The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-05-26 07:34:43 -0500 | received badge | ● Famous Question (source) |
| 2023-05-15 04:27:32 -0500 | received badge | ● Famous Question (source) |
| 2023-05-08 05:35:14 -0500 | received badge | ● Famous Question (source) |
| 2023-03-09 08:45:34 -0500 | received badge | ● Notable Question (source) |
| 2023-03-09 08:33:35 -0500 | received badge | ● Popular Question (source) |
| 2023-01-27 20:06:53 -0500 | received badge | ● Notable Question (source) |
| 2023-01-16 20:10:39 -0500 | received badge | ● Popular Question (source) |
| 2023-01-15 07:26:04 -0500 | commented answer | Navigation stack with GPS and without wheel encoders Tha's a good one. The odom->base ekf could use cmd_vel control output together with the IMU. I'll give it a try. Than |
| 2023-01-15 07:25:41 -0500 | commented answer | Navigation stack with GPS and without wheel encoders Tha's a good one. The odom->base ekf could use cmd_vel control output. I'll give it a try. Thank |
| 2023-01-15 07:24:14 -0500 | edited question | Navigation stack with GPS and without wheel encoders Navigation stack with GPS and without wheel encoders Hi, I was working with navigation stack on a rover. It was equiped |
| 2023-01-15 07:21:07 -0500 | received badge | ● Famous Question (source) |
| 2023-01-14 20:31:28 -0500 | received badge | ● Notable Question (source) |
| 2023-01-14 07:35:02 -0500 | edited question | Navigation stack with GPS and without wheel encoders Navigation stack with GPS and without wheel encoders Hi, I was working with navigation stack on a rover. It was equiped |
| 2023-01-14 07:33:59 -0500 | asked a question | Navigation stack with GPS and without wheel encoders Navigation stack with GPS and without wheel encoders Hi, I was working with navigation stack on a rover. It was equiped |
| 2022-11-24 20:03:25 -0500 | received badge | ● Notable Question (source) |
| 2022-11-24 20:03:25 -0500 | received badge | ● Popular Question (source) |
| 2022-11-10 02:09:37 -0500 | marked best answer | publish camera_info and undistort image Hi, I'm using a node on en jetson nano running melodic, that publish Image topics. I will calibrate the camera with cameracalibration.py in order to get calibration yaml file. Then I will need to undistort (rectifie?) the image using data from yaml file. Is there a package, node, tool that read a yaml file, subscribe to image topic and publish camera_info and undistorted images? Thank |
| 2022-11-10 02:09:34 -0500 | received badge | ● Famous Question (source) |
| 2022-10-31 02:22:15 -0500 | received badge | ● Notable Question (source) |
| 2022-10-17 20:12:45 -0500 | received badge | ● Popular Question (source) |
| 2022-10-16 20:55:41 -0500 | received badge | ● Famous Question (source) |
| 2022-09-25 18:26:16 -0500 | received badge | ● Popular Question (source) |
| 2022-09-20 10:55:59 -0500 | commented answer | Is there a way to use a GPS message to set computer date and time that's exactly what I'm looking for. Thanks |
| 2022-09-20 10:55:42 -0500 | marked best answer | Is there a way to use a GPS message to set computer date and time I'm working on a robot with a GPS and an OBC. I need to set up the date/time of the OBC each time it boots. I would like to use the GPS ros driver/navsatfix message to do that. Is there a package or a node to do that? |
| 2022-09-19 15:31:57 -0500 | asked a question | robot_localization slowly converge to correct position robot_localization slowly converge to correct position Hi, I have a robot with wheel encoders, RTK GPS and an IMU (with |
| 2022-09-17 12:41:34 -0500 | asked a question | Is there a way to use a GPS message to set computer date and time Is there a way to use a GPS message to set computer date and time I'm working on a robot with a GPS and an OBC. I need t |
| 2022-09-17 12:37:09 -0500 | answered a question | understanding dual ekf outputs in robot_localization Never mind. The filter was not using gps data because the timestamps of NavSat messages were in the future wrt to the ro |
| 2022-09-17 12:37:09 -0500 | received badge | ● Rapid Responder (source) |
| 2022-09-17 11:04:00 -0500 | edited question | understanding dual ekf outputs in robot_localization understanding dual ekf outputs in robot_localization Hi, I have a robot with wheel encoders, RTK GPS and an IMU (with ma |
| 2022-09-17 08:11:25 -0500 | asked a question | understanding dual ekf outputs in robot_localization understanding dual ekf outputs in robot_localization Hi, I have a robot with wheel encoders, RTK GPS and an IMU (with ma |
| 2022-09-16 11:25:58 -0500 | received badge | ● Popular Question (source) |
| 2022-09-14 12:59:20 -0500 | asked a question | Covariance is growing unbounded in robot_localization covarince grow in robot_localization Hi, I'm building a custom robot (3 wheel, differential drive). It has an IMU, repor |
| 2022-09-14 12:31:20 -0500 | asked a question | how to echo utm coordinate in robot_localization how to echo utm coordinate in robot_localization Hi, is there a way to echo the UTM coordinate of the robot used by robo |
| 2022-08-04 15:26:20 -0500 | received badge | ● Notable Question (source) |
| 2022-07-16 16:23:42 -0500 | received badge | ● Famous Question (source) |
| 2022-07-16 16:18:26 -0500 | received badge | ● Popular Question (source) |
| 2022-07-06 15:57:22 -0500 | asked a question | origin of navigation stack map and robot localization origin of navigation stack map and robot localization Hi, I'm using robot_localization (two instances plus navsat_transf |
| 2022-01-27 03:55:06 -0500 | received badge | ● Famous Question (source) |
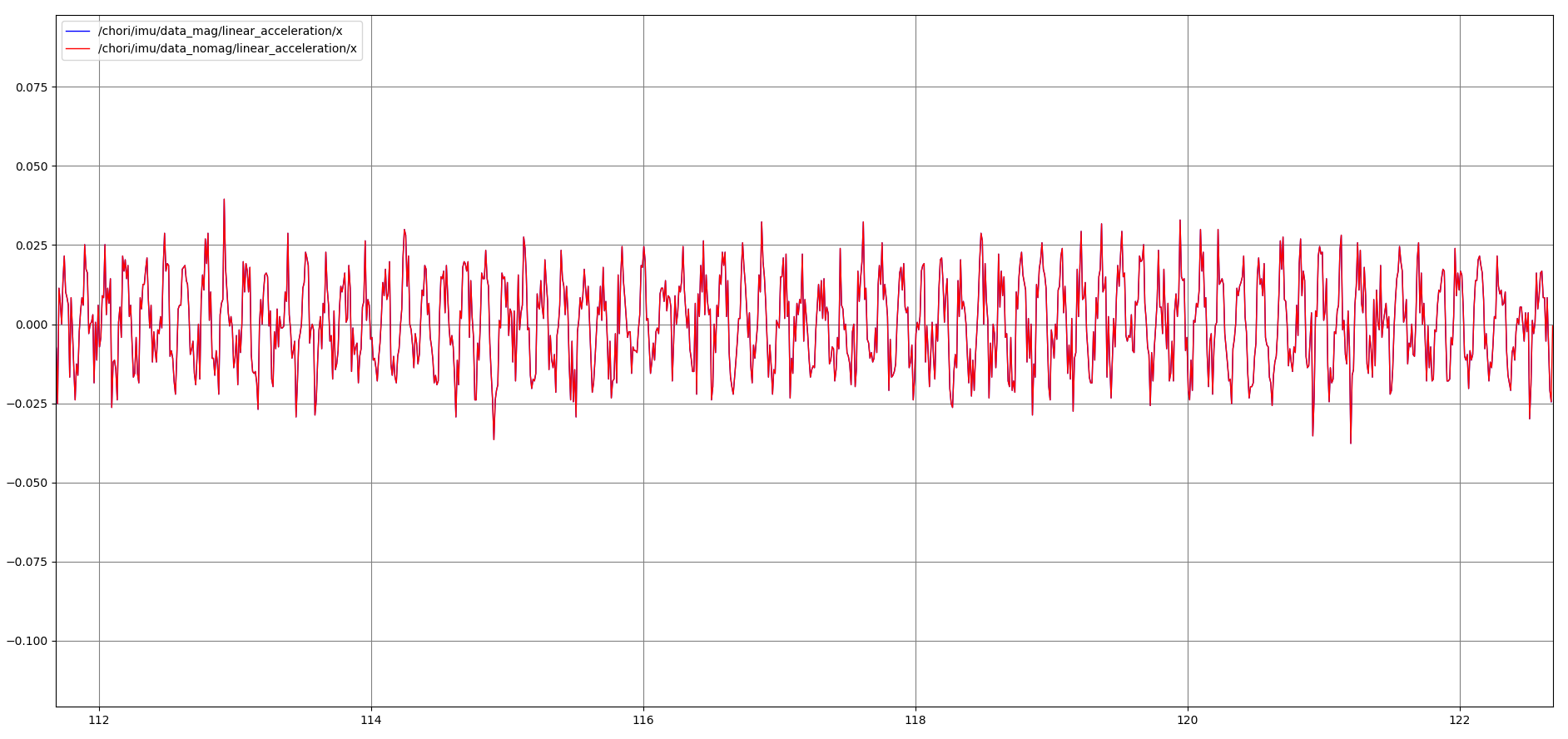
| 2022-01-08 10:41:34 -0500 | marked best answer | robot_localization perform worst just adding magnetometer to imu_filter_madgwick Hi, I'm trying to find some robot_localization issue on my unmanned surface vessel. So I've started with the simplest case: integrating just the IMU x and y acceleration on a table (I'm mean, a static test) I'm using an ICM20602 and published data @100Hz using rosserial to raspberry pi 3b+. In the Pi I have a robot_localization ekf node, some static tf and imu_filter_madgwick. imu_filter output is on /chori/imu/data topic. I've recorded two bagfile, one setting (param name="~use_mag" value="true") and another with param name="~use_mag" value="false" In the first case, position output from RL increased very fast. In the second case, position output increase slowly, as I expected. I can't find any difference on linear acceleration output from imu_filter with and without "use_mag" parameter equal to "true" or "false". launch, config and bag files: https://drive.google.com/file/d/1EUJ7... EDIT: I'm trying to get position/velocity of my unmanned surface vessel. I have RTK GPS position and velocity in order to correct unbounded errors from the IMU. But on my field test I've noticed some extrange behavior between 2 GPS measurements. That is when the filter is using the IMU. So, as I said, I decide to make some static test using just the IMU (first) to see if I can find some issue. In this test I found that fusing just accelorometer data from imu_filter with and without magnetometer enabled make RL EKF perform really bad. I know that I will have unbounded position error, but with magnetometer enabled the error grows very fast compared with magnetometer disabled. My question is why? EDIT2: Just to clarify a little the test. I have IMU data (raw accelerometer, gyroscope and magnetometer) coming in to two imu_filter_madgwick instances. One of them have use_mag=true ans the other =false. Each output is used for two instance of RL ekf filter. Each one is configured to just fuse acceleration data, and working on 2D mode: imu0: chori/imu/data_mag imu0_config: [false, false, false, # x, y, z, false, false, false, # roll, pitch, yaw false, false, false, # vx, vy, vz false, false, false, # vroll, vpitch, vyaw true, true, false] # ax, ay, az I expect that velocity and position output growth unbounded. But as I'm making an static test I expect the output increase "slowly".
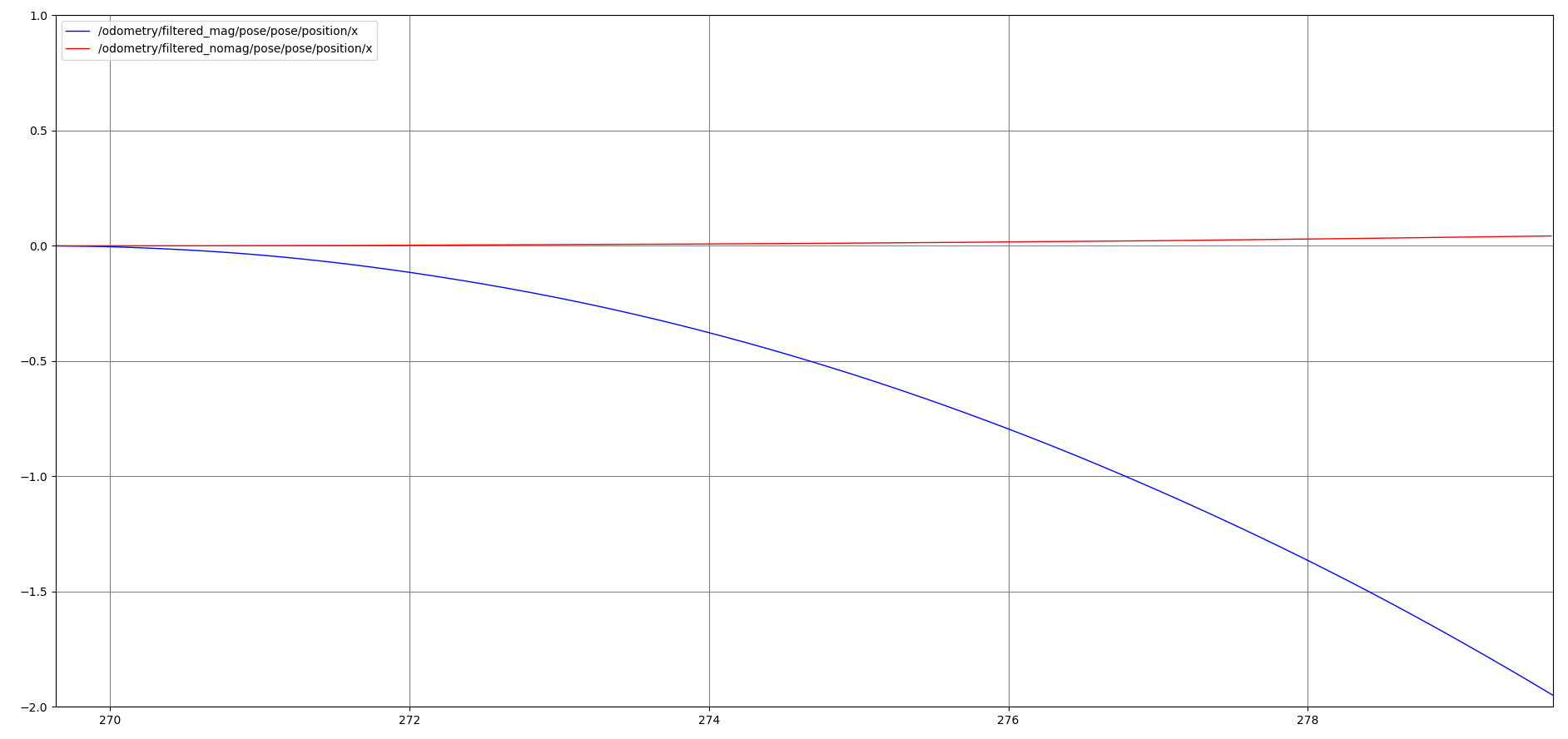
This is the X acceleration output of each imu_filter. As you can see both of them are equal. The same is for Y and Z axis. Then thing is that RL output increase faster on imu_filter instance with use_mag=true:
And as you can see, in 10 second it accumulate 2mts of error, wich is a lot compared with a couple of centimeter on the RL with acceleration data coming from imu_filter instance with use_mag=false. Thank |
| 2021-12-19 18:11:02 -0500 | marked best answer | Fusing GPS velocity with robot_localization Hi, I'm working on an anmanned surface vessel, currently I have an IMU publishing RAW data, then a magnetometer and imu_filter_madgwick to get orientation. Finally I have a RTK GPS (F9P from ArduSimple) and using kummar ublox driver I have /fix messages. Right now I',m fusing all of this with RL, one ekf and one navsat node. It seems to work right on a static test (I can't make test on water yet). I saw that F9P is reporting velocity and wondering if I will get better results fusing this data. If so, what is the best way of doing it. EDIT: here is a repo with config and logfile. Regarding velocity message: It's in ENU frame, but I have a node to rotate it to body_frame. The localization launch file is localize-offline.launch It brings up everything. I've tested adding this message and the result seems to not improve. In the bag file and current configuration it seems that there is some miss-alignment or something else, because on some parts of the path the IMU (and RL) seems to not align with the trajectory of the ASV. BTW, the test is an Anmanned Surface Vessel, controlling in MANUAL mode on shallow water. There was some wind and water current in the test. The GPS is e F9P RTK from ardusimple. EDIT2: ekf config file |
| 2021-12-15 11:42:00 -0500 | received badge | ● Notable Question (source) |
| 2021-12-08 09:03:19 -0500 | commented answer | Fusing GPS velocity with robot_localization Updated the question Tom, thank |
| 2021-12-08 09:01:50 -0500 | edited question | Fusing GPS velocity with robot_localization Fusing GPS velocity with robot_localization Hi, I'm working on an anmanned surface vessel, currently I have an IMU publi |
| 2021-12-04 11:04:36 -0500 | received badge | ● Popular Question (source) |
| 2021-10-27 20:08:51 -0500 | received badge | ● Notable Question (source) |
| 2021-10-19 21:37:43 -0500 | received badge | ● Famous Question (source) |
| 2021-10-18 22:38:04 -0500 | asked a question | fusing high precision heading fusing high presicion heading with robot_localization Hi, I would like to fuse heading (coming from 2 f9p gps working as |
| 2021-10-07 09:41:35 -0500 | commented answer | Fusing GPS velocity with robot_localization My big concern is why IMU is not aligned to the ASV trajectory and how to improve it. |
| 2021-10-07 09:38:52 -0500 | commented answer | Fusing GPS velocity with robot_localization what kind of sample would you like to see? I could try to run two R_L instance, one with GPS_VEL and one without it in o |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.