver which is much more devel |
| 2021-03-16 17:50:26 -0500 | received badge | ● Organizer (source) |
| 2021-03-15 20:00:20 -0500 | commented question | MoveIt! Let robot move to pose with IKFast An other thing to ask. I see there is an ikfast.h file in the ur_kinematics package. Are the ur_kinematics simply an ikf |
| 2021-03-15 19:56:13 -0500 | commented question | NameError: name 'rclpy' is not defined Did you start your pycharm from a terminal? |
| 2021-03-15 09:58:31 -0500 | asked a question | MoveIt IKFast plugin for UR10 MoveIt IKFast plugin for UR10 Hihi, i try to let a UR10 robot move to a pose using the following python code. I simply g |
| 2021-03-15 09:57:07 -0500 | asked a question | MoveIt! Let robot move to pose with IKFast MoveIt! Let robot move to pose with IKFast Hihi, i try to let a UR10 robot move to a pose using the following python cod |
| 2021-03-15 04:47:39 -0500 | received badge | ● Famous Question (source) |
| 2021-02-28 07:42:39 -0500 | received badge | ● Notable Question (source) |
| 2021-02-23 08:21:59 -0500 | received badge | ● Popular Question (source) |
| 2021-02-22 06:57:52 -0500 | marked best answer | XACRO Macro Noetic not working Hi,
I'm facing issues with xacro macros in ROS noetic. I have the following robot description (or a simplified version) containing one xacro macro. After the definition of the macro it is called by Normally i have this macro defined in an other file and include it in a main xacro file, where i include a lot of macros and then build up the robot using those macros. If i load the robot description in Gazebo, i get the error message If i remove the two xacro macro lines around the links and joint (and the call of the macro), its working as expected. I am pretty sure, i used the xacro description like it is in Kinetic and Melodic before and had no problems with it. I also think the macro looks like the example on http://wiki.ros.org/urdf/Tutorials/Us... Can you see any issue with it or is there any change in xacro macros in noetic? |
| 2021-02-22 05:14:16 -0500 | asked a question | XACRO Macro Noetic not working XACRO Macro Noetic not working Hi, I'm facing issues with xacro macros in ROS noetic. I have the following robot descri |
| 2021-02-19 09:21:22 -0500 | answered a question | Connection of robot and computer XMLRPCLIB Error If i remeber correctly, the problem was that both machines did work with other ROS versions. |
| 2020-09-12 11:40:28 -0500 | received badge | ● Famous Question (source) |
| 2020-09-12 07:54:28 -0500 | commented question | Unable to open a .world file Are you sure, your world is properly fromatted? |
| 2020-09-12 07:52:47 -0500 | commented question | "Add directory" error after catkin build Where did you catkin build? |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.