The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-09-15 06:09:56 -0500 | received badge | ● Famous Question (source) |
| 2021-04-12 08:15:18 -0500 | received badge | ● Famous Question (source) |
| 2021-04-12 08:15:18 -0500 | received badge | ● Notable Question (source) |
| 2020-12-18 13:29:29 -0500 | marked best answer | IMU plugin has strange measurements in RViz My robot has an IMU attached to its arm. The following URDF xacro macro is defining the IMU: But when I attach it to my robot, the outputs of the IMU are wrong. The resulting direction of the linear acceleration does not make sense to me. As the robot is stationary in this moment, I expect the acceleration to be in z direction -9.81 and zero otherwise. One thing that makes me think is the frame of the IMU measurement. I want to have it in world coordinates, not in the kinova_link_6 (which is just the last link of the robot). Does anyone see a mistake in my URDF that could fix this problem? Thanks a lot! edit: I added |
| 2019-12-11 08:44:58 -0500 | received badge | ● Famous Question (source) |
| 2019-10-07 02:37:03 -0500 | received badge | ● Popular Question (source) |
| 2019-09-18 05:00:26 -0500 | received badge | ● Notable Question (source) |
| 2019-08-26 06:25:28 -0500 | received badge | ● Popular Question (source) |
| 2019-07-15 06:29:43 -0500 | received badge | ● Rapid Responder (source) |
| 2019-07-15 06:29:43 -0500 | answered a question | IMU plugin has strange measurements in RViz So I solved it by myself. Even though it's kind of a hack. The problem actually did not occur in the shown URDF above bu |
| 2019-07-15 03:34:35 -0500 | edited question | IMU plugin has strange measurements in RViz IMU plugin has strange measurements in RViz My robot has an IMU attached to its arm. The following URDF xacro macro is |
| 2019-07-15 03:15:21 -0500 | edited question | IMU plugin has strange measurements in RViz IMU plugin has strange measurements in RViz My robot has an IMU attached to its arm. The following URDF xacro macro is |
| 2019-07-15 03:15:05 -0500 | edited question | IMU plugin has strange measurements in RViz IMU plugin has strange measurements in RViz My robot has an IMU attached to its arm. The following URDF xacro macro is |
| 2019-07-15 03:14:38 -0500 | edited question | IMU plugin has strange measurements in RViz IMU plugin has strange measurements in RViz My robot has an IMU attached to its arm. The following URDF xacro macro is |
| 2019-07-15 03:13:30 -0500 | edited question | IMU plugin has strange measurements in RViz IMU plugin has strange measurements in RViz My robot has an IMU attached to its arm. The following URDF xacro macro is |
| 2019-07-15 03:10:02 -0500 | edited question | IMU plugin has strange measurements in RViz IMU plugin has strange measurements in RViz My robot has an IMU attached to its arm. The following URDF xacro macro is |
| 2019-07-15 03:10:02 -0500 | received badge | ● Editor (source) |
| 2019-07-15 02:59:14 -0500 | asked a question | IMU plugin has strange measurements in RViz IMU plugin has strange measurements in RViz My robot has an IMU attached to its arm. The following URDF xacro macro is |
| 2019-06-19 06:10:52 -0500 | commented answer | What is a good way of storing robot paths and access them? Thanks. I really found a bug in my code now that fixed the problem. I gave up after multiple days of debugging but took |
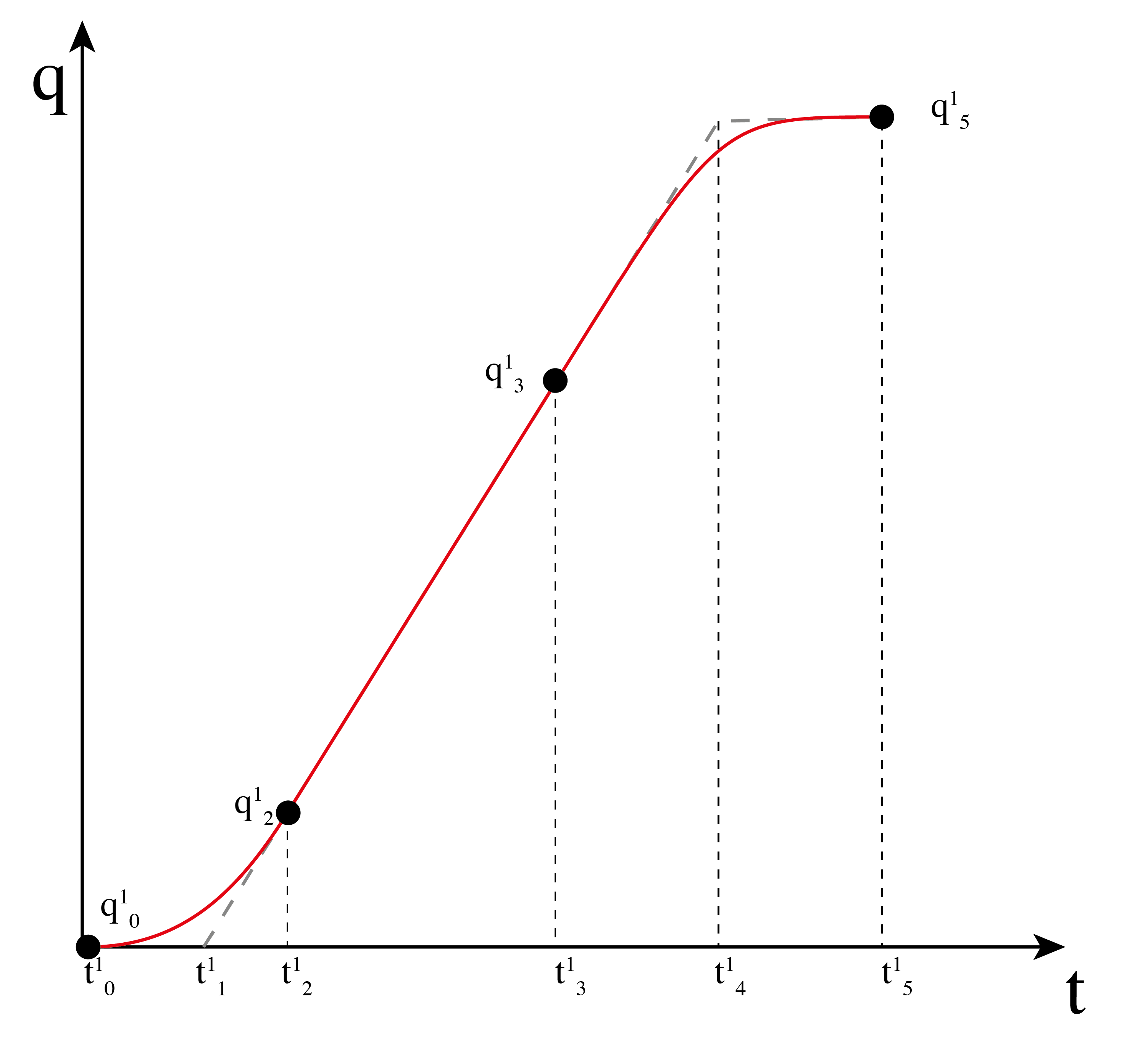
| 2019-06-19 06:05:15 -0500 | marked best answer | What is a good way of storing robot paths and access them? Hi guys I am writing a controller for a 6DOF robot arm. I am generating paths for the robot to come from the starting point to a desired pose. To do this I do a piecewise polynomial interpolation. Meaning that I first easily interpolate linearly over time between the two points. And then I attach a 6-degree polynomial in the beginning and the end to smoothen the motion. It looks then as follows:
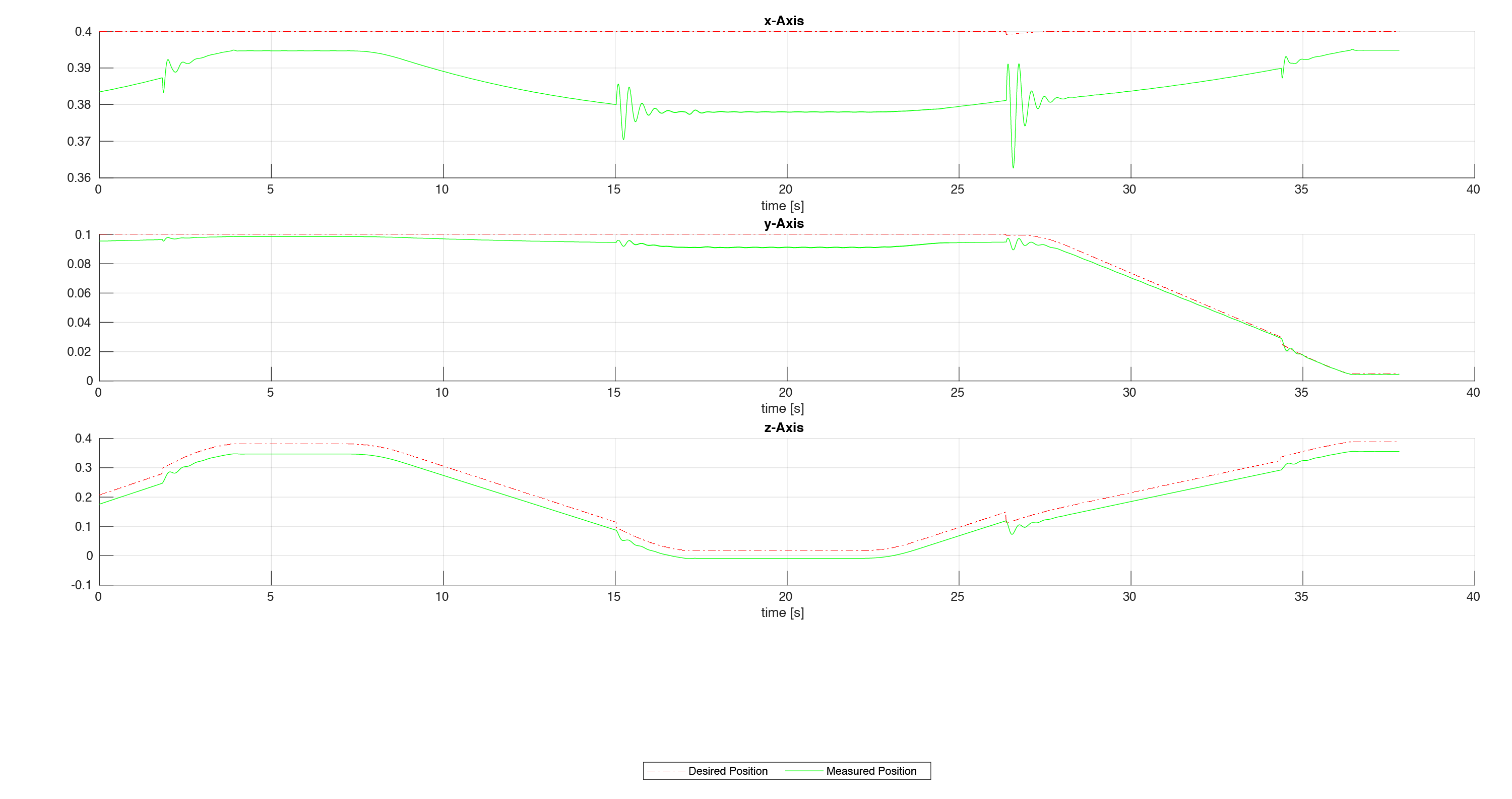
Now I have the problem, that because of numerical issues (at least I think so) or because of time discretization, I got small jumps between the different polynoms:
My idea is now to just filter the paths to get rid of these jumps. For this I need to store the path somehow that I can filter it but I don't really have an idea what is a good way of doing this. How are paths saved for example in MoveIt? Do they save discrete or continuous paths? Is there a way of connecting my polynoms to make it "filterable"? Thanks for your help! |
| 2019-06-19 06:05:15 -0500 | received badge | ● Scholar (source) |
| 2019-06-19 06:05:10 -0500 | received badge | ● Supporter (source) |
| 2019-06-19 06:05:02 -0500 | received badge | ● Notable Question (source) |
| 2019-06-18 10:25:53 -0500 | received badge | ● Popular Question (source) |
| 2019-06-18 09:41:27 -0500 | commented question | What is a good way of storing robot paths and access them? Yes of course. When I posted the question this morning I did not have enough karma yet. Updated my question accordingly. |
| 2019-06-18 09:40:57 -0500 | commented question | What is a good way of storing robot paths and access them? Yes of course. When I posted the question this morning I did not have enough karma yet. |
| 2019-06-18 09:40:38 -0500 | edited question | What is a good way of storing robot paths and access them? What is a good way of storing robot paths and access them? Hi guys I am writing a controller for a 6DOF robot arm. I am |
| 2019-06-18 09:39:46 -0500 | commented question | What is a good way of storing robot paths and access them? Hi, yes of course. When I posted the question this morning I did not have enough karma yet. |
| 2019-06-18 09:38:51 -0500 | commented answer | ROS2 IDE integration? I actually never tried this. I still like to have the terminal open to launch my nodes. I found the option "create comma |
| 2019-06-18 09:04:09 -0500 | received badge | ● Nice Answer (source) |
| 2019-06-18 08:31:03 -0500 | received badge | ● Teacher (source) |
| 2019-06-18 01:49:10 -0500 | answered a question | ROS2 IDE integration? I also use CLion and had a hard time to start with it. But it works perfect like this: Source your workspace Start CL |
| 2019-06-18 01:49:10 -0500 | received badge | ● Rapid Responder (source) |
| 2019-06-18 01:39:51 -0500 | asked a question | What is a good way of storing robot paths and access them? What is a good way of storing robot paths and access them? Hi guys I am writing a controller for a 6DOF robot arm. I am |
| 2019-05-10 04:14:40 -0500 | received badge | ● Enthusiast |
| 2019-04-30 09:48:20 -0500 | asked a question | Adding camera using Xacro Adding camera using Xacro Hi I want to attach a fixed camera on my robot base in Gazebo and RViz and there are two pro |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.