The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-01-22 06:02:02 -0500 | received badge | ● Famous Question (source) |
| 2019-11-01 22:24:25 -0500 | received badge | ● Notable Question (source) |
| 2019-06-04 12:47:47 -0500 | received badge | ● Famous Question (source) |
| 2018-10-25 04:34:05 -0500 | received badge | ● Famous Question (source) |
| 2018-10-25 00:43:55 -0500 | received badge | ● Famous Question (source) |
| 2018-10-24 05:06:13 -0500 | received badge | ● Student (source) |
| 2018-10-05 18:32:26 -0500 | received badge | ● Taxonomist |
| 2018-09-20 07:55:02 -0500 | received badge | ● Famous Question (source) |
| 2018-06-13 04:41:01 -0500 | commented answer | Continuous robot arm movement @jayess I have posted the new code |
| 2018-06-13 04:40:29 -0500 | edited answer | Continuous robot arm movement Well, the continuous movement I wanted, was achieved. There were some changes to be done in the code and it was accompli |
| 2018-06-13 04:40:00 -0500 | edited answer | Continuous robot arm movement Well, the continuous movement I wanted, was achieved. There were some changes to be done in the code and it was accompli |
| 2018-06-12 16:59:27 -0500 | answered a question | Continuous robot arm movement Well, the continuous movement I wanted, was achieved. There were some changes to be done in the code and it was accompli |
| 2018-06-09 11:04:19 -0500 | commented answer | Continuous robot arm movement @AndyZe I actually have the gazebo simulation ready and I can see it work |
| 2018-06-09 07:32:46 -0500 | commented answer | Continuous robot arm movement @gvdhoorn right now my focus is just the simulation of the bot. That's why I wanted to be sure. I shall look up gazebo_r |
| 2018-06-09 04:24:01 -0500 | received badge | ● Famous Question (source) |
| 2018-06-09 04:22:55 -0500 | commented answer | Continuous robot arm movement @gvdhoorn correct me if I am wrong, for applying `jog_arm, I need the drivers of the arm I am controlling? If yes, are t |
| 2018-06-06 21:23:29 -0500 | received badge | ● Famous Question (source) |
| 2018-06-05 07:22:56 -0500 | received badge | ● Notable Question (source) |
| 2018-06-04 20:16:13 -0500 | received badge | ● Notable Question (source) |
| 2018-06-04 19:56:40 -0500 | received badge | ● Popular Question (source) |
| 2018-06-04 16:15:00 -0500 | commented question | Continuous robot arm movement @PeteBlackerThe3rd hey, as suggested by you, I have created a new question here |
| 2018-06-04 16:14:03 -0500 | asked a question | Continuous robot arm movement Continuous robot arm movement Unlike edge triggered here ,I am now trying to move the arm continuously till the buttons |
| 2018-06-04 16:11:56 -0500 | edited question | XBox button debouncing XBox button debouncing Hey, I want to implement button debouncing for my xbox controller and I couldn't find anything m |
| 2018-06-04 14:18:22 -0500 | received badge | ● Notable Question (source) |
| 2018-06-04 12:40:39 -0500 | commented answer | XBox button debouncing @PeteBlackerThe3rd Hey, could you kindly check the Edit-3. I am trying something different and am facing a bit of a prob |
| 2018-06-04 12:40:29 -0500 | commented answer | XBox button debouncing @PeteBlackerThe3rdHey, could you kindly check the Edit-3. I am trying something different and am facing a bit of a probl |
| 2018-06-04 12:39:19 -0500 | edited question | XBox button debouncing XBox button debouncing Hey, I want to implement button debouncing for my xbox controller and I couldn't find anything m |
| 2018-06-04 12:24:14 -0500 | marked best answer | moveit_commander_cmdline.py Error Hey, I was going through the Could anyone guide me as to what this error means? Thanks |
| 2018-06-04 10:22:36 -0500 | commented answer | moveit_commander_cmdline.py Error Thanks, the fix worked |
| 2018-06-01 09:59:12 -0500 | received badge | ● Popular Question (source) |
| 2018-05-31 07:11:01 -0500 | asked a question | moveit_commander_cmdline.py Error moveit_commander_cmdline.py Error Hey, I was going through the Moveit tutorials here: Moveit Commander Scripting and wh |
| 2018-05-31 05:33:08 -0500 | received badge | ● Famous Question (source) |
| 2018-05-29 09:48:59 -0500 | commented answer | XBox button debouncing Oh damn. Yes, you're right. Thanks for the help. I will apply asyncExecute too and try the same. Thanks again. |
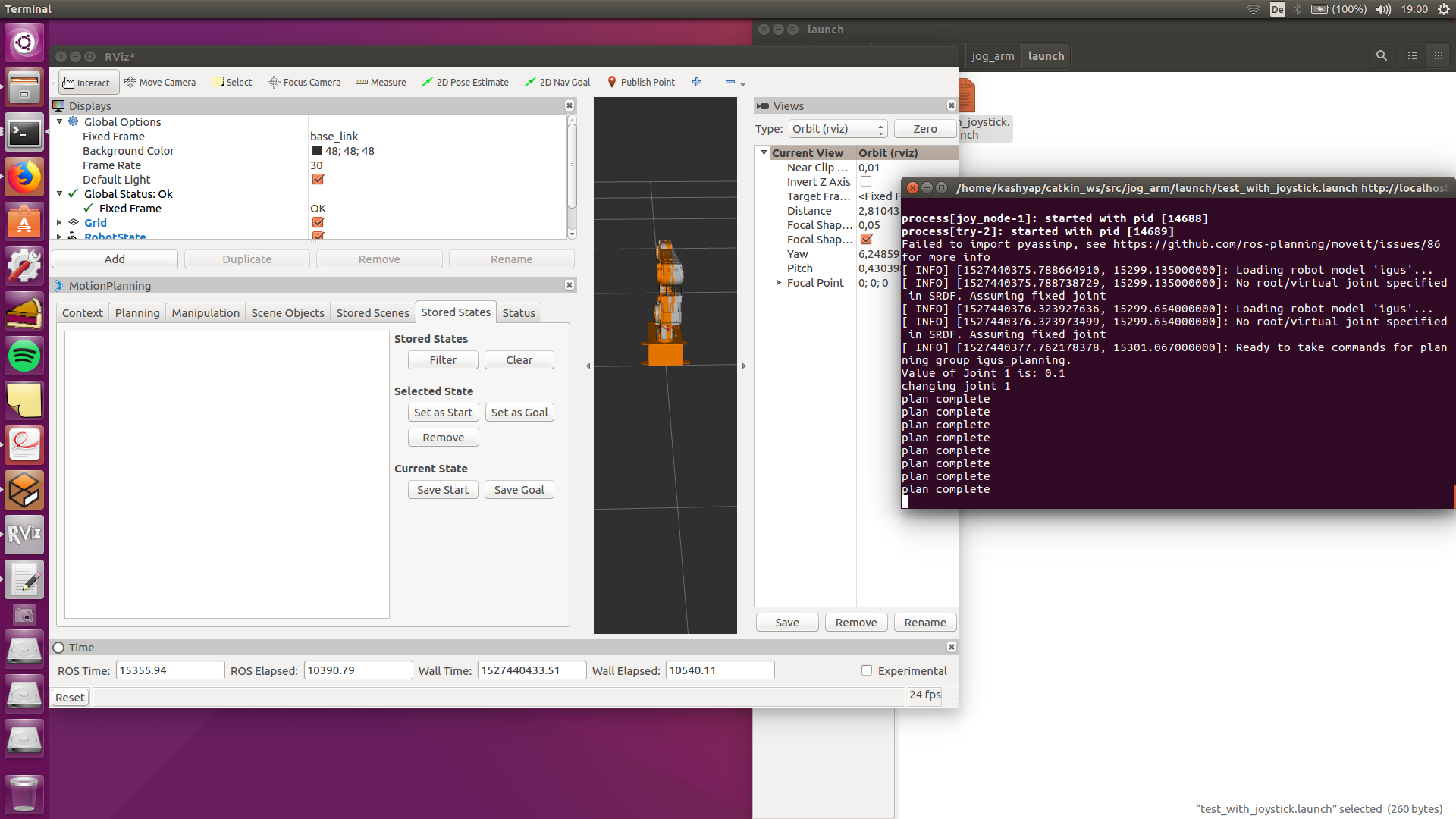
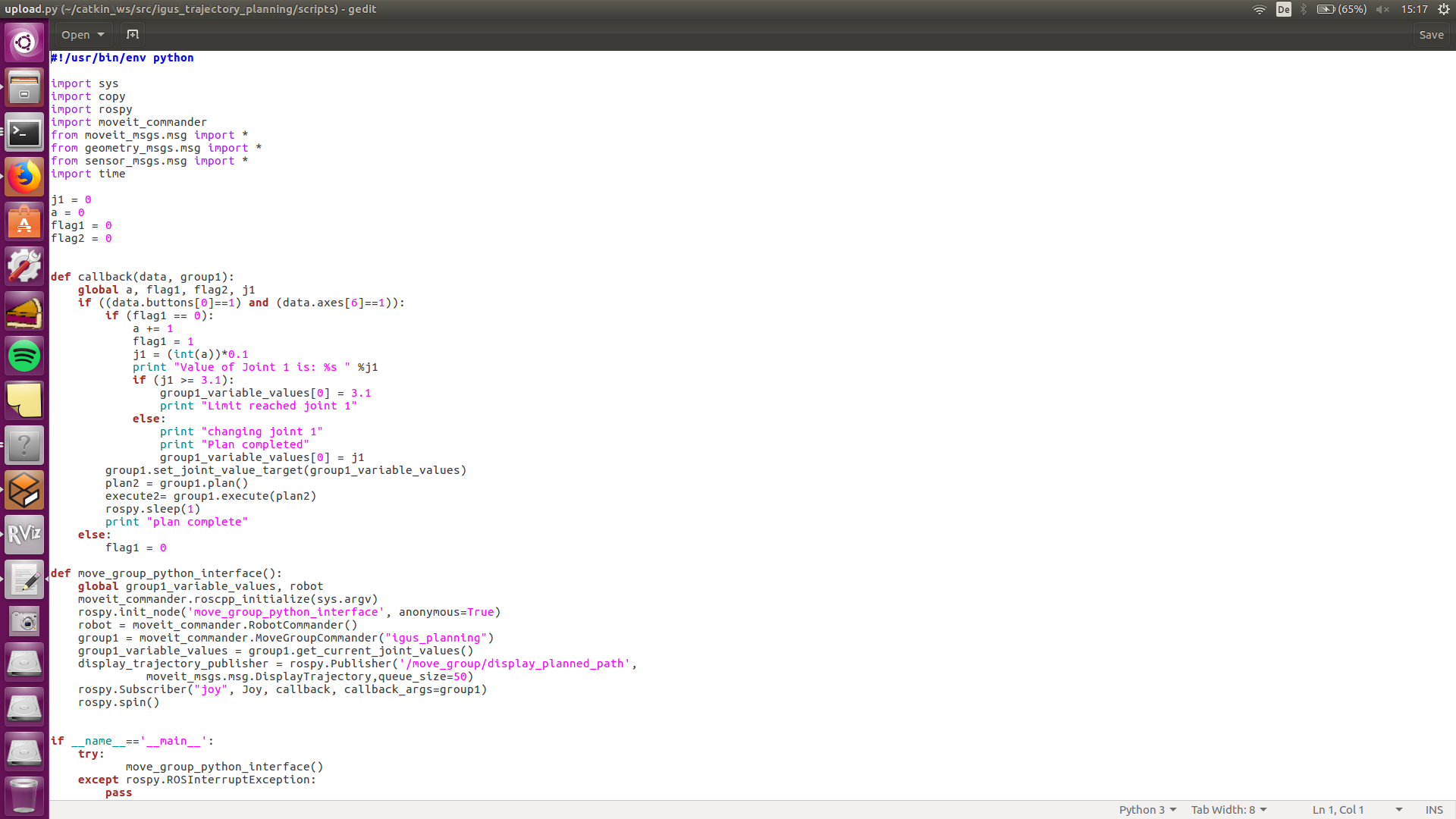
| 2018-05-29 09:47:38 -0500 | marked best answer | XBox button debouncing Hey, I want to implement button debouncing for my xbox controller and I couldn't find anything much helpful till now. All the info that is available on google is related to microcontrollers. Is there an option or a way button debouncing can be implemented in a ros python code? Thanks in advance Edit: @PeteBlackerThe3rd In the pic you can see that the joint changed once, when I gave the input through the controller, but instead of stopping at the first 'Plan complete', the loop ran for 7 more times, which causes a bit of delay in processing the second instruction given through the controller. Could you maybe point out my mistake or maybe guide me through the right process so that I can detect my mistake? Edit-2 Code screenshot: I know it's not suggested to take a screen shot of the code and post it here, but I just wanted to make sure that the indentations I am having in my code are clear, since indentations are a not always correct here
Edit -2 This is my code |
| 2018-05-29 08:23:58 -0500 | commented answer | XBox button debouncing @PeteBlackerThe3rd Hey, thanks for the observation. I have updated both the code and the sceen shot of the code above un |
| 2018-05-29 08:22:32 -0500 | edited question | XBox button debouncing XBox button debouncing Hey, I want to implement button debouncing for my xbox controller and I couldn't find anything m |
| 2018-05-28 04:24:48 -0500 | received badge | ● Notable Question (source) |
| 2018-05-27 12:51:08 -0500 | received badge | ● Famous Question (source) |
| 2018-05-27 12:48:37 -0500 | edited question | XBox button debouncing XBox button debouncing Hey, I want to implement button debouncing for my xbox controller and I couldn't find anything m |
| 2018-05-27 12:45:04 -0500 | received badge | ● Popular Question (source) |
| 2018-05-27 12:37:32 -0500 | commented answer | XBox button debouncing The indentation is there. Everything is with in the if (flag1 == 0): loop. I did correct the indentation below. Maybe yo |
| 2018-05-27 12:22:51 -0500 | edited answer | XBox button debouncing C:\fakepath\Screenshot from 2018-05-27 19-00-33.png @PeteBlackerThe3rd In the pic you can see that the joint changed on |
| 2018-05-27 12:21:17 -0500 | edited answer | XBox button debouncing C:\fakepath\Screenshot from 2018-05-27 19-00-33.png @PeteBlackerThe3rd In the pic you can see that the joint changed on |
| 2018-05-27 12:19:34 -0500 | commented answer | XBox button debouncing I edited my previous comment with the code, and you actually did suggest me the edge triggering before and I did apply i |
| 2018-05-27 12:18:23 -0500 | edited answer | XBox button debouncing C:\fakepath\Screenshot from 2018-05-27 19-00-33.png @PeteBlackerThe3rd In the pic you can see that the joint changed on |
| 2018-05-27 12:06:39 -0500 | answered a question | XBox button debouncing C:\fakepath\Screenshot from 2018-05-27 19-00-33.png @PeteBlackerThe3rd In the pic you can see that the joint changed on |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.