| 2020-05-04 09:21:30 -0500 | received badge | ● Famous Question
(source)
|
| 2019-10-15 02:10:44 -0500 | marked best answer | sequence of goals on rviz for robot navigation Hi every one, I want my TurtleBot robot to navigate on environment map autonomous. I found that it is using amcl, which allow to give a goal to the robot in rviz then robot will move to it, but this is not so great. I found that there is exploration I still try to run it.
:
now I want to know 1- If I can give the robot a sequence of goals instead of one goal on rviz to work as if it explore all the environment not just move to one place on it ?! 2- If I can link each goal with specific action for example to do object recognition at specific point on the map ?! Thanks, |
| 2016-06-28 08:44:30 -0500 | received badge | ● Good Question
(source)
|
| 2016-04-26 20:59:05 -0500 | received badge | ● Nice Question
(source)
|
| 2015-09-18 19:00:16 -0500 | marked best answer | turtlebot simulator warning .. Hi all, When I open turtlebot_gazebo by this roslaunch turtlebot_gazebo turtlebot_empty_world.launch
((1)) Give me warning
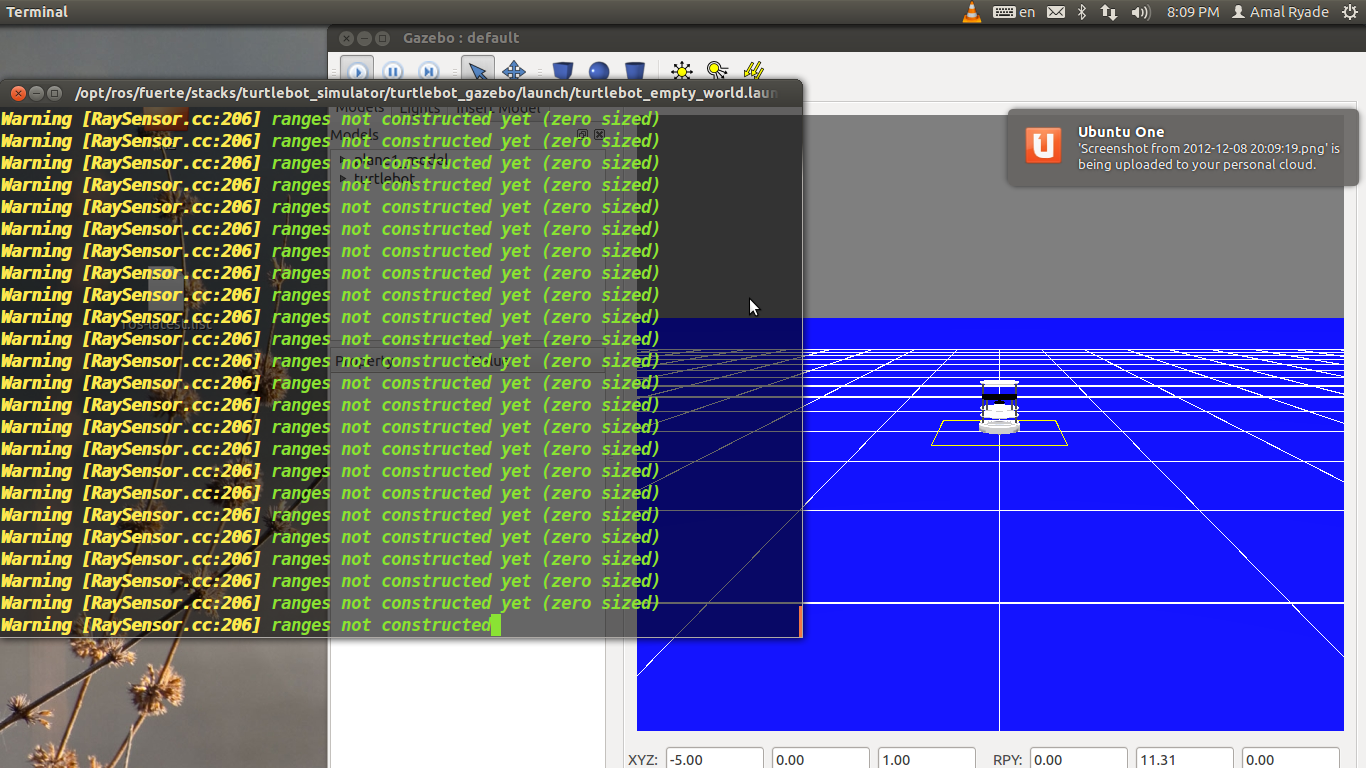 ((2)) want to know if there is a difference between Gazebo and Gazebo: default ?! Thanks in Advance |
| 2015-09-18 18:59:46 -0500 | received badge | ● Famous Question
(source)
|
| 2014-11-20 21:39:16 -0500 | received badge | ● Favorite Question
(source)
|
| 2014-04-20 13:12:31 -0500 | marked best answer | Link between Robot Perception and Knowledge Representation?! Hello!! How Link between Robot Perception and Knowledge Representation, I mean Robot now see a cup how it can link this with its knowledge about this cup properties ?! |
| 2014-04-20 06:54:50 -0500 | marked best answer | How to run follower demo using voice control demo ? Hi all, I try Turtlebot Voice Control Demo, and it worked . Now I want to add new voice instruction, so I add this instructions in nav_command.txt and upload it to Sphinx Knowledge Base Tool
I finish this step successfully
Now I have to modify on voic_nav.py which map the voice instruction into robot action
If I want to say "come with me" so this voice instruction make robot run follower demo ! any one have idea how to do this ! Thanks in Advance |
| 2014-04-20 06:54:02 -0500 | marked best answer | TurtleBot Moves in Real Environment and Gazebo World Hi All,
I build environment in gazbo, and run make turtlebot move in it and draw map in rviz. What I want to do know, is to give turtlebot move commands so it move in real environment and move in gazebo and draw map in Rviz all at the same time .. What i found is that command go to gazebo or real robot but not the two here is all [Topics] run (/upfiles/13653369789478456.png) Thanks |
| 2014-04-20 06:53:42 -0500 | marked best answer | how to edit in turtlebot _description package Hi , I am successfully build a map in rviz for a simple_office.world. now I want to edit in robot description to remove gyro from the robot model that loaded to gazebo. There is a package turtlebot_description/urdf/files.urdf.xacro ... so I think The gyro is defined in turtlebot_body.urdf.xacro, but I can not edit on it .. How to edit it to remove gyro part .. also want to know if there is another files I have to edit on I want to remove gyro, because I do not have a gyro on my real iRobot Create base.. any suggestion Thanks |
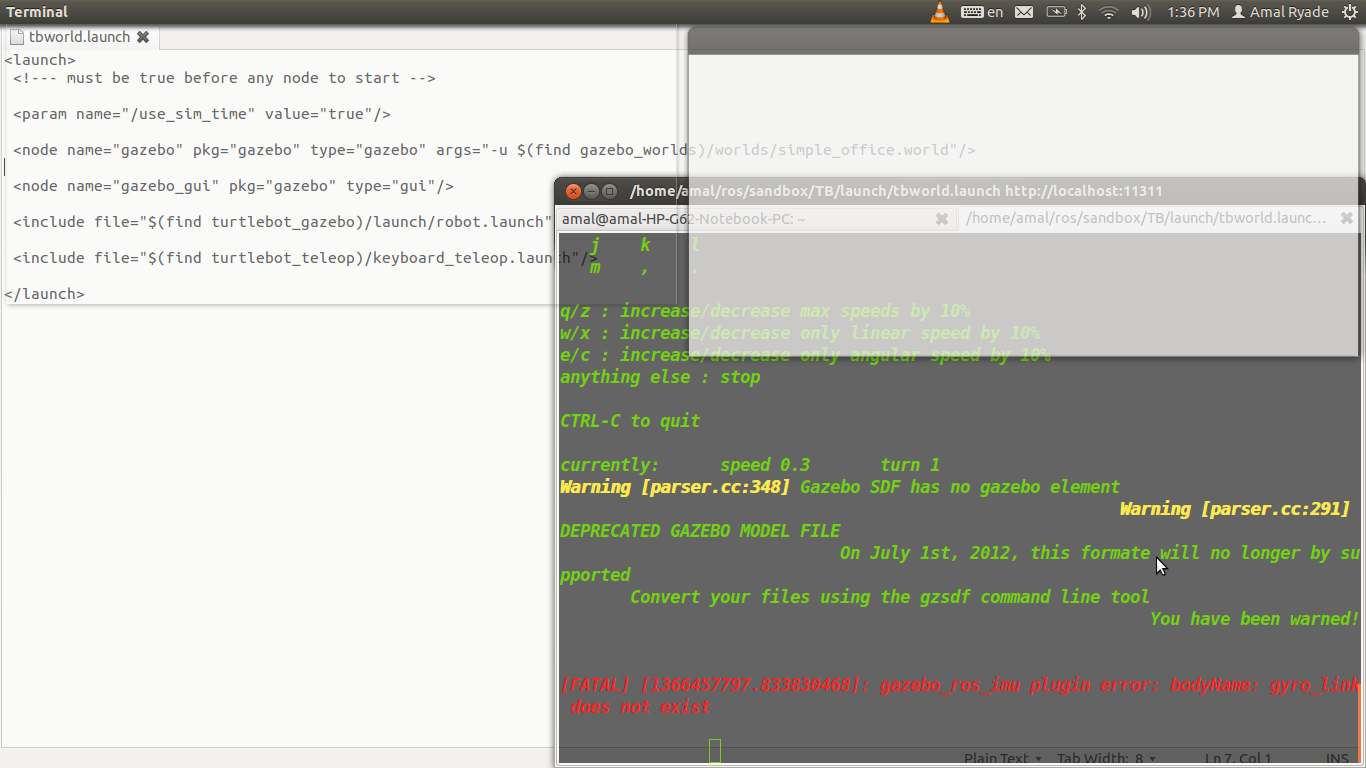
| 2014-04-20 06:53:40 -0500 | marked best answer | `Message No map received` in Rviz Hi, I try to build a map in Rviz using turtlebot simulation in gazebo. First I create a package and write a launch file which open GAZEBO world and turtlebot in that environment ... That is the Launch file <launch>
<node name="gazebo" pkg="gazebo" type="gazebo" args="-u $(find gazebo_worlds)/worlds/simple_office.world"/>
<param name="/use_sim_time" value="true"/>
<node name="gazebo_gui" pkg="gazebo" type="gui"/>
<include file="$(find turtlebot_gazebo)/launch/robot.launch"/>
<include file="$(find turtlebot_teleop)/keyboard_teleop.launch"/>
</launch>
Then I run rosrun gmapping slam_gmapping scan:=base_scan _odom_frame:=odom_combined Then open Rviz with rosrun rviz rviz -d 'rospack find turtlebot_navigation' /nav_rviz.vcg , this command does not open plugins required for gmapping as it can not locate nav_rviz.vcg, so finally I open rviz from launch file <launch>
<node pkg="rviz" type="rviz" name="$(anon rviz)" args="-d $(find turtlebot_navigation)/nav_rviz.vcg"> </node>
</launch>
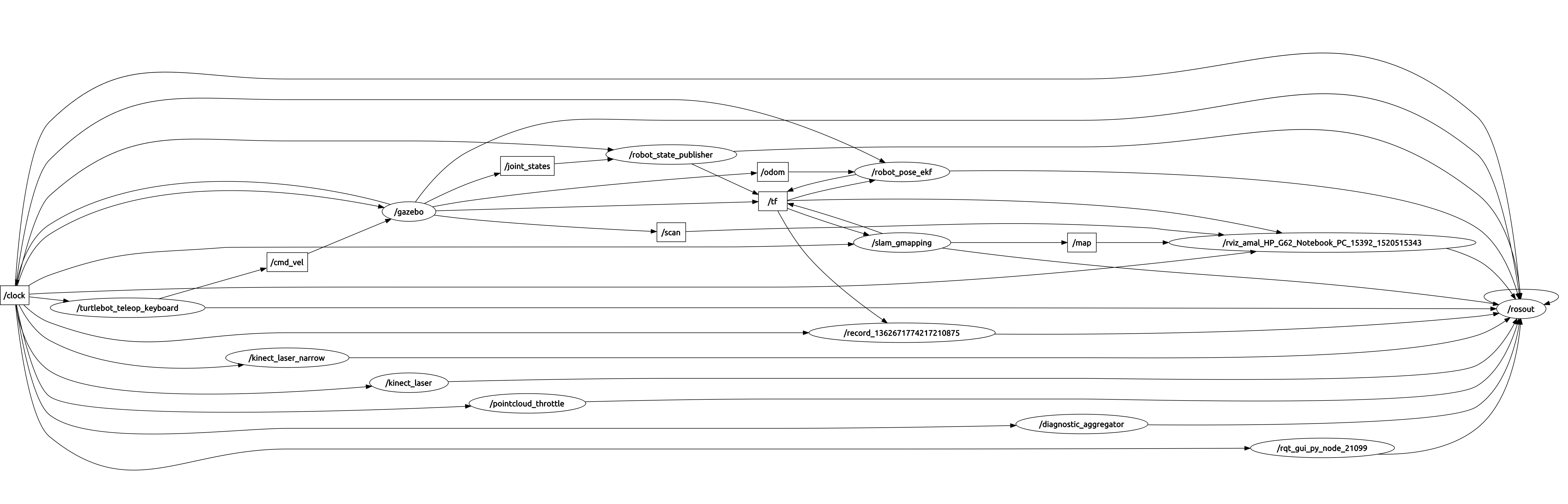
It work well at lest it run all requirements for gmapping .... The problem now that when I move robot in gazebo, robot move in rviz too but does not make a map, and I find that massage in rviz : Message No map received Edit
I write this command amal@amal-HP-G62-Notebook-PC:~$ rosrun gmapping slam_gmapping scan:=base_scan _odom_frame:=odom_combined
and nothing else in is written in terminal
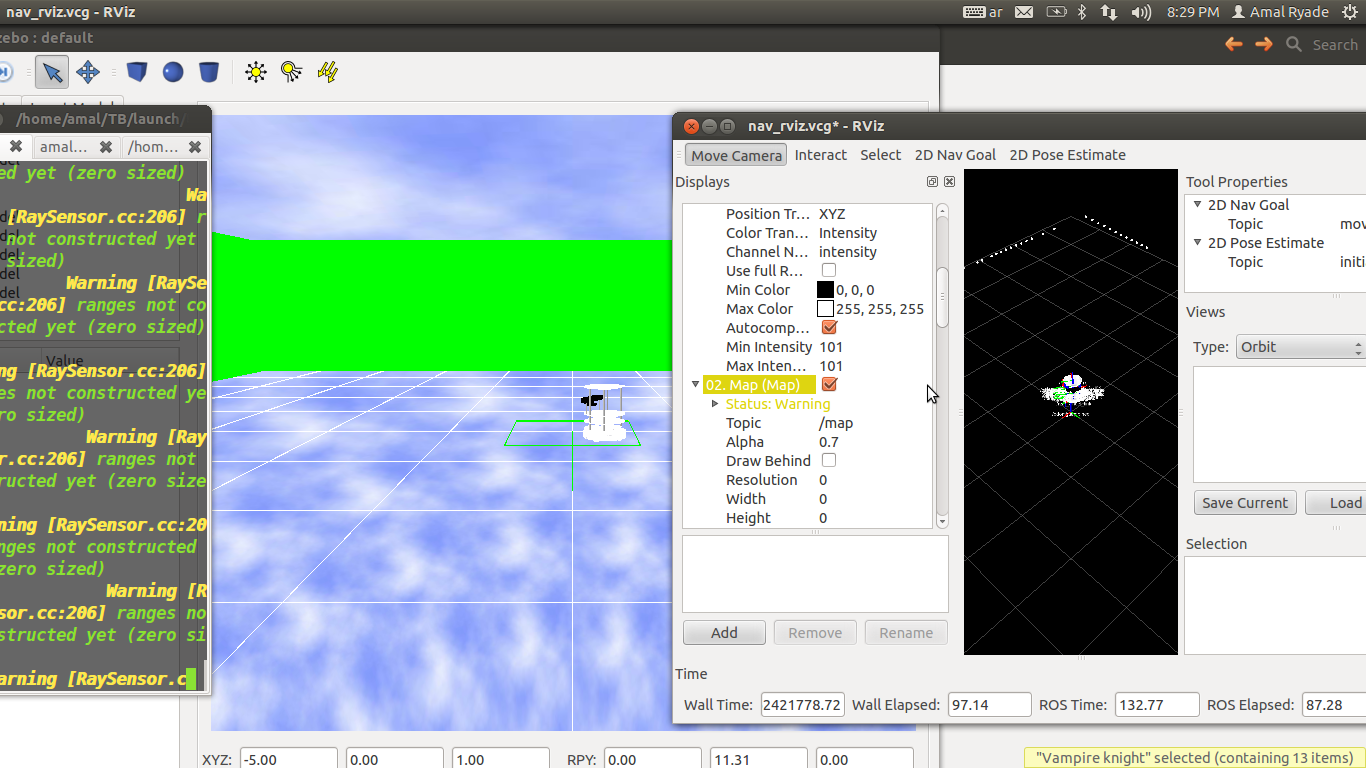
see warning All nodes that run and topics Edit2 That is the map
but I think it will not accurate if there is more details in the environment and It seems to be footprints !! Edit3 Hi, I have a problem now, when I open RVIZ it seem there is a problem in laser scan, map, robot model, and tf here is do not know which file I have to check gyro in !!
That is the error any suggestion ,
Thanks |
| 2014-04-20 06:53:33 -0500 | marked best answer | Package Dependency Rules ?! Hi all, I read in this document p05-ros-navigacija.pdf Create Package with its dependency, then launch folder with launch file to load TurtleBot in simple office environment. Then when run $ roslaunch ros_liv_turtlebot office_turtlebot.launch get this message cannot locate [office_turtlebot.launch] in package [ros_liv_turtlebot]
I try to follow error amal@amal-HP-G62-Notebook-PC:~/ros/sandbox/ros_liv_turtlebot$ roswtf
Loaded plugin tf.tfwtf
Package: ros_liv_turtlebot
================================================================================
Static checks summary:
Found 1 warning(s).
Warnings are things that may be just fine, but are sometimes at fault
WARNING The following packages have msg/srv-related cflags exports that are no longer necessary
<export>
<cpp cflags="..."
</export>:
* dynamic_reconfigure: -I${prefix}/msg/cpp -I${prefix}/srv/cpp
Found 1 error(s).
ERROR The following packages have rpath issues in manifest.xml:
* ros_liv_turtlebot: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* rosconsole: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* turtlebot_teleop: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* actionlib_msgs: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* nodelet_topic_tools: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* diagnostic_updater: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* rotate_recovery: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* nav_core: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* pcl_ros: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* nav_msgs: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* laser_geometry: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* clear_costmap_recovery: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* roscpp: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* roslib: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* voxel_grid: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* rostest: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* pcl: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* visualization_msgs: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* tf: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* nodelet: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* move_base: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* map_server: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* message_filters: found flag "-L ...
(more) |
| 2014-04-20 06:53:28 -0500 | marked best answer | Benefits Behind Gazebo Simulator ! hi,
What values do we add to a robot by building a world in gazebo simulator, like the one here ? Thanks |
| 2014-04-20 06:53:08 -0500 | marked best answer | json_prolog cpp client error ?! Hi, I try to call json_prolog cpp client, and get that error amal@amal-HP-G62-Notebook-PC:~/ros/stacks/knowrob/json_prolog/bin$ ./object_positions
terminate called after throwing an instance of 'json_prolog::PrologQueryProxy::ServerNotFound'
what(): No connection to the json_prolog server.
Aborted (core dumped)
amal@amal-HP-G62-Notebook-PC:~/ros/stacks/knowrob/json_prolog/bin$ roswtfLoaded plugin tf.tfwtf
Package: json_prolog
================================================================================
Static checks summary:
Found 1 error(s).
ERROR The following packages have rpath issues in manifest.xml:
* json_prolog: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* rosjava_jni: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* roscpp: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* roslib: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
* std_msgs: found flag "-L/opt/ros/fuerte/lib", but no matching "-Wl,-rpath,/opt/ros/fuerte/lib"
================================================================================
Beginning tests of your ROS graph. These may take awhile...
analyzing graph...
... done analyzing graph
running graph rules...
ERROR: connection refused to [http://amal-HP-G62-Notebook-PC:60818/]
... done running graph rules
Online checks summary:
Found 4 error(s).
ERROR Communication with [/rosout] raised an error:
ERROR Could not contact the following nodes:
* /fridge_handle
ERROR The following nodes should be connected but aren't:
* /fridge_handle->/rosout (/rosout)
ERROR Errors connecting to the following services:
* service [/fridge_handle/get_loggers] appears to be malfunctioning: Unable to communicate with service [/fridge_handle/get_loggers], address [rosrpc://amal-HP-G62-Notebook-PC:41882]
* service [/fridge_handle/set_logger_level] appears to be malfunctioning: Unable to communicate with service [/fridge_handle/set_logger_level], address [rosrpc://amal-HP-G62-Notebook-PC:41882]
Thanks |
| 2014-04-20 06:53:08 -0500 | marked best answer | How troubleshoot ERROR: toplevel: Undefined procedure ?! Hello,
I Follow: Knowledge Processing For Autonomous Robot I write a simple knowledge base as a test.pl in prolog file, in my package then I try to query it prolog -f test.pl
and I get a top level error ! ?- cup(cup0).
ERROR: toplevel: Undefined procedure: cup/1 (DWIM could not correct goal)
Edit amal@amal-HP-G62-Notebook-PC:~$ prolog -f test.pl
Welcome to SWI-Prolog (Multi-threaded, 32 bits, Version 5.10.4)
Copyright (c) 1990-2011 University of Amsterdam, VU Amsterdam
SWI-Prolog comes with ABSOLUTELY NO WARRANTY. This is free software,
and you are welcome to redistribute it under certain conditions.
Please visit http://www.swi-prolog.org for details.
For help, use ?- help(Topic). or ?- apropos(Word).
?- cup(cup0).
ERROR: toplevel: Undefined procedure: cup/1 (DWIM could not correct goal)
?-
and that is what in test.pl cup(cup0).
dairyProduct(milk1).
meatProduct(ham2).
cupboard(cupboard3).
refrigerator(fridge4).
perishable(Prod) :- dairyProduct(Prod), meatProduct(Prod).
storagePlaceFor(Loc, Item) :- refrigerator(Loc), perishable(Item).
storagePlaceFor(Loc, Item) :- cupboard(Loc), cup(Item).
searchForIn(Item,Loc) :- storagePlaceFor(Loc, Item).
any suggestion ?! Thanks. |
| 2014-04-20 06:52:43 -0500 | marked best answer | can not edit in pg_ident.conf Hi, how to make pg_ident.conf easy accessible and edit on it. any suggestion ?! |
| 2014-04-20 06:52:38 -0500 | marked best answer | undefined reference to symbol 'vtable for boost::detail::thread_data_base' hi all, I am trying to build macros to add executable.
I create my package and add this rosbuild_add_executable(mytele_keyboard src/turtlebot_key.cpp) in CMakeLists.txt then When do rosmake my package I get 1 failure !!
I am now try to understand what is wrong
amal@amal-HP-G62-Notebook-PC:/opt/ros/fuerte/stacks/turtlebot_apps/turtlebot_teleop/src$ rosmake mytele
[ rosmake ] rosmake starting...
[ rosmake ] Packages requested are: ['mytele']
[ rosmake ] Logging to directory /home/amal/.ros/rosmake/rosmake_output-20121210-031624
[ rosmake ] Expanded args ['mytele'] to:
['mytele']
[rosmake-0] Starting >>> geometry_msgs [ make ]
[rosmake-1] Starting >>> roslang [ make ]
[rosmake-0] Finished <<< geometry_msgs No Makefile in package geometry_msgs
[rosmake-1] Finished <<< roslang No Makefile in package roslang
[rosmake-1] Starting >>> rospy [ make ]
[rosmake-3] Starting >>> roscpp [ make ]
[rosmake-1] Finished <<< rospy No Makefile in package rospy
[rosmake-3] Finished <<< roscpp No Makefile in package roscpp
[rosmake-3] Starting >>> mytele [ make ]
[ rosmake ] Last 40 linestele: 0.8 sec ] [ 1 Active 4/5 Complete ]
{-------------------------------------------------------------------------------
mkdir -p bin
cd build && cmake -Wdev -DCMAKE_TOOLCHAIN_FILE=`rospack find rosbuild`/rostoolchain.cmake ..
[rosbuild] Building package mytele
[rosbuild] Including /opt/ros/fuerte/share/roscpp/rosbuild/roscpp.cmake
[rosbuild] Including /opt/ros/fuerte/share/rospy/rosbuild/rospy.cmake
[rosbuild] Including /opt/ros/fuerte/stacks/client_rosjava_jni/rosjava_jni/cmake/rosjava.cmake
[rosbuild] Including /opt/ros/fuerte/share/roslisp/rosbuild/roslisp.cmake
-- Configuring done
-- Generating done
CMake Warning:
Manually-specified variables were not used by the project:
CMAKE_TOOLCHAIN_FILE
-- Build files have been written to: /home/amal/ros/sandbox/turtlebot_sim/mytele/build
cd build && make -l4
make[1]: Entering directory `/home/amal/ros/sandbox/turtlebot_sim/mytele/build'
make[2]: Entering directory `/home/amal/ros/sandbox/turtlebot_sim/mytele/build'
make[3]: Entering directory `/home/amal/ros/sandbox/turtlebot_sim/mytele/build'
make[3]: Leaving directory `/home/amal/ros/sandbox/turtlebot_sim/mytele/build'
[ 0%] Built target rospack_genmsg_libexe
make[3]: Entering directory `/home/amal/ros/sandbox/turtlebot_sim/mytele/build'
make[3]: Leaving directory `/home/amal/ros/sandbox/turtlebot_sim/mytele/build'
[ 0%] Built target rosbuild_precompile
make[3]: Entering directory `/home/amal/ros/sandbox/turtlebot_sim/mytele/build'
make[3]: Leaving directory `/home/amal/ros/sandbox/turtlebot_sim/mytele/build'
make[3]: Entering directory `/home/amal/ros/sandbox/turtlebot_sim/mytele/build'
Linking CXX executable ../bin/mytele_keyboard
/usr/bin/ld: CMakeFiles/mytele_keyboard.dir/src/turtlebot_key.o: undefined reference to symbol 'vtable for boost::detail::thread_data_base'
/usr/bin/ld: note: 'vtable for boost::detail::thread_data_base' is defined in DSO /usr/lib/libboost_thread.so.1.46.1 so try adding it to the linker command line
/usr/lib/libboost_thread.so.1.46.1: could not read symbols: Invalid operation
collect2: ld returned 1 exit status
make[3]: *** [../bin/mytele_keyboard] Error 1
make[3]: Leaving directory `/home/amal/ros/sandbox/turtlebot_sim/mytele/build'
make[2]: *** [CMakeFiles/mytele_keyboard.dir/all] Error 2
make[2]: Leaving directory `/home/amal/ros/sandbox/turtlebot_sim/mytele/build'
make[1]: *** [all] Error 2
make[1]: Leaving directory `/home/amal/ros/sandbox/turtlebot_sim/mytele/build'
-------------------------------------------------------------------------------}
[ rosmake ] Output from build of package mytele written to:
[ rosmake ] /home/amal/.ros/rosmake/rosmake_output-20121210-031624/mytele/build_output.log
[rosmake-3] Finished <<< mytele [FAIL] [ 0.89 seconds ]
[ rosmake ] Halting due to failure in package mytele.
[ rosmake ] Waiting for other ...
(more) |
| 2014-04-20 06:52:33 -0500 | marked best answer | How to load KnowRob to My package ?! Hi, I create a Test package and want to load KnowRob system to it.
So
((1)) How to do this?!! ((2)) What dependencies I have to define, I define
std_msgs
roslang
rospy
roscpp
My system:
I work in Ubuntu 12.o4 and install fuerte. In home I have a ros which contain KnowRob, RoboEarth, and ccny_vision . I add to it sandbox and create my test package in this sandbox Thanks |
| 2014-04-20 06:52:32 -0500 | marked best answer | visualize omics ?! Hi,
I was reading in commonsense knowledge here ' http://ias.in.tum.de/kb/wiki/index.php/Commonsense_reasoning_about_object_locations '
but I want to visualize parts of the output
so I run first rosrun rosprolog rosprolog mod_vis and open knowrob_omics from inside by register_ros_package(knowrob_omics). and then open visualization convas to start querying and visualizations of what geten out but it not success, so I want to know
that is all after launch mod_vis ?- register_ros_package(knowrob_omics).
% Parsed "locations.rdf" in 0.05 sec; 1,344 triples
Warning: /home/amal/ros/stacks/knowrob/knowrob_omics/prolog/omics.pl:137:
Singleton variables: [O]
% library(omics) compiled into omics 0.00 sec, 6,312 bytes
% /home/amal/ros/stacks/knowrob/knowrob_omics/prolog/init.pl compiled 0.06 sec, 65,300 bytes
true.
?- register_ros_package(ias_semantic_map).
% Parsed "comp_temporal.owl" in 0.01 sec; 164 triples
Warning: /opt/ros/fuerte/stacks/knowrob/comp_temporal/prolog/comp_temporal.pl:74:
Goal (directive) failed: comp_temporal:owl_parser:owl_parse(../owl/comp_temporal.owl,false,false,true)
% library(comp_temporal) compiled into comp_temporal 0.01 sec, 24,168 bytes
Warning: /opt/ros/fuerte/stacks/knowrob/comp_temporal/prolog/init.pl:30:
Goal (directive) failed: user:owl_parser:owl_parse(/opt/ros/fuerte/stacks/knowrob/comp_temporal/owl/comp_temporal.owl,false,false,true)
% /opt/ros/fuerte/stacks/knowrob/comp_temporal/prolog/init.pl compiled 0.02 sec, 27,548 bytes
% Parsed "comp_spatial.owl" in 0.00 sec; 52 triples
Warning: /opt/ros/fuerte/stacks/knowrob/comp_spatial/prolog/comp_spatial.pl:51:
Goal (directive) failed: comp_spatial:owl_parser:owl_parse(../owl/comp_spatial.owl,false,false,true)
% library(comp_spatial) compiled into comp_spatial 0.01 sec, 25,256 bytes
Warning: /opt/ros/fuerte/stacks/knowrob/comp_spatial/prolog/init.pl:32:
Goal (directive) failed: user:owl_parser:owl_parse(/opt/ros/fuerte/stacks/knowrob/comp_spatial/owl/comp_spatial.owl,false,false,true)
% /opt/ros/fuerte/stacks/knowrob/comp_spatial/prolog/init.pl compiled 0.04 sec, 69,248 bytes
% library(semweb/actionmodel) compiled into actionmodel 0.01 sec, 63,772 bytes
% Parsed "ccrl2_semantic_map.owl" in 0.07 sec; 2,976 triples
Warning: /opt/ros/fuerte/stacks/knowrob/ias_semantic_map/prolog/ccrl2_semantic_map.pl:27:
Goal (directive) failed: user:owl_parser:owl_parse(/opt/ros/fuerte/stacks/knowrob/ias_semantic_map/owl/ccrl2_semantic_map.owl,false,false,true)
% ccrl2_semantic_map compiled 0.08 sec, 111,808 bytes
% semantic_map_utils compiled into ias_semantic_map 0.00 sec, 8,520 bytes
% /opt/ros/fuerte/stacks/knowrob/ias_semantic_map/prolog/init.pl compiled 0.12 sec, 202,448 bytes
true.
?- probability_given(knowrob:'OmicsLocations', Obj, knowrob:'Kitchen', Pr).
Obj = 'http://ias.cs.tum.edu/kb/knowrob.owl#CitrusFruit',
Pr = 0.003865979381443299 ;
Obj = 'http://ias.cs.tum.edu/kb/knowrob.owl#Bowl-Eating',
Pr = 0.006443298969072165 ;
Obj = 'http://ias.cs.tum.edu/kb/knowrob.owl#PhysicalDevice',
Pr = 0.037371134020618556 .
?- visualisation_canvas(C).
ControlP5 0.5.4 infos, comments, questions at http://www.sojamo.de/libraries/controlP5
PeasyCam v105
lights() is not available with this renderer.
Nov 24, 2012 5:51:33 PM controlP5.ControlWindow init
INFO: You are using renderer processing.core.PGraphics3D.
In order to render controlP5 elements you need to call the ControlP5's draw() manually.
Suggestion is to put controlP5.draw ...
(more) |
| 2014-04-20 06:52:31 -0500 | marked best answer | How KnowRob System Work ?! Hi, This question may seem easy, but I want to clearly develop a plan to my project in the coming period. 1- now I have RoboEarth and KnowRob worked at all :) 2- and I get a cloud point to a cup this cloud points can be converted to an OWL file 3- and I start with knowRob System from KnowRob Wiki. I want to ask ((1)) How to integrate this object cloud points to KnowRob Knowledge base ? ((2)) from where I have to start to define this object properties and other objects that I will work with ?! , I know that this done in Protege OWL editor but,
I have to define object properties, relations with each other, relations with its environment, commonsense knowledge, task action,detection and recognition algorithms Which one I have to do first ?! ((3)) Do I need household_objects_database ?! In sum, How this system work ?!!!
(((4))) That is an object cloud points 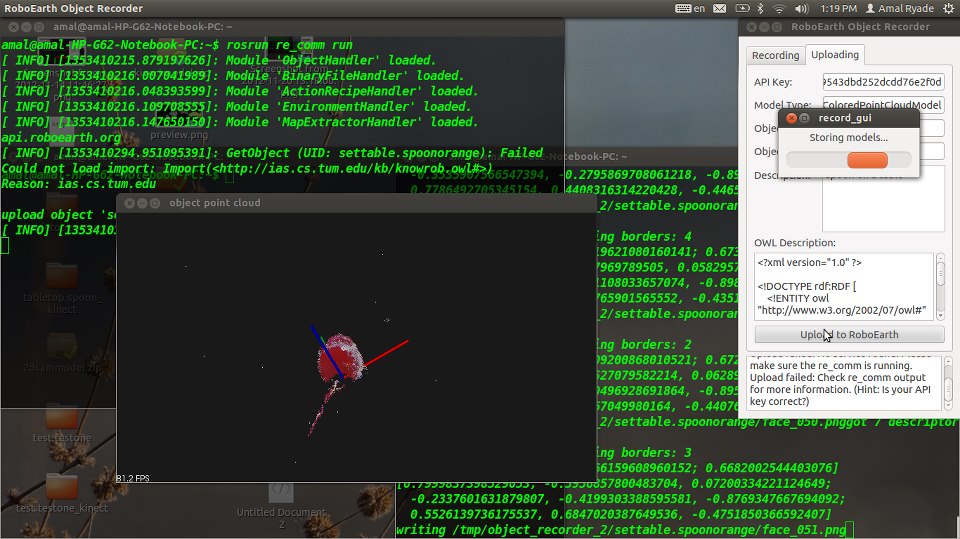 I take it using RoboEarth object recorder, The OWL description is created automatic and There was advice to not edit any thing in it. this owl describe the object I do not understand well but this owl may extend knowrob.owl and roboearth.owl 1- How to load this to knowrob ?! 2- roboearth recorder can not detect this object I found that It can detect only texture objects, and only one object in time. so if I use another package, how to get this OWL description ?! 3- what is the man function of knowrob.owl and roboearth.owl ?! Thanks, |
| 2014-04-20 06:52:31 -0500 | marked best answer | Can not Load CAD model to Visualization Convas hi, It does not want to load cad model into visualization convas, I flow CAD Models Tutorial in KnowRob Wiki
Terminal inside mod_vis ?- register_ros_package(knowrob_cad_models).
% library(knowrob_cad_models) compiled into knowrob_cad_models 0.00 sec, 2,632 bytes
% /opt/ros/fuerte/stacks/knowrob/knowrob_cad_models/prolog/init.pl compiled 0.00 sec, 4,912 bytes
true.
?- owl_has(A, rdf:type, knowrob:'DrinkingBottle'), add_object(A, $C).
false.
|
| 2014-04-20 06:52:28 -0500 | marked best answer | Getting Started with KnowRob Hi,
I was read at Getting Started at KnowRob Wiki
1-I try this command, svn co svn+ssh://svn@svnradig/knowledge/trunk/owl ~/work/owl
actually I do not expect what should the output be
but it seems that I have a problem 2- please any explain to that command parts amal@amal-HP-G62-Notebook-PC:~$ svn co svn+ssh://svn@svnradig/knowledge/trunk/owl ~/work/owl
svn: To better debug SSH connection problems, remove the -q option from 'ssh' in the [tunnels] section of your Subversion configuration file.
svn: Network connection closed unexpectedly
Thanks, |
| 2014-04-20 06:52:27 -0500 | marked best answer | KnowRob development repository. Hi all, Want to Know What is KnowRob development repository ?! |
| 2014-04-20 06:52:21 -0500 | marked best answer | ROS Stacks in home and file system Hi all,
I have a ROS in my home contain RoboEarth and its dependencies and Main ROS [fuerte in Ubuntu 12.04] in file system, I need some stacks from which in my file system so I have to link between all ..
so I use overlay to create my work space and its already in home [fuerte_workspace] how to add RoboEarth and all stacks downloaded with it as once not to add one by one as it does not work
2- that is what I have when try to add ccny_vision
I not add and also ROS in file system still missing
any solution
Thanks in Advance amal@amal-HP-G62-Notebook-PC:~$ cd ~/fuerte_workspace
amal@amal-HP-G62-Notebook-PC:~/fuerte_workspace$ rosws info
WARNING [vcstools] Command failed: 'hg paths default'
run at: '/home/amal/fuerte_workspace/turtlebot'
errcode: 1:
Not trusting file /home/amal/fuerte_workspace/turtlebot/.hg/hgrc from untrusted user root, group root
Not trusting file /home/amal/fuerte_workspace/turtlebot/.hg/hgrc from untrusted user root, group root
not found!
[/vcstools]
workspace: /home/amal/fuerte_workspace
ROS_ROOT: /opt/ros/fuerte/share/ros
Localname S SCM Version-Spec UID (Spec) URI (Spec) [http(s)://...]
--------- - ---- ------------ ----------- ---------------------------
ccny_vision x git robotics.ccny.cuny.edu/git/ccny-ros-pkg/ccny_vision.git
ros x
turtlebot V hg default e47d5a1dca1c (kforge.ros.org/turtlebot/turtlebot)
roboearth svn tags/latest -r2111 ipvs.informatik.uni-stuttgart.de/roboearth/repos/public/
knowrob svn tags/latest -r948 code.in.tum.de/pubsvn/knowrob/
sandbox
/opt/ros/fuerte/stacks
/opt/ros/fuerte/share
/opt/ros/fuerte/share/ros
3-
Now I set up RoboEarth from this rosinstall ~/fuerte_workspace /opt/ros/fuerte 'http://www.ros.org/wiki/roboearth?action=AttachFile&do=get&target=roboearth.rosinstall'
so it is in fuerte_workspace and also on home since previous set up. I have this when run rosmake roboearth , so why does not go in directory of fuerte_workspace ?! amal@amal-HP-G62-Notebook-PC:~$ cd ~/fuerte_workspace
amal@amal-HP-G62-Notebook-PC:~/fuerte_workspace$ rosmake roboearth
[ rosmake ] rosmake starting...
[ rosmake ] Packages requested are: ['roboearth']
[ rosmake ] Logging to directory /home/amal/.ros/rosmake/rosmake_output-20121112-210325
[ rosmake ] Expanded args ['roboearth'] to:
[]
[ rosmake ] WARNING: The following args could not be parsed as stacks or packages: ['roboearth']
[ rosmake ] ERROR: No arguments could be parsed into valid package or stack names.
4- also I have this when try to know the error. amal@amal-HP-G62-Notebook-PC:~/fuerte_workspace$ roswtf
Loaded plugin tf.tfwtf
No package or stack in context
================================================================================
Static checks summary:
Found 1 error(s).
ERROR Not all paths in ROS_PACKAGE_PATH [/opt/ros/fuerte/share:/opt/ros/fuerte/stacks:/home/ros] point to an existing directory:
* /home/ros
5- this is my rosws info amal@amal-HP-G62-Notebook-PC:~$ cd ~/fuerte_workspace
amal@amal-HP-G62-Notebook-PC:~/fuerte_workspace$ rosws info
workspace: /home/amal/fuerte_workspace
ROS_ROOT: /opt/ros/fuerte/share/ros
Localname S SCM Version-Spec UID (Spec) URI (Spec) [http(s)://...]
--------- - ---- ------------ ----------- ---------------------------
stacks/knowrob svn tags/latest -r966 code.in.tum.de/pubsvn/knowrob/
pkgs/tum-ros-pkg/knowledge svn -r1010 tum-ros-pkg.svn.sourceforge.net/svnroot/tum-ros-pkg/knowledge
stacks/ccny_vision git master e03c2bf654d5 robotics.ccny.cuny.edu/git/ccny-ros-pkg/ccny_vision.git
stacks/roboearth svn tags/latest -r2111 ipvs.informatik.uni-stuttgart.de/roboearth/repos/public/
/opt/ros/fuerte ...
(more) |
| 2014-04-20 06:52:20 -0500 | marked best answer | I have a Problem in parsing OWL to Prolog Triples Hi all, (((1)))I do not have more experience in KnowRob, so I now try to run command and see its effects and so on
I was trying to parse Owl file into Prolog so I use this command owl_parse('home/amal/pizza.owl', false, false, true).
I get this error bash: syntax error near unexpected token `'home/amal/pizza.owl','
1- What is the Problem 2- I do not Understand Why false false true in the command ?!
(((2))) It always give me false, I flow this tutorial (Reasoning about objects at knowrob wiki) and also get false, so what is the problem
Terminal: amal@amal-HP-G62-Notebook-PC:~$ roscd knowrob_tutorial
amal@amal-HP-G62-Notebook-PC:~/ros/pkgs/tum-ros-pkg/knowledge/knowrob_tutorial$ rosrun rosprolog rosprolog knowrob_tutorial
% library(swi_hooks) compiled into pce_swi_hooks 0.00 sec, 2,224 bytes
% library(error) compiled into error 0.00 sec, 10,220 bytes
% library(lists) compiled into lists 0.00 sec, 25,320 bytes
% library(shlib) compiled into shlib 0.00 sec, 37,148 bytes
% library(option) compiled into swi_option 0.00 sec, 8,468 bytes
% library(process) compiled into process 0.00 sec, 55,748 bytes
% /opt/ros/fuerte/stacks/knowrob/rosprolog/prolog/init.pl compiled 0.00 sec, 60,268 bytes
% library(jpl) compiled into jpl 0.02 sec, 171,488 bytes
% library(sgml) compiled into sgml 0.01 sec, 25,072 bytes
% library(quintus) compiled into quintus 0.00 sec, 11,676 bytes
% rewrite compiled into rewrite 0.00 sec, 19,736 bytes
% library(uri) compiled into uri 0.00 sec, 8,060 bytes
% library(record) compiled into record 0.00 sec, 19,532 bytes
% rdf_parser compiled into rdf_parser 0.01 sec, 87,476 bytes
% library(gensym) compiled into gensym 0.00 sec, 2,580 bytes
% rdf_triple compiled into rdf_triple 0.00 sec, 22,132 bytes
% library(rdf) compiled into rdf 0.02 sec, 154,404 bytes
% library(debug) compiled into prolog_debug 0.01 sec, 12,180 bytes
% library(assoc) compiled into assoc 0.00 sec, 19,484 bytes
% library(sgml_write) compiled into sgml_write 0.01 sec, 68,120 bytes
% library(nb_set) compiled into nb_set 0.00 sec, 3,400 bytes
% library(utf8) compiled into utf8 0.00 sec, 7,108 bytes
% library(url) compiled into url 0.01 sec, 63,416 bytes
% rdf_cache compiled into rdf_cache 0.01 sec, 9,016 bytes
% library(semweb/rdf_db) compiled into rdf_db 0.05 sec, 398,008 bytes
% comp_similarity compiled into comp_similarity 0.06 sec, 414,548 bytes
% /opt/ros/fuerte/stacks/knowrob/ias_prolog_addons/prolog/init.pl compiled 0.06 sec, 415,236 bytes
% library(broadcast) compiled into broadcast 0.00 sec, 4,156 bytes
% library(semweb/rdf_edit) compiled into rdf_edit 0.01 sec, 48,796 bytes
% library(semweb/rdfs) compiled into rdfs 0.00 sec, 14,256 bytes
% library(semweb/owl) compiled into t20_owl 0.01 sec, 37,936 bytes
% library(socket) compiled into socket 0.00 sec, 7,060 bytes
% library(base64) compiled into base64 0.00 sec, 9,640 bytes
% library(http/http_open.pl) compiled into http_open 0.01 ...
(more) |

 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}