The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-04-18 01:50:46 -0500 | received badge | ● Notable Question (source) |
| 2022-04-18 01:50:46 -0500 | received badge | ● Famous Question (source) |
| 2021-04-27 09:39:21 -0500 | marked best answer | rostopic no longer work I am working with ubuntu 14.04 indigo. I was downloading a python program and installed a few dependences like , I tried source the setup files below but rostopic still woudn't work. Following is my env values: I tried to export the following env values, and ran it again but rostopic still didn't work. Also, when I hit double tab on From the above list, it seems like my roslaunch is missing as well. Did downloading those 3 packages break my ros environment? What can I do to fix it? |
| 2020-10-23 06:53:54 -0500 | received badge | ● Famous Question (source) |
| 2020-08-06 17:02:52 -0500 | received badge | ● Famous Question (source) |
| 2020-06-01 03:57:12 -0500 | received badge | ● Famous Question (source) |
| 2020-01-04 16:35:05 -0500 | received badge | ● Famous Question (source) |
| 2019-12-10 06:03:17 -0500 | received badge | ● Notable Question (source) |
| 2019-12-10 06:03:17 -0500 | received badge | ● Popular Question (source) |
| 2019-07-30 20:53:40 -0500 | received badge | ● Student (source) |
| 2019-07-30 20:53:34 -0500 | received badge | ● Notable Question (source) |
| 2019-05-08 02:48:50 -0500 | received badge | ● Notable Question (source) |
| 2019-03-06 07:23:25 -0500 | received badge | ● Famous Question (source) |
| 2019-01-16 09:51:50 -0500 | received badge | ● Famous Question (source) |
| 2019-01-10 06:14:17 -0500 | received badge | ● Famous Question (source) |
| 2018-12-18 23:12:28 -0500 | received badge | ● Popular Question (source) |
| 2018-12-18 23:06:27 -0500 | received badge | ● Famous Question (source) |
| 2018-12-14 12:06:52 -0500 | received badge | ● Popular Question (source) |
| 2018-12-14 12:06:52 -0500 | received badge | ● Notable Question (source) |
| 2018-12-14 12:06:52 -0500 | received badge | ● Famous Question (source) |
| 2018-12-11 15:18:49 -0500 | received badge | ● Notable Question (source) |
| 2018-10-19 09:57:20 -0500 | received badge | ● Notable Question (source) |
| 2018-10-19 09:57:20 -0500 | received badge | ● Famous Question (source) |
| 2018-10-17 16:12:52 -0500 | received badge | ● Notable Question (source) |
| 2018-10-14 21:38:23 -0500 | commented answer | Where is magnetometer measurements in the IMU messages thank you for you folks' answer! |
| 2018-10-14 21:37:49 -0500 | marked best answer | Where is magnetometer measurements in the IMU messages I am using ros indigo, working with a MIDG II GPS/INS sensor using this python wrapper, I am able to produce a IMU message, but where is the magnetometer data? How would I get magnetometer data if I need it? |
| 2018-10-13 15:32:09 -0500 | received badge | ● Popular Question (source) |
| 2018-10-12 20:52:58 -0500 | commented answer | Where is magnetometer measurements in the IMU messages yeah, it's changing slightly, I am wondering why the magnetometer me measurement is giving in quarteron instead of just |
| 2018-10-12 18:47:28 -0500 | asked a question | Where is magnetometer measurements in the IMU messages Where is magnetometer measurements in the IMU messages I am using ros indigo, working with a MIDG II GPS/INS sensor usin |
| 2018-10-03 21:16:58 -0500 | received badge | ● Notable Question (source) |
| 2018-09-20 22:52:57 -0500 | received badge | ● Famous Question (source) |
| 2018-09-11 05:34:46 -0500 | received badge | ● Famous Question (source) |
| 2018-09-05 18:16:33 -0500 | edited question | midg II gps no fix status midg II gps no fix status I am using indigo and trying to get the midg II ins-gps to work with the husky robot. I found |
| 2018-09-05 18:06:43 -0500 | edited question | midg II gps no fix status midg II gps no fix status I am using indigo and trying to get the midg II ins-gps to work with the husky robot. I found |
| 2018-09-05 18:04:37 -0500 | asked a question | midg II gps no fix status midg II gps no fix status I am using indigo and trying to get the midg II ins-gps to work with the husky robot. I found |
| 2018-09-03 04:12:48 -0500 | commented answer | how to get wheel encoder data on HuskyA200 Thank you for the reply. I want to use raw wheel encoders's tick signal like in this post to calculate the odometry. So |
| 2018-09-02 13:58:27 -0500 | received badge | ● Popular Question (source) |
| 2018-09-01 16:38:27 -0500 | commented answer | how to get wheel encoder data on HuskyA200 Thank you for the reply. I want to use raw wheel encoders's tick signal like in this post to calculate the odometry. So |
| 2018-08-31 23:37:47 -0500 | asked a question | how to get wheel encoder data on HuskyA200 how to get wheel encoder data on HuskyA200 I am working with Indigo Husky A200, and I want to try to implement the odome |
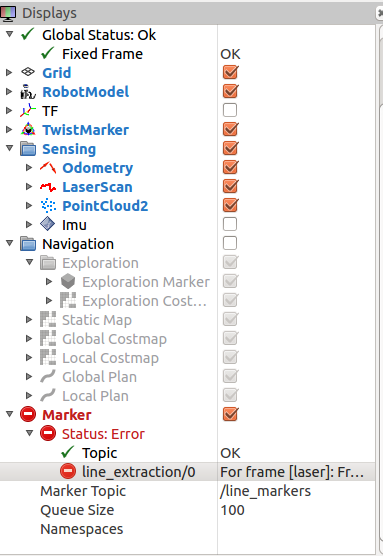
| 2018-08-07 21:38:19 -0500 | marked best answer | For frame [laser]: Frame [laser] does not exist I am running ubuntu 14.4 indigo. I downloaded this line extraction packet..
I then anyone have suggestions on this? thank you. |
| 2018-08-07 21:38:19 -0500 | commented answer | For frame [laser]: Frame [laser] does not exist thank you! |
| 2018-08-07 20:57:24 -0500 | asked a question | For frame [laser]: Frame [laser] does not exist For frame [laser]: Frame [laser] does not exist I am running ubuntu 14.4 indigo. I downloaded this line extraction packe |
| 2018-08-03 16:35:02 -0500 | edited question | EKF localization with unknown correspondence EKF localization with unknown correspondence I am working on a simulation with the huskyA200. I want to implement the EK |
| 2018-08-03 16:34:30 -0500 | edited question | EKF localization with unknown correspondence EKF localization with unknown correspondence I am working on a simulation with the huskyA200. I want to implement the EK |
| 2018-08-02 14:01:29 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.