The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
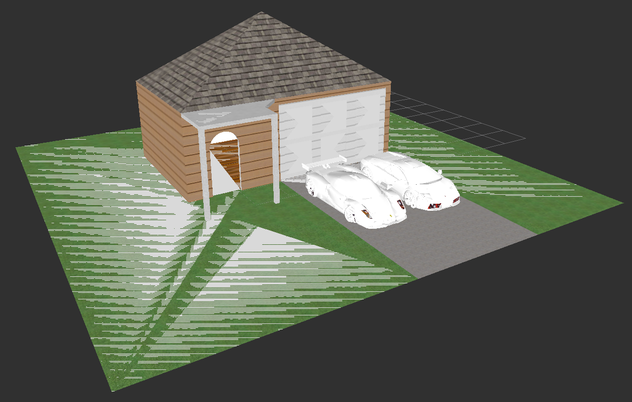
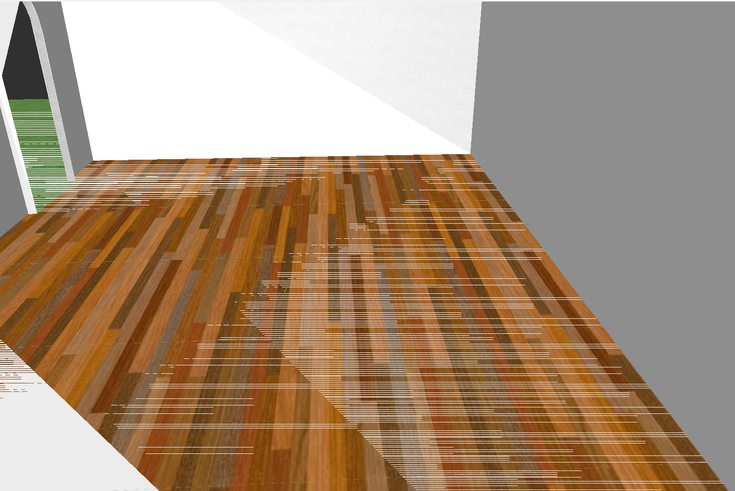
| 2017-11-30 10:28:09 -0500 | marked best answer | artifacts when visualizing mesh with librviz I'm working on a project in which we are trying to visualize large meshes with textures in a custom written app that uses librviz. When loading collada files that were downloaded from 3D Warehouse, we notice a few bad things that happen when visualizing them. Specifically, we experienced two problems when visualizing this mesh:
I've seen the very impressive gazebo worlds that the folks at OSRF made for the DRC, so I would bet it's either a problem in rviz that doesn't exist in gazebo OR I'm doing something wrong. Any advice on how to make the meshes visualize properly from ALL perspectives and to make all of the textures load would be much appreciated. (Please note that I really don't know much about 3D graphics in general.....so I use the term "artifacts" here because I hear people using it to describe a whole bunch of crap that happens when working with meshes. Please tell me if there is a real term that describes what we're seeing...)
|
| 2015-08-20 11:32:51 -0500 | received badge | ● Good Answer (source) |
| 2014-12-11 04:14:19 -0500 | received badge | ● Nice Answer (source) |
| 2014-02-03 16:09:57 -0500 | commented answer | How do I convert a mesh to a pointcloud for use with pcl ICP Does this conversion sample points on the surfaces or strictly converts the vertices in the STL file into points in the point cloud? If not, is there any tool out that does sample points on the surfaces? |
| 2014-01-28 17:28:57 -0500 | marked best answer | tool to remove points from point cloud I was wondering if there is an interactive-marker based tool available that I can use to remove points from a pointcloud or pointcloud2 by clicking on them or highlighting a set of points. Then when the desired pointcloud remains, you can press a key that writes a PCD file. As far as I know, I don't think it would be too hard to write but I'm hoping that it's already available in the object-modeling community. I can see it as a part of the tool chain after you use roboearth to make the model. If there is no such tool, I would appreciate any advise on quickly cleaning up a PCD file other than just writing a quick program to delete points within a bounding box (guess and check...). Thanks! (By the way - if this doesn't exist for point clouds, maybe it exists for other 3D data types such as octomaps? In general, maybe we need a tool that can do this for pointcloud, pointcloud2, octomap, laser scan etc.) |
| 2014-01-28 17:26:33 -0500 | marked best answer | performance comparison of math libraries I was wondering if anyone has benchmarked the performance of the commonly used math libraries in the ROS community such as the KDL, Bullet & Eigen. In my work, I have to do hundreds of thousands of rotations & transformations at run time and right now I'm primarily using the KDL but I never looked into the performance of the individual libraries to determine if one is much faster or much slower than the others. In a quick search on ros.org, I found a couple of pages, MathLibraries & RotationMethods, that discuss the libraries but don't offer a performance comparison. If someone has any insight into this topic, I'll post it on the MathLibraries page. Should I assume that all of these libraries have comparable performance? If no one responds, then I'll just do some simple benchmarking of my own and post the results. |
| 2014-01-28 17:24:47 -0500 | marked best answer | localizing multiple ARMarkers using ar_pose I have some general questions about ARMarkers and also the ROS wrapper, ar_pose. I searched for general information on using them in practice but couldn't find any detailed information.
My goal is to put markers on 25 dishes or so on a tabletop and some shelves. The camera won't ever be more than 6ft away. Is that doable? Any tips or lessons learned from experience would be appreciated. Thank you very much in advance! |
| 2014-01-28 17:22:50 -0500 | marked best answer | down sample camera image on driver or image_proc level In addition to producing higher resolution images than the wge100 cameras, the PR2's Prosilica also puts out images with much better color quality. In the perfect world, I would have a camera on the PR2 that can spew out images at the same frame rate of the wge100 cameras but with the image quality of the Prosilica. I was wondering if there is a way to down sample the images from the Prosilica camera on the driver level or at least have it done by the image_proc node. We obviously down sample the received images in code but we are getting them at 2fps and would like to get them at a faster frame rate and at a lower resolution. If the images were to be down sampled by the driver or by the image_proc node, maybe the travel time would be shorter and we would get a faster frame rate? I don't actually know how fast the camera can spit out images. Just to be clear, I know that you can crop the images using dynamic_reconfigure but I'm wondering whether it can down sample the entire image somehow. I'm a vision noob so I think this is probably feasible - I just don't know how to do it. |
| 2014-01-28 17:22:49 -0500 | marked best answer | prosilica calibration freezes during calibration step I don't have any experience calibrating the prosilica camera on the PR2. I followed this tutorial but the calibration process tends to freeze up on me. Setup:
What I did:
What am I doing wrong? Am I not waiting long enough? |
| 2014-01-28 17:22:41 -0500 | marked best answer | edit logger levels programmatically or from the command line I searched around on this site, the roscpp/logging page and on the rosconsole wiki page but as far as I can tell there are two obvious ways of changing the logger level and they are:
Now, I just found this page, and it told me that using roscpp I can programmatically change the logger level as in rosconsole/examples/example.cpp. So, in writing this question I figured out half of my question but I thought I might as well ask this anyway: Is there a way to modify the logger level from the command line? Something along the lines of: ex. "roslog sbpl DEBUG" or "roslog sbpl/my_log DEBUG" Regarding, changing the logger level programmatically, I'll follow the example code and post any questions here if it doesn't work as expected. |
| 2014-01-28 17:22:08 -0500 | marked best answer | how to programmatically add/remove displays in rviz I was wondering if there is a way to programmatically add and remove Displays in rviz? I would think that if the feature existed it would come in the form of a topic or service that a node can publish to or call to add or remove a Display of a certain DisplayType. |
| 2014-01-28 17:21:50 -0500 | marked best answer | retrieve raw IR image from Kinect Is there anyway to retrieve the raw IR image using the openni_kinect stack? Any other stack? I'm pretty sure the old kinect calibration that was part of a different stack and that used a different driver published the raw IR image but it seems like the old calibration tutorial was taken down. |
| 2014-01-28 17:21:50 -0500 | marked best answer | pre-release test error on hudson I'm using the fancy code release system for the first time and it seems to be very impressive how everything gets auto-magically generated for you however I ran into a problem last week when I tried a pre-release test. I should mention that I'm the repository maintainer and so I first followed the Repository Setup Instructions - so just bear in mind that the problem may not be with the stack itself but maybe it's a problem with the entire repo configuration in the rosdistro. I tried to run a Hudson Pre-Release test and I got the following error in Diamiondback and Unstable on all of the platforms. It doesn't seem like it even got up compiling code so I don't know where to start debugging the problem...
You can also check out the entire hudson console output. Does anyone know how I can resolve this problem? Thanks in advance. |
| 2014-01-28 17:21:47 -0500 | marked best answer | how to change the svn URL on a package/stack wiki page I wrote some documentation on the ros.org/wiki page of a stack and some packages that I created. I can't seem to figure out how to change the autogenerated 'Source:' URL that pops up at the top of the page. Right now it's pointing to trunk but I want it to point to a released version in the tags folder instead. I've noticed for a while that many official WG stacks and packages have the svn URL of trunk not of a tagged release. Why is that? I'm assuming the wiki autogenerator uses the path to the highest level package in the ROS_PACKAGE_PATH with that package name - that would put the code in trunk above a released folder in tags...but this is just a theory. How can I change the svn URL to a tagged release?
|
| 2014-01-28 17:21:40 -0500 | marked best answer | log4cxx error on node shutdown in diamondback rc3 I installed diamondback RC3 yesterday on a machine that was upgraded from Ubuntu 9.04 to 10.04 over the weekend. (Maybe upgrading instead of a fresh install was a bad idea?) log4cxx seems to be having a problem. Every time I ctrl+c a launch file that I ran, I get an error that looks like this: or Is log4cxx set up incorrectly? Has anyone seen this before? |
| 2014-01-28 17:21:38 -0500 | marked best answer | How to programmatically reset Gazebo Students in the class I'm TAing are wondering if there is a way to programmatically reset the Gazebo simulation so they can debug their projects faster. I could benefit from this too :). A couple of them said that they looked through the documentation and couldn't find anything in the Gazebo API. Is it possible to programmatically reset a Gazebo simulation? thanks, --ben |
| 2014-01-28 17:21:38 -0500 | marked best answer | retrieve the bounding box of a mesh Before I venture into figuring out how to make a bounding box of a mesh from a .mesh file or .stl file, I thought I would ask on this forum if the following has already been done somewhere in ros-pkgs:
Maybe I'm just being lazy but I feel like it must have been done somewhere. thanks, ben |
| 2014-01-21 08:35:13 -0500 | commented answer | change sbpl_lattice_planner preference to reverse motion? Within the last 6 months, we posted more tutorials on the sbpl website that you might find useful. Here's a really good one written by Victor Hwang - with really good pictures. It describes how to generate motion prims: http://sbpl.net/node/52 |
| 2014-01-14 22:42:29 -0500 | received badge | ● Famous Question (source) |
| 2013-11-22 00:27:10 -0500 | commented answer | Create a ROS.org Wiki Mirror The newest tarball seems to be missing images(other files?) that were contained in previous tarballs. Is this a planned change? It seems like it is definitely missing the ROS logo & the little globe icon next to links. The most recent tarball (without docs): http://mediabox.grasp.upenn.edu/roswiki/ |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.