The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-11-07 23:56:40 -0500 | received badge | ● Famous Question (source) |
| 2022-11-07 23:56:40 -0500 | received badge | ● Notable Question (source) |
| 2020-04-24 04:59:20 -0500 | received badge | ● Famous Question (source) |
| 2020-04-24 04:59:20 -0500 | received badge | ● Notable Question (source) |
| 2020-04-24 04:59:20 -0500 | received badge | ● Popular Question (source) |
| 2020-03-04 17:34:12 -0500 | received badge | ● Notable Question (source) |
| 2019-05-20 01:17:21 -0500 | marked best answer | velodyne(HDL-32E) something shadow occured why it happened? https://www.youtube.com/watch?v=HdJar... our velodyne use driver -> https://github.com/ros-drivers/velodyne and i dont know why shadow occured what should i do? |
| 2019-03-01 16:34:20 -0500 | marked best answer | any install method of jsk_visualization/jsk_rviz_plugs? i want to use box boundering (jsk_pkg) but something error occured first error like this then i upload what should i do? anyone who know install method? |
| 2019-03-01 16:33:03 -0500 | received badge | ● Famous Question (source) |
| 2019-03-01 16:33:03 -0500 | received badge | ● Notable Question (source) |
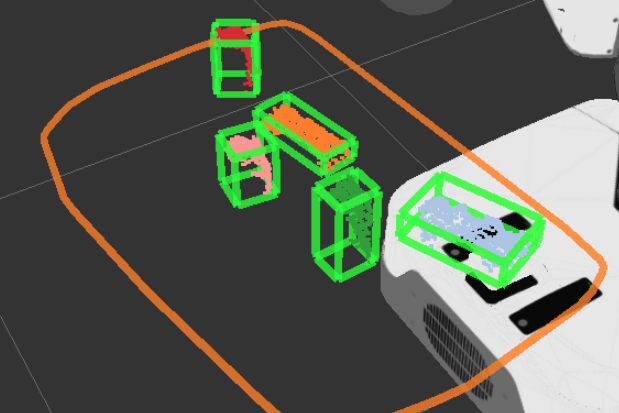
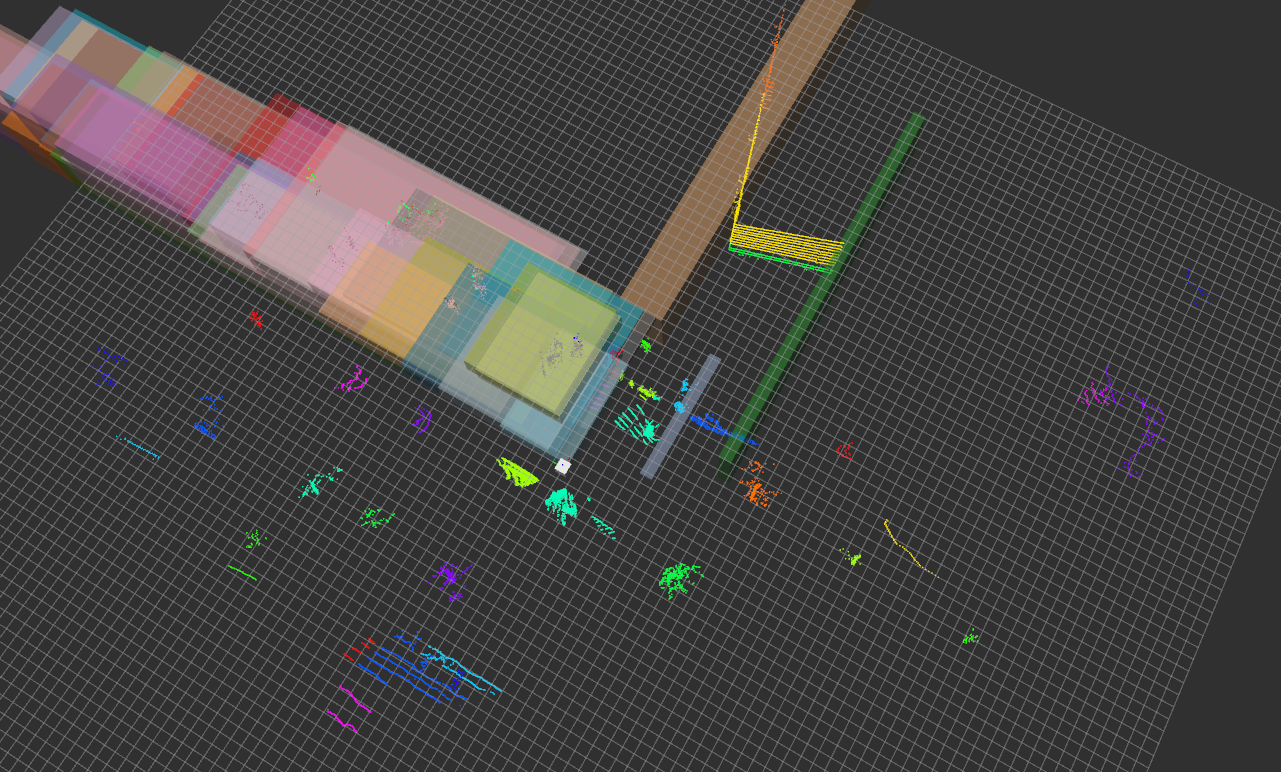
| 2019-03-01 16:31:16 -0500 | marked best answer | [solved]jsk_boundingBOXARRAY can't publish my source code is this i want to show up box with object
ex) i know min_x,y,z , max_x,y,z so i have 8 points of bound box how i can bounding object with jsk msg?
i can publish some image but doesnt match size and position
|
| 2019-03-01 16:30:18 -0500 | received badge | ● Famous Question (source) |
| 2019-01-31 19:48:15 -0500 | received badge | ● Notable Question (source) |
| 2019-01-31 13:35:36 -0500 | received badge | ● Popular Question (source) |
| 2018-10-17 13:53:12 -0500 | received badge | ● Popular Question (source) |
| 2018-10-17 09:00:53 -0500 | commented question | how to connect two velodyne with pci-express lancard cuz traffic too much in modem lidar and camera motion computer a lot conneted so date receive is too slow so i chnaged |
| 2018-10-17 04:40:07 -0500 | asked a question | how to connect two velodyne with pci-express lancard how to connect two velodyne with pci-express lancard velodyne 1 connected with pci-express 1 and velodyne 2 connected wi |
| 2018-09-28 05:58:22 -0500 | received badge | ● Famous Question (source) |
| 2018-09-28 05:58:22 -0500 | received badge | ● Notable Question (source) |
| 2018-09-17 04:41:43 -0500 | received badge | ● Popular Question (source) |
| 2018-09-14 06:07:05 -0500 | asked a question | ROS can Catch two velodyne Callbackfunction delay? ROS can Catch two velodyne Callbackfunction delay? I use two velodyne lidar. I use the left velodyne and the right velod |
| 2018-09-11 08:47:51 -0500 | received badge | ● Notable Question (source) |
| 2018-08-25 02:01:54 -0500 | received badge | ● Taxonomist |
| 2018-08-22 19:31:44 -0500 | received badge | ● Popular Question (source) |
| 2018-08-22 19:31:14 -0500 | received badge | ● Famous Question (source) |
| 2018-08-22 08:14:02 -0500 | edited question | [solved]jsk_boundingBOXARRAY can't publish jsk_boundingBOXARRAY can't publish my source code is this #include <ros/ros.h> #include <tf/transform_broadcas |
| 2018-08-22 08:14:02 -0500 | received badge | ● Editor (source) |
| 2018-08-22 08:13:43 -0500 | received badge | ● Popular Question (source) |
| 2018-08-22 08:13:35 -0500 | edited question | [solved]jsk_boundingBOXARRAY can't publish jsk_boundingBOXARRAY can't publish my source code is this #include <ros/ros.h> #include <tf/transform_broadcas |
| 2018-08-22 08:13:05 -0500 | commented answer | [solved]jsk_boundingBOXARRAY can't publish thank you!! it is helpful to me!! |
| 2018-08-19 21:52:23 -0500 | asked a question | [solved]jsk_boundingBOXARRAY can't publish jsk_boundingBOXARRAY can't publish my source code is this include <ros ros.h=""> include <tf transform_broadc |
| 2018-08-17 04:11:08 -0500 | commented answer | any install method of jsk_visualization/jsk_rviz_plugs? thx i didnt know jsk pkg command |
| 2018-08-15 08:29:07 -0500 | asked a question | any install method of jsk_visualization/jsk_rviz_plugs? any install method of jsk_visualization/jsk_rviz_plugs? i want to use box boundering (jsk_pkg) but something error occur |
| 2018-07-03 02:41:34 -0500 | received badge | ● Enthusiast |
| 2018-07-02 02:58:17 -0500 | received badge | ● Popular Question (source) |
| 2018-07-01 06:54:53 -0500 | asked a question | cuda error how to fix it? cuda error how to fix it? ~/NVIDIA_CUDA-9.2_Samples/0_Simple/asyncAPI$ ./asyncAPI [./asyncAPI] - Starting... CUDA error |
| 2018-05-28 10:40:41 -0500 | asked a question | HDL-32E vertical HDL-32E vertical how to change order of velodyne vertical angle first i use velodyne HDL-32E LIDAR and data coming in l |
| 2018-05-27 06:18:04 -0500 | received badge | ● Popular Question (source) |
| 2018-05-27 06:01:16 -0500 | asked a question | hdl-32e velodyne array alogorism hdl-32e velodyne array alogorism I am wondering how data comes in using velodyne HDL-32 products. I wonder if the first |
| 2018-04-10 17:11:27 -0500 | received badge | ● Notable Question (source) |
| 2018-03-27 06:44:31 -0500 | asked a question | velodyne HDL-32E array turn is it? velodyne HDL-32E array turn is it? velodyne layer start ring[0] and end [31]? like this picture? or ring[0] take 0~x |
| 2018-03-22 21:44:46 -0500 | received badge | ● Student (source) |
| 2018-03-22 13:35:48 -0500 | asked a question | it can be use "Identifying ground returns using ProgressiveMorphologicalFilter segmentation" in real time? it can be use "Identifying ground returns using ProgressiveMorphologicalFilter segmentation" in real time? i use this "I |
| 2018-03-22 06:07:22 -0500 | received badge | ● Popular Question (source) |
| 2018-03-21 22:13:08 -0500 | commented question | velodyne(HDL-32E) something shadow occured why it happened? oh thx but how to upload bag file? |
| 2018-03-21 22:12:47 -0500 | commented answer | velodyne(HDL-32E) something shadow occured why it happened? i use bag file but i still can see shadow.. if u check my bagfile? and check shadow occured? if u can help me i give my |
| 2018-03-21 06:58:37 -0500 | asked a question | velodyne(HDL-32E) something shadow occured why it happened? velodyne(HDL-32E) something shadow occured why it happened? https://www.youtube.com/watch?v=HdJarMRYNJU our velodyne us |
| 2018-03-21 06:57:18 -0500 | asked a question | velodyne(HDL-32E) something shadow occured velodyne(HDL-32E) something shadow occured https://www.youtube.com/watch?v=HdJarMRYNJU our velodyne use driver -> ht |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.