The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2019-10-30 05:36:31 -0500 | received badge | ● Famous Question (source) |
| 2018-11-17 08:49:05 -0500 | received badge | ● Notable Question (source) |
| 2018-11-17 08:49:05 -0500 | received badge | ● Popular Question (source) |
| 2018-05-10 02:01:43 -0500 | commented question | MoveItCommanderException: Error setting joint target. Is IK running? @gvdhoorn Could you give me some advice? |
| 2018-05-10 01:45:36 -0500 | commented question | Pick using ABB IRB 4600 My email ID is [zhouende1991@163.com], I used moveit setup assist just can produce a srdf file, but not urdf, maybe I ne |
| 2018-05-09 21:30:55 -0500 | edited question | MoveItCommanderException: Error setting joint target. Is IK running? MoveItCommanderException: Error setting joint target. Is IK running? Hi, all. Now I want to control my abb industrial ro |
| 2018-05-09 21:16:07 -0500 | edited question | MoveItCommanderException: Error setting joint target. Is IK running? MoveItCommanderException: Error setting joint target. Is IK running? Hi, all. Now I want to control my abb industrial ro |
| 2018-05-09 21:13:22 -0500 | asked a question | MoveItCommanderException: Error setting joint target. Is IK running? MoveItCommanderException: Error setting joint target. Is IK running? Hi, all. Now I want to control my abb industrial ro |
| 2018-05-08 06:00:00 -0500 | received badge | ● Famous Question (source) |
| 2018-04-28 01:50:58 -0500 | received badge | ● Enthusiast |
| 2018-04-27 03:51:44 -0500 | commented answer | cannot import moveit_commander Has this bug been fixed? I still cannot import moveit_commander on Ubuntu 16.04 and pyassimp 3.2 I have seen ros-plannin |
| 2018-04-27 03:51:24 -0500 | commented answer | cannot import moveit_commander Has this bug been fixed? I still cannot import moveit_commander on Ubuntu 16.04 and pyassimp 3.2 I have seen ros-plannin |
| 2018-04-27 03:41:38 -0500 | commented answer | cannot import moveit_commander Has this bug been fixed? I still cannot import moveit_commander on Ubuntu 16.04 and pyassimp 3.2 I have seen ros-plannin |
| 2018-04-25 05:57:14 -0500 | commented answer | "URDF/COLLADA file is not a valid robot model" when loading IRB4600 in MoveIt Setup Assistant Thanks, I'm just a novice on Ubuntu and ROS, and I even never know Github and this community before two weeks ago. So I |
| 2018-04-25 05:44:59 -0500 | commented answer | "URDF/COLLADA file is not a valid robot model" when loading IRB4600 in MoveIt Setup Assistant BTW, how could I upload the abb_irb4600_moveit_config files pkg to the ros-industrial/abb_experimental repo since Upload |
| 2018-04-25 05:44:59 -0500 | received badge | ● Commentator |
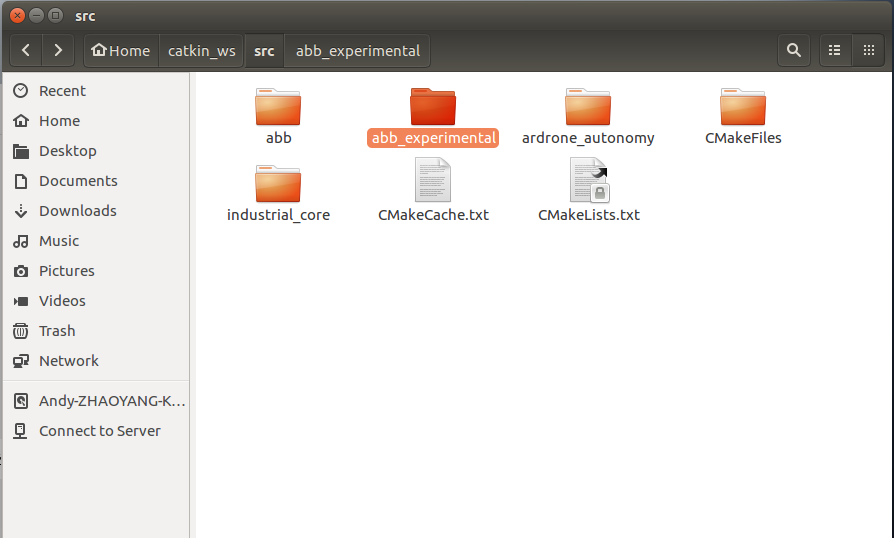
| 2018-04-24 12:26:25 -0500 | marked best answer | "URDF/COLLADA file is not a valid robot model" when loading IRB4600 in MoveIt Setup Assistant I found that all the support pkg under and I checked the difference between the two big pkgs and then found that the So I copy the 4600 pkg into the BTW, I need the Edit: Here are my handle details
|
| 2018-04-24 12:26:25 -0500 | received badge | ● Scholar (source) |
| 2018-04-24 11:50:57 -0500 | commented answer | "URDF/COLLADA file is not a valid robot model" when loading IRB4600 in MoveIt Setup Assistant By following your suggestion, I make it finally. Thank you sooooo much~ |
| 2018-04-24 11:48:44 -0500 | received badge | ● Supporter (source) |
| 2018-04-24 11:27:42 -0500 | received badge | ● Notable Question (source) |
| 2018-04-24 11:04:40 -0500 | edited question | "URDF/COLLADA file is not a valid robot model" when loading IRB4600 in MoveIt Setup Assistant "URDF/COLLADA file is not a valid robot model" when loading IRB4600 in MoveIt Setup Assistant I found that all the suppo |
| 2018-04-24 11:04:40 -0500 | received badge | ● Editor (source) |
| 2018-04-24 11:01:53 -0500 | commented answer | "URDF/COLLADA file is not a valid robot model" when loading IRB4600 in MoveIt Setup Assistant please see the pictures in the attachments |
| 2018-04-24 10:59:25 -0500 | edited question | "URDF/COLLADA file is not a valid robot model" when loading IRB4600 in MoveIt Setup Assistant "URDF/COLLADA file is not a valid robot model" when loading IRB4600 in MoveIt Setup Assistant I found that all the suppo |
| 2018-04-24 10:51:11 -0500 | commented answer | "URDF/COLLADA file is not a valid robot model" when loading IRB4600 in MoveIt Setup Assistant andy@andy-zhaoyang-k42-80:~/catkin_ws/src$ dpkg -l | grep xacro ii ros-kinetic-xacro |
| 2018-04-24 10:48:10 -0500 | answered a question | "URDF/COLLADA file is not a valid robot model" when loading IRB4600 in MoveIt Setup Assistant Here are my handle details andy@andy-zhaoyang-k42-80:~/catkin_ws$ rosdep install --from-paths src --ignore-src --ro |
| 2018-04-24 10:32:29 -0500 | commented answer | "URDF/COLLADA file is not a valid robot model" when loading IRB4600 in MoveIt Setup Assistant yes. I can't open the all the xacro files under abb_experimental but can open all the xacro files under abb pkg |
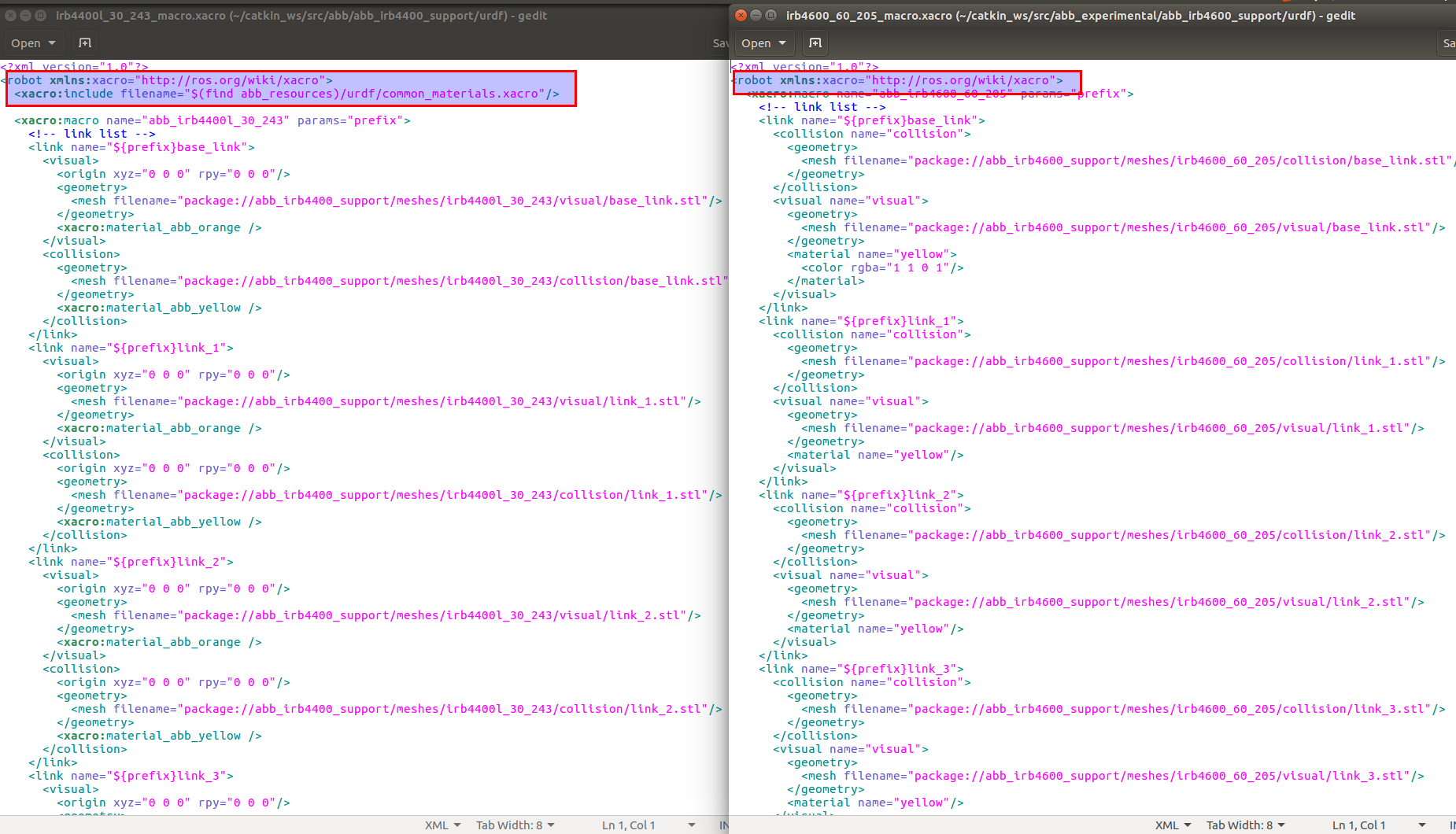
| 2018-04-24 10:29:33 -0500 | commented answer | "URDF/COLLADA file is not a valid robot model" when loading IRB4600 in MoveIt Setup Assistant Besides, the xacro file of irb_4600 doesn't rely on abb_resources while irb_4400 does, maybe it is not a matter of missi |
| 2018-04-24 10:24:44 -0500 | commented answer | "URDF/COLLADA file is not a valid robot model" when loading IRB4600 in MoveIt Setup Assistant I have checked the process of installation by referring the wiki.ros.org/abb_experimental and without any errors. But I |
| 2018-04-24 10:15:48 -0500 | received badge | ● Popular Question (source) |
| 2018-04-24 04:21:28 -0500 | commented question | Pick using ABB IRB 4600 OK, I have opened a new issue just now, could you give some suggestions? |
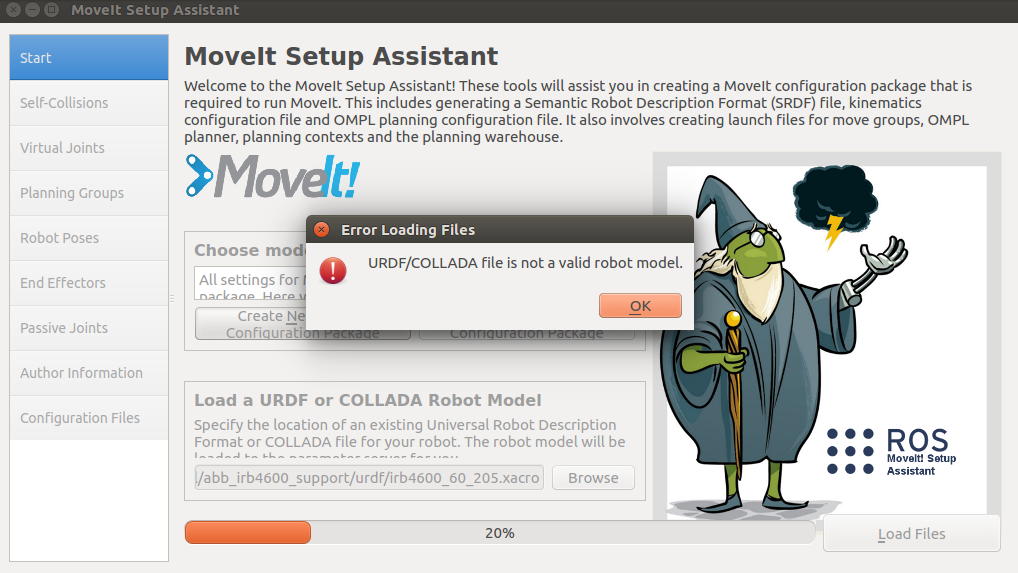
| 2018-04-24 04:19:54 -0500 | asked a question | "URDF/COLLADA file is not a valid robot model" when loading IRB4600 in MoveIt Setup Assistant abb_irb4600_60_205.xacro cannot be open in MoveIt Setup Assistant with the notice "URDF/COLLADA file is not a valid robo |
| 2018-04-24 02:17:45 -0500 | commented question | Pick using ABB IRB 4600 I knew there was already a support pkg for the IRB 4600 in http://wiki.ros.org/abb_experimental, but the .xacro file can |
| 2018-04-24 02:17:11 -0500 | answered a question | Pick using ABB IRB 4600 I knew there was already a support pkg for the IRB 4600 in http://wiki.ros.org/abb_experimental, but the .xacro file can |
| 2018-04-23 10:55:31 -0500 | answered a question | Pick using ABB IRB 4600 Hi, could you share your urdf file or moveit_config file of abb_irb4600 with me? It will really help me and save me a lo |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.