The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-09-12 02:44:37 -0500 | received badge | ● Favorite Question (source) |
| 2021-01-27 13:08:48 -0500 | received badge | ● Taxonomist |
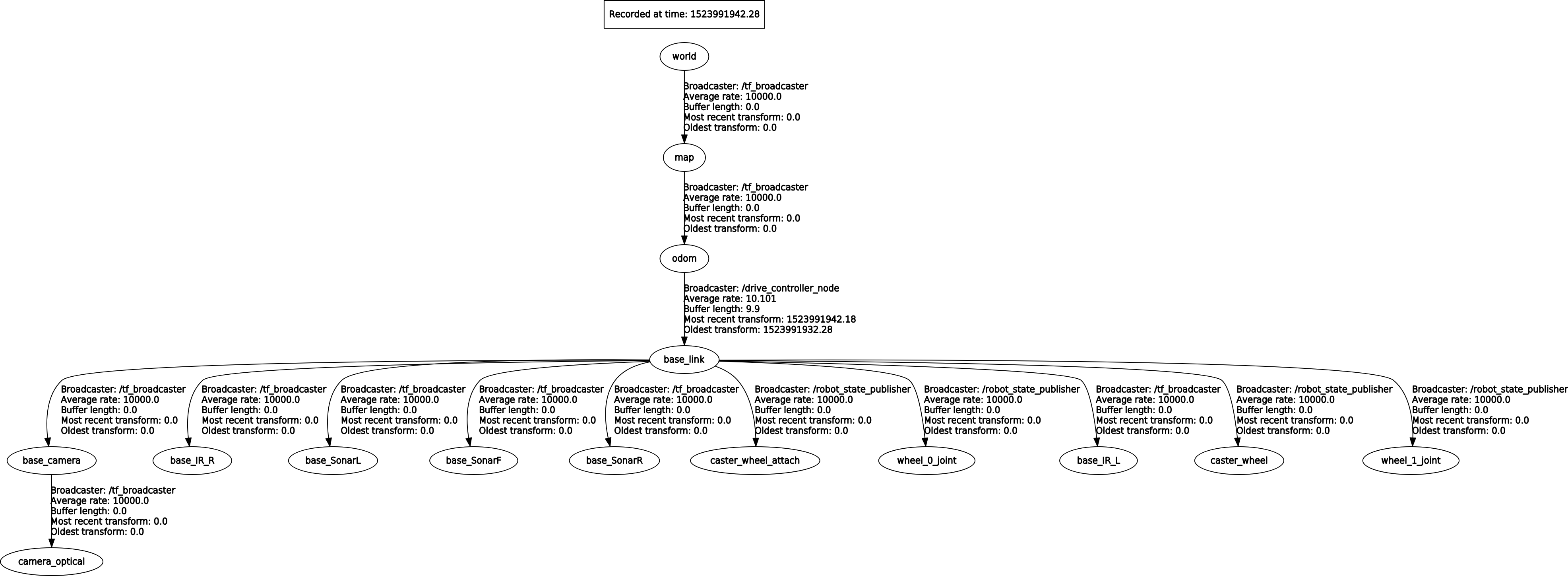
| 2020-07-28 15:00:41 -0500 | marked best answer | RViz error:Transform [sender=unknown_publisher] - For frame [X]: Frame [X] does not exist [ROS Kinetic, Ubuntu 16.04] Hello, I have a problem with sensor frames in rviz. I have created a static trasform broadcaster that publishes all static transforms of my robot (did it according to http://wiki.ros.org/tf2/Tutorials ). Map->odom tf is created temporarily as static, until I integrate some SLAM module. Now map and odom coordinate systems are placed in the same position. Odom->base link is published by ros_controllers node. The tf tree looks as follows:
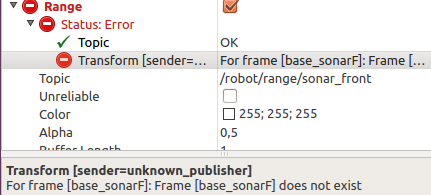
However when I start a visualization in rviz I can't see any sensor_msgs::Range data (from any of my 3 sonars) but I can choose corresponding topics. Rviz shows error (example, shows similar for other sonars): "Transform [sender=unknown_publisher] - For frame [base_sonarF]: Frame [base_sonarF] does not exist".
I am really confused as you can see on the tf_tree that the system recognizes transforms I'm publishing. Is it rviz error or I did something wrong? In my URDF file I didn't create any joints for sonars, only for wheels and base, if that matters. When I'm echoing sonar topics everything seems to be right, especially distances from obstacles. I've found same issue in other questions but none of the solutions worked (like adding marker in rviz, making sonar's frame a fixed frame). Thanks in advance. |
| 2020-05-08 06:58:13 -0500 | received badge | ● Good Question (source) |
| 2020-04-07 19:17:40 -0500 | received badge | ● Self-Learner (source) |
| 2020-03-18 06:53:37 -0500 | received badge | ● Nice Question (source) |
| 2019-02-28 05:50:03 -0500 | received badge | ● Student (source) |
| 2019-02-04 02:37:50 -0500 | received badge | ● Famous Question (source) |
| 2018-12-23 08:56:21 -0500 | commented question | ROS in eclipse - not compiling std libs It's something like Project->Properties->C/C++ General->Paths and Symbols or Preprocessor Include Paths, Macros |
| 2018-12-23 03:07:48 -0500 | commented question | ROS in eclipse - not compiling std libs Have a look at this: ETHZ You should also remember to set manually in Eclipse include path to your c++ std libs directo |
| 2018-12-23 03:03:32 -0500 | commented question | How to setup diff_drive_controller to make it work with ros_control's velocity_controllers? No, sorry, I didn't need velocity filtering. Anyway, I'm glad I could help you a little. |
| 2018-11-30 02:34:29 -0500 | commented question | How to setup diff_drive_controller to make it work with ros_control's velocity_controllers? Unfortunately I had no luck. Finally used this package pid and it worked perfectly. EDIT: I forgot to post a link to my |
| 2018-11-27 15:05:48 -0500 | commented question | How to setup diff_drive_controller to make it work with ros_control's velocity_controllers? Unfortunately I had no luck. Finally used this package pid and it worked perfectly. |
| 2018-11-27 15:04:53 -0500 | commented question | How to setup diff_drive_controller to make it work with ros_control's velocity_controllers? Unfortunately I had no luck. Finally used this package http://wiki.ros.org/pid and it worked perfectly. |
| 2018-08-17 03:48:06 -0500 | received badge | ● Famous Question (source) |
| 2018-07-23 16:19:44 -0500 | received badge | ● Famous Question (source) |
| 2018-07-03 07:36:57 -0500 | received badge | ● Famous Question (source) |
| 2018-07-03 07:36:06 -0500 | received badge | ● Famous Question (source) |
| 2018-07-03 07:36:06 -0500 | received badge | ● Notable Question (source) |
| 2018-07-03 07:36:04 -0500 | received badge | ● Notable Question (source) |
| 2018-06-11 08:38:52 -0500 | marked best answer | move_base to use map published on a certain topic Hello, I'm having trouble trying to make my I mean that I would like I'm using visual SLAM. I have PCL data but can't use it directly as I have to perform some space clearing operations. Ready to use map is published as a ROS message of type What's problematic here is that I can successfully use Here are my current configuration files: Local costmap: Common parameters: Static map layer: So at the moment I don't use static map layer and everything loads correctly except that blank costmaps are published (global and local). No error is shown. Otherwise, if I enable static map layer, set global and local costmaps to use rolling window and non-static map I'm sure that topic name is correct. In the static map layer there is parameter defined and run Any tips are welcome. |
| 2018-06-10 20:24:15 -0500 | received badge | ● Popular Question (source) |
| 2018-06-10 19:29:37 -0500 | answered a question | move_base to use map published on a certain topic There was a conflict in parameter names. I've been trying to load costmap's static layer static_map parameters into move |
| 2018-06-10 04:21:26 -0500 | edited question | move_base to use map published on a certain topic move_base to use map published on a certain topic Hello, I'm having trouble trying to make my move_base constantly subsc |
| 2018-06-10 04:16:43 -0500 | asked a question | move_base to use map published on a certain topic move_base to use map published on a certain topic Hello, I'm having trouble trying to make my move_base constantly subsc |
| 2018-05-31 15:57:45 -0500 | received badge | ● Famous Question (source) |
| 2018-05-31 09:52:26 -0500 | answered a question | Active ORB_SLAM2 fork? This one hasn't been updated recently, but it exposes a lot more features from ORB-SLAM2 algorithm on ROS topics compari |
| 2018-05-27 16:07:40 -0500 | received badge | ● Popular Question (source) |
| 2018-05-26 19:47:25 -0500 | asked a question | How to setup diff_drive_controller to make it work with ros_control's velocity_controllers? How to setup diff_drive_controller to make it work with ros_control's velocity_controllers? Hello, I'm quite confused wi |
| 2018-05-01 04:37:52 -0500 | received badge | ● Notable Question (source) |
| 2018-04-30 07:01:06 -0500 | received badge | ● Notable Question (source) |
| 2018-04-28 11:09:04 -0500 | received badge | ● Popular Question (source) |
| 2018-04-28 09:02:18 -0500 | edited question | Visual SLAM and coordinate frames for a mobile robot Visual SLAM and coordinate frames for a mobile robot [ROS Kinetic, Ubuntu 16.04] Hello again. I followed tf tutorials, |
| 2018-04-28 09:02:18 -0500 | received badge | ● Editor (source) |
| 2018-04-28 08:21:42 -0500 | marked best answer | Very low image publish rate from raspicam_node over WiFi Hi. I'm facing a problem of very slow forwarding of sensor_msgs::ImageCompressed data between 2 devices in my local network. Sorry if answer to this question is not very ROS related, but I have no idea where the problem is. It's the slave machine which publishes images (Raspberry Pi 3 with Ubuntu 16.04 and ROS Kinetic using Raspberry Pi Camera v1.3) and the master (my laptop with Ubuntu 16.04 and ROS Kinetic) which subscribes a /raspicam_node/image/compressed topic. Image data will be used in ORB-SLAM2 algorithm which will be executed on master machine. The problem is that master machine receives new data with very low rates 0.5-3 Hz. I would be content with at least 10 Hz rate. Those are example listings from terminal: rostopic hz: rostopic hz: rostopic bw: I checked what will happen if I run raspicam_node separately on Raspberry Pi (made RPi master and ran raspicam_node on it) and "rostopic hz" returned 70 Hz (with desired 90 fps) or 30 Hz (with desired 30 fps - set in yaml file). I don't think that it is possible that transmitting such amount of data (640x480 pixels image) would choke bandwidth - rostopic bw shows about 85KB/s which is nothing comparing to RPi possibilities (100Mb/s if I remember correctly). I'm using UbiquityRobotics' raspicam_node ( https://github.com/UbiquityRobotics/r... ) which uses typical publish message engine. I was trying to change it for image_transport but catkin build threw some errors and I forgot it. I followed all build instructions except network setup, which I've done before. I also have to admit that if I run rqt_image_view the image shown in gui seems to be delayed few seconds (but I don't think that matters in this situation). I didn't calibrate camera so far too (just wrote some random numbers into .yaml file ... (more) |
| 2018-04-28 04:31:47 -0500 | asked a question | Visual SLAM and coordinate frames for a mobile robot Visual SLAM and coordinate frames for a mobile robot [ROS Kinetic, Ubuntu 16.04] Hello again. I followed tf tutorials, |
| 2018-04-27 09:13:44 -0500 | received badge | ● Self-Learner (source) |
| 2018-04-27 09:13:44 -0500 | received badge | ● Teacher (source) |
| 2018-04-27 09:13:30 -0500 | received badge | ● Notable Question (source) |
| 2018-04-26 11:48:31 -0500 | answered a question | Very low image publish rate from raspicam_node over WiFi @jarvisschultz You were right. The quality parameter plays a big role in frequency that master receives images from slav |
| 2018-04-22 13:22:48 -0500 | commented question | Very low image publish rate from raspicam_node over WiFi From a slave (RPi) point of view the /raspicam_node/image_raw topic is published at frequency of 5 Hz (rostopic hz) whic |
| 2018-04-22 13:19:04 -0500 | commented question | Very low image publish rate from raspicam_node over WiFi I tested https://github.com/dganbold/raspicam_node package which provides direct possibility to publish raw images. It t |
| 2018-04-22 06:10:04 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.