The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-08-04 05:04:50 -0500 | marked best answer | range_sensor_layer::RangeSensorLayer does not exit Hi, I'm using ROS Kinetic and I'm currently trying to set up the navigation package. I've got a hexapod with a lidar on top and navigation is working fine for this configuration. But recently I added an ultrasonic sensor to the front to avoid bumping into glas doors and unfortunately I can't get the range_sensor_layer to run. This is my costmap_common_params.yaml: My local_costmap_params.yaml: And my global_costmap_params.yaml: When I try to launch navigation I get this error, which leads to the process move_base dying:
I tried to put the plugins-tag into local_costmap_params.yaml already which lets navigation get launched but it will ignore the range-message for obstacle detection. The topic \us\range is not subscribed by any other node in this configuration. Is there anything I did wrong with including the range_sensor_layer-plugin for navigation? |
| 2021-10-21 09:42:41 -0500 | received badge | ● Notable Question (source) |
| 2021-09-14 00:44:50 -0500 | received badge | ● Enlightened (source) |
| 2021-09-14 00:44:50 -0500 | received badge | ● Good Answer (source) |
| 2021-06-10 07:14:28 -0500 | received badge | ● Nice Answer (source) |
| 2021-05-04 09:10:39 -0500 | received badge | ● Popular Question (source) |
| 2021-04-22 14:43:45 -0500 | asked a question | Reworked Velodyne driver causes OctoMap segmentation fault Reworked Velodyne driver causes OctoMap segmentation fault Hey, I am running Ubuntu 18 with ROS Melodic and with the Vel |
| 2021-03-25 03:27:37 -0500 | edited answer | Global planner makes robot drive in circles along U shaped path Edit: I recently stumbled upon this answer and tried it myself. Reducing the rolling window size to around twice/thrice |
| 2021-03-25 03:19:00 -0500 | edited answer | Global planner makes robot drive in circles along U shaped path Edit: I recently stumbled upon this answer and tried it myself. Reducing the rolling window size to around twice the siz |
| 2021-02-25 03:26:57 -0500 | received badge | ● Student (source) |
| 2021-01-23 23:13:53 -0500 | received badge | ● Famous Question (source) |
| 2020-11-25 00:44:27 -0500 | marked best answer | Prerelease melodic Qt5 cmake error Hey, I am currently trying to do my prerelease tests for a melodic version of my meta-package robot_statemachine which was already released for kinetic. Unfortunately, when running the prerelease tests for melodic, I encountered various errors related to Qt5 dependencies. The meta-package includes two packages which are basically plugins, one for rqt and the other for rviz. Unfortunately, when running the prerelease script on docker, both fail with the below errors: rsm_rviz_plugins error: rsm_rqt_plugins error: After some research I found this question. Following the answer I added a build dependency for Therefore, my question: Could someone point me out how to correctly include the Qt5 dependencies for rviz and rqt plugins in ROS melodic? Below you can see my CMakeLists and package files for the two packages throwing errors. rsm_rqt_plugins: CMakeLists.txt: |
| 2020-11-25 00:44:21 -0500 | answered a question | Prerelease melodic Qt5 cmake error Seems like I was testing with a detached git head or something when trying to add <build_depend>qtbase5-dev</bu |
| 2020-11-25 00:38:33 -0500 | received badge | ● Notable Question (source) |
| 2020-11-20 01:41:19 -0500 | received badge | ● Popular Question (source) |
| 2020-11-19 04:58:19 -0500 | asked a question | Prerelease melodic Qt5 cmake error Prerelease melodic Qt5 cmake error Hey, I am currently trying to do my prerelease tests for a melodic version of my meta |
| 2020-08-31 03:34:28 -0500 | received badge | ● Famous Question (source) |
| 2020-08-20 07:50:25 -0500 | received badge | ● Self-Learner (source) |
| 2020-08-20 06:19:40 -0500 | commented question | Global planner makes robot drive in circles along U shaped path Sorry for the late response, I was busy with some other more important work. I think, I've found a solution which I post |
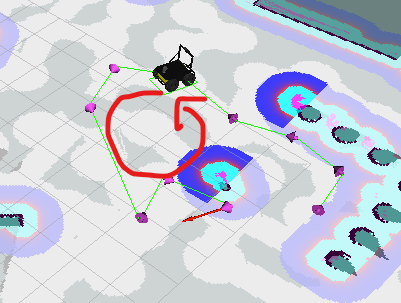
| 2020-08-20 06:18:18 -0500 | marked best answer | Global planner makes robot drive in circles along U shaped path Hey, An example path calculated by the global planner can be seen in the image below (green lines show the path, purple arrows the orientation along the path's nodes, the red arrow marks the goal node and the hand-drawn red arrow shows where the robot is moving in a circular pattern. In this example the robot started from the first node on the right and then got stuck in the circle for quite some repititions until it finally (somehow) manages to reach the goal.
Now my question: Is the global planner giving out paths which nodes are too far apart or might there be a problem with the orientation of said nodes? Right now all nodes along the path point towards the next node, the goal node points towards the exploration goal. Or is the actual problem the configuration of my local planner (DWA, parameters shown below)? I've played around with some of its parameters (path_distance_bias and goal_distance_bias) but this did not seem to stop the robot from driving in circles. Thanks in advance, Edit 2: Since I'm working on a VM and I had my issues recording the screen via video, I made a gif which you can see below. The robot is moving in circles again in another example. Or to be precise, it looks more like an outward spiral. This time you can see the tree structure (blue lines and spheres). The glboal path can still be identified by the purple arrows at the path's nodes (green line is hardly visible).
Edit 3: I've changed 3 parameters and messed around with them for a bit. I think oscillation_reset_dist has no impact on this matter since the robot's behavior did not change on altering the parameter. the parameters path_distance_bias and goal_distance_bias actually led to a different behavior. The higher path_distance_bias was compared to goal_distance_bias the closer the robot followed the path up to the goal. When nearly reaching it, he made a sharp turn for the start as can be seen in the gif below ( with path_distance_bias: 50, goal_distance_bias: 10). The other way around leads to the robot just going from the start straight to the goal and turning around when nearly there.
It seems like the path is calculated anew when nearly there but I added console output to the methods and can verify ... (more) |
| 2020-08-20 06:18:13 -0500 | answered a question | Global planner makes robot drive in circles along U shaped path So, it seems I somehow fixed the problem (at least I wasn't able to observe the described behavior for a longer simulati |
| 2020-08-04 06:55:04 -0500 | commented question | Global planner makes robot drive in circles along U shaped path This seems to confirm your point. If the goal is inside the local costmap, the complete path is shown. With path_distan |
| 2020-07-31 14:47:35 -0500 | received badge | ● Notable Question (source) |
| 2020-07-31 01:13:50 -0500 | edited question | Global planner makes robot drive in circles along U shaped path Global planner makes robot drive in circles along U shaped path Hey, I am using ROS kinetic and followed the navigation |
| 2020-07-31 01:12:02 -0500 | commented question | Global planner makes robot drive in circles along U shaped path @Dragonslayer: Unfortunately, I already tried the prune_plan parameter to no avail. When I set it to false, it seems to |
| 2020-07-31 01:12:02 -0500 | received badge | ● Commentator |
| 2020-07-30 07:55:26 -0500 | edited question | Global planner makes robot drive in circles along U shaped path Global planner makes robot drive in circles along U shaped path Hey, I am using ROS kinetic and followed the navigation |
| 2020-07-30 02:42:55 -0500 | edited question | Global planner makes robot drive in circles along U shaped path Global planner makes robot drive in circles along U shaped path Hey, I am using ROS kinetic and followed the navigation |
| 2020-07-30 02:38:08 -0500 | received badge | ● Popular Question (source) |
| 2020-07-30 01:38:23 -0500 | edited question | Global planner makes robot drive in circles along U shaped path Global planner makes robot drive in circles along U shaped path Hey, I am using ROS kinetic and followed the navigation |
| 2020-07-30 00:58:17 -0500 | commented question | Global planner makes robot drive in circles along U shaped path @Dragonslayer: I've added a gif, since I haven't found a program able to record the screen without artifacts on my VM. A |
| 2020-07-30 00:49:57 -0500 | edited question | Global planner makes robot drive in circles along U shaped path Global planner makes robot drive in circles along U shaped path Hey, I am using ROS kinetic and followed the navigation |
| 2020-07-30 00:26:56 -0500 | edited question | Global planner makes robot drive in circles along U shaped path Global planner makes robot drive in circles along U shaped path Hey, I am using ROS kinetic and followed the navigation |
| 2020-07-29 10:27:23 -0500 | edited question | Global planner makes robot drive in circles along U shaped path Global planner makes robot drive in circles along U shaped path Hey, I am using ROS kinetic and followed the navigation |
| 2020-07-29 10:27:23 -0500 | received badge | ● Editor (source) |
| 2020-07-29 10:26:42 -0500 | asked a question | Global planner makes robot drive in circles along U shaped path Global planner makes robot drive in circles along U shaped path Hey, I am using ROS kinetic and followed the navigation |
| 2020-01-06 08:38:17 -0500 | received badge | ● Famous Question (source) |
| 2019-10-02 03:23:12 -0500 | received badge | ● Notable Question (source) |
| 2019-08-05 04:31:59 -0500 | received badge | ● Popular Question (source) |
| 2019-08-03 07:24:09 -0500 | marked best answer | Running a prerelease test fails with Python ImportError Hey everyone, I am currently trying on publishing a ROS package and following the Realeasing A Package guide. So far I've added my package name to the rosdistro for kinetic and verified its readiness before. Unfortunately, I can't manage to execute a prerelease test. I get stuck at the 4th step of section 5.2. When I run the generated command (which is shown below), I get the following error: The command: The error output: So far, I've tried with the first suggestion under 5.1, installing the prerelease.sh output with python-ros-buildfarm: |
| 2019-08-03 07:24:08 -0500 | commented answer | Running a prerelease test fails with Python ImportError Thanks again for clarifying and helping me out so much! I never used virtualenv before, so wasn't quite sure what I was |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.