The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-10-28 17:55:44 -0500 | received badge | ● Nice Question (source) |
| 2018-12-19 06:29:22 -0500 | received badge | ● Famous Question (source) |
| 2018-12-19 06:29:22 -0500 | received badge | ● Notable Question (source) |
| 2018-06-25 08:31:03 -0500 | received badge | ● Famous Question (source) |
| 2018-06-11 15:49:05 -0500 | received badge | ● Famous Question (source) |
| 2018-05-03 16:20:34 -0500 | commented question | Unable to plan IK using MoveIt! Nope. You could try adding a dummy joint to make it a 6DOF manipulator and then try solving IK using KDL plugin. |
| 2018-05-02 08:22:37 -0500 | received badge | ● Notable Question (source) |
| 2018-04-26 09:41:05 -0500 | received badge | ● Student (source) |
| 2018-04-25 02:26:53 -0500 | received badge | ● Popular Question (source) |
| 2018-04-24 15:52:23 -0500 | edited question | Unable to plan IK using MoveIt! Unable to plan IK using MoveIt! I'm using the LMA kinematics plugin to plan motion for a 6DOF arm. I'm able to use the i |
| 2018-04-24 15:39:26 -0500 | asked a question | Unable to plan IK using MoveIt! Unable to plan IK using MoveIt! I'm using the LMA kinematics plugin to plan motion for a 6DOF arm. I'm able to use the i |
| 2018-04-22 08:40:55 -0500 | received badge | ● Enthusiast |
| 2018-04-20 12:37:25 -0500 | commented answer | What is the correct way to introduce a dummy link in URDF? Thanks a lot. This is very helpful. |
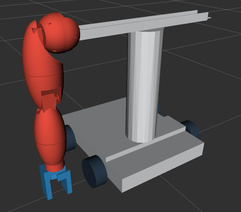
| 2018-04-20 12:37:02 -0500 | marked best answer | What is the correct way to introduce a dummy link in URDF? I am trying to simulate my mobile robot with a 5DOF arm. I came across the IKFast tutorial which mentions that I need a dummy link in my URDF. However, I am confused as to how to introduce this dummy link in my URDF. Some examples use a fixed joint between the world link and the robot chassis. If I create a dummy link and and a fixed joint to my robot chassis, will it be mobile? Should I use a planar joint? Here, base_link is my chassis (gray colored in the image below). Here is IKFast tutorial which I am referring to. Also I get a similar error while using KDL as mentioned in this unsolved post.
Is this the right way to do it? Are my dummy joint parameters right? My current URDF file without dummy links here. |
| 2018-04-20 12:37:02 -0500 | received badge | ● Scholar (source) |
| 2018-04-20 10:24:26 -0500 | received badge | ● Popular Question (source) |
| 2018-04-20 01:48:31 -0500 | received badge | ● Notable Question (source) |
| 2018-04-19 11:13:25 -0500 | received badge | ● Popular Question (source) |
| 2018-04-19 11:09:17 -0500 | edited question | What is the correct way to introduce a dummy link in URDF? What is the correct way to introduce a dummy link in URDF? I am trying to simulate my mobile robot with a 5DOF arm. I ca |
| 2018-04-19 10:55:36 -0500 | commented question | What is the correct way to introduce a dummy link in URDF? Updated the post with links. |
| 2018-04-19 10:55:09 -0500 | edited question | What is the correct way to introduce a dummy link in URDF? What is the correct way to introduce a dummy link in URDF? I am trying to simulate my mobile robot with a 5DOF arm. I ca |
| 2018-04-18 10:19:03 -0500 | edited question | What is the correct way to introduce a dummy link in URDF? What is the correct way to introduce a dummy link in URDF? I am trying to simulate my mobile robot with a 5DOF arm. I ca |
| 2018-04-18 10:18:46 -0500 | edited question | What is the correct way to introduce a dummy link in URDF? What is the correct way to introduce a dummy link in URDF? I am trying to simulate my mobile robot with a 5DOF arm. I ca |
| 2018-04-18 10:17:49 -0500 | asked a question | What is the correct way to introduce a dummy link in URDF? What is the correct way to introduce a dummy link in URDF? I am trying to simulate my mobile robot with a 5DOF arm. I ca |
| 2018-03-26 08:58:42 -0500 | commented question | SW2URDF Preview and Export is taking too long to open ThanksI Yeah that was the issue. The window is opening now. However the joint detection is incorrect. Revolute joints ar |
| 2018-03-26 01:22:39 -0500 | edited question | SW2URDF Preview and Export is taking too long to open SW2URDF Preview and Export is taking too long to open Solidworks 2017 Using the latest URDF exporter plugin When I clic |
| 2018-03-26 01:22:39 -0500 | received badge | ● Editor (source) |
| 2018-03-26 01:22:31 -0500 | edited question | SW2URDF Preview and Export is taking too long to open SW2URDF Preview and Export is taking too long to open Solidworks 2017 Using the latest URDF exporter plugin When I clic |
| 2018-03-26 01:21:37 -0500 | asked a question | SW2URDF Preview and Export is taking too long to open SW2URDF Preview and Export is taking too long to open Solidworks 2017 Using the latest URDF exporter plugin When I clic |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.