The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-05-21 22:55:11 -0500 | received badge | ● Famous Question (source) |
| 2021-10-05 22:04:39 -0500 | received badge | ● Famous Question (source) |
| 2021-08-03 15:04:54 -0500 | received badge | ● Famous Question (source) |
| 2021-08-03 15:04:54 -0500 | received badge | ● Notable Question (source) |
| 2020-10-01 03:24:16 -0500 | received badge | ● Self-Learner (source) |
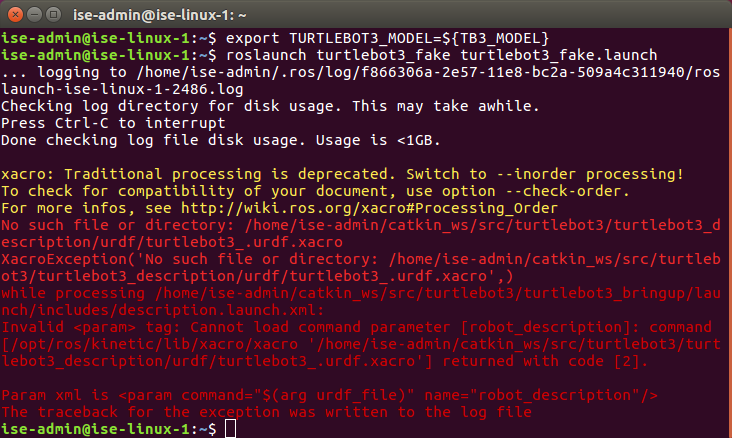
| 2020-09-16 17:32:18 -0500 | marked best answer | When I use Matlab Ros toolbox, turtlebot3 tutorial simulation will not work. It is so strange that I use link text, the fake node works. However, when I use Matlab Ros toolbox, and input some command like "rosinit", the tutorial doesn't work. It shows that I have tried to check the turtlebot3_fake.launch, but it is same to github. I also tried rename a .xarco file as turtlebot3_.urdf.xacro, I copied the code from \ turtlebot3_burger.urdf.xacro to turtlebot3_.urdf.xacro. However, error occurs. I want to know why the tutorial does work.Is there any relationship between the "strike" and "Matlab Ros toolbox"? Thank you! |
| 2020-08-26 06:23:50 -0500 | received badge | ● Notable Question (source) |
| 2020-08-26 06:23:50 -0500 | received badge | ● Famous Question (source) |
| 2020-08-26 06:23:50 -0500 | received badge | ● Popular Question (source) |
| 2020-05-12 05:25:12 -0500 | received badge | ● Famous Question (source) |
| 2020-02-15 00:15:39 -0500 | received badge | ● Popular Question (source) |
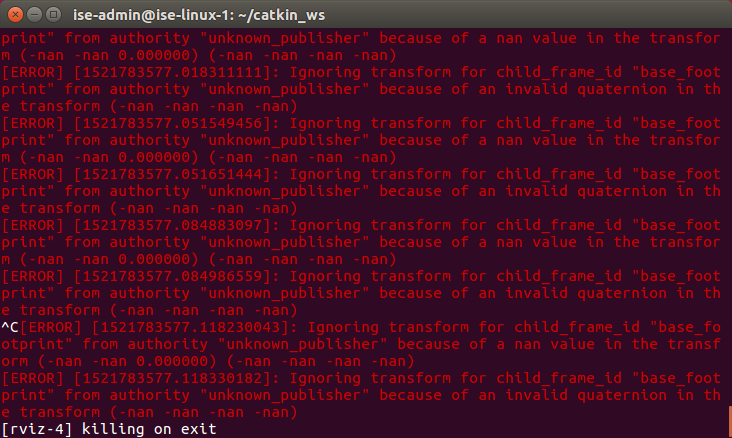
| 2020-02-13 19:18:01 -0500 | commented question | Can't view lidar points in rviz. It seems that something wrong in my broadcaster. Because when I turn off the broadcaster, and then I set Fixed frame as |
| 2020-02-13 18:16:41 -0500 | asked a question | Can't view lidar points in rviz. Can't view lidar points in rviz. Hi, I try to view the lidar points in Rviz, and I tf broadcast topic /scan to /world. |
| 2019-11-26 15:16:49 -0500 | received badge | ● Notable Question (source) |
| 2019-10-17 16:06:25 -0500 | marked best answer | Why it shows unknown substitution command? I try to use a launch file. But it shows unknown substitution command. I don't know why. The terminal shows: I can't find the log file in /.ros/log. Do you know why it shows Unknown substitution command? Thank you! |
| 2019-09-13 20:04:21 -0500 | received badge | ● Student (source) |
| 2019-09-13 19:44:08 -0500 | marked best answer | How to read ros log file? Recently, I write a .launch file. But when I roslaunch it, I get the info as is shown below. In order to find out where are the errors, I hope to open the log file. It seems that the log file is temporary, right? |
| 2019-07-03 01:52:01 -0500 | received badge | ● Famous Question (source) |
| 2019-06-26 04:25:57 -0500 | received badge | ● Popular Question (source) |
| 2019-06-08 02:00:49 -0500 | asked a question | How to change velocity limit in Gazebo simulation How to change velocity limit in Gazebo simulation Hi there. I was thinking to track an obstacle in fast moving condition |
| 2019-04-04 07:46:27 -0500 | received badge | ● Famous Question (source) |
| 2019-03-22 04:47:27 -0500 | received badge | ● Famous Question (source) |
| 2019-02-21 18:33:11 -0500 | received badge | ● Famous Question (source) |
| 2019-02-21 18:33:11 -0500 | received badge | ● Notable Question (source) |
| 2019-02-17 21:44:03 -0500 | received badge | ● Notable Question (source) |
| 2019-02-17 18:58:43 -0500 | commented answer | How to read msg from /odom at time series n and (n-1) Thank you! They said that I can check something like time in msg.header.stamp to get the msg time |
| 2019-02-17 18:56:44 -0500 | received badge | ● Famous Question (source) |
| 2019-02-17 18:36:21 -0500 | received badge | ● Notable Question (source) |
| 2019-02-16 19:28:22 -0500 | commented answer | How to read msg from /odom at time series n and (n-1) Learn a new word "Instantiate", thank you! |
| 2019-02-16 19:26:50 -0500 | commented answer | How to read msg from /odom at time series n and (n-1) Thank you very much! |
| 2019-02-16 19:26:13 -0500 | marked best answer | How to read msg from /odom at time series n and (n-1) Hi there, I hope to compare the message from the consecutive time series n and (n-1) from /odom in python. I am confused about how to store the msg at time n-1 and time n at the same time, especially for the time sequence t=1. The problem which confused me is that: I was thinking to use some variables to store the msg at sequence n-1 and n like : current_odom=[ ] and last_odom=[ ]. However, I don't how to store the msg at time t=1, because listener() and simple_callback are in loop, I don't know when to pass the data in current_odom=[ ] and last_odom=[ ]. Could you please give me any hints? Thank you. |
| 2019-02-16 18:45:09 -0500 | received badge | ● Popular Question (source) |
| 2019-02-16 17:26:12 -0500 | commented answer | How to read msg from /odom at time series n and (n-1) Does last_odom = Odometry() mean generate an "object of Odometry" ? |
| 2019-02-16 10:10:32 -0500 | edited question | How to read msg from /odom at time series n and (n-1) How to read msg from /odom at time series n and (n-1) Hi there, I hope to compare the message from the consecutive time |
| 2019-02-16 10:10:01 -0500 | asked a question | How to read msg from /odom at time series n and (n-1) How to read msg from /odom at time series n and (n-1) Hi there, I hope to compare the message from the consecutive time |
| 2019-02-13 21:42:59 -0500 | commented answer | What is the ros::spin rate? Got it ! Thank you! |
| 2019-02-13 11:22:21 -0500 | commented answer | What is the ros::spin rate? @gvdhoorn. Thank you. You mean there is some kind of time delay if the message has too much data? Do you think the messa |
| 2019-02-13 11:11:49 -0500 | received badge | ● Popular Question (source) |
| 2019-02-13 11:09:21 -0500 | marked best answer | What is the ros::spin rate? Hi, I need to run a moving robot in simulation and I need to know the translation and rotation of this robot. I was thinking to use the translation = linear.velocity *dt, and rotation = linear.velocity.z * dt. But I don't know what dt is. I have a subscriber with ros::spin() to subscriber the /cmd_vel topic.
Thank you! |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.