| 2020-04-25 17:18:55 -0500 | marked best answer | Start to teleop My own Robot Model Hi ,
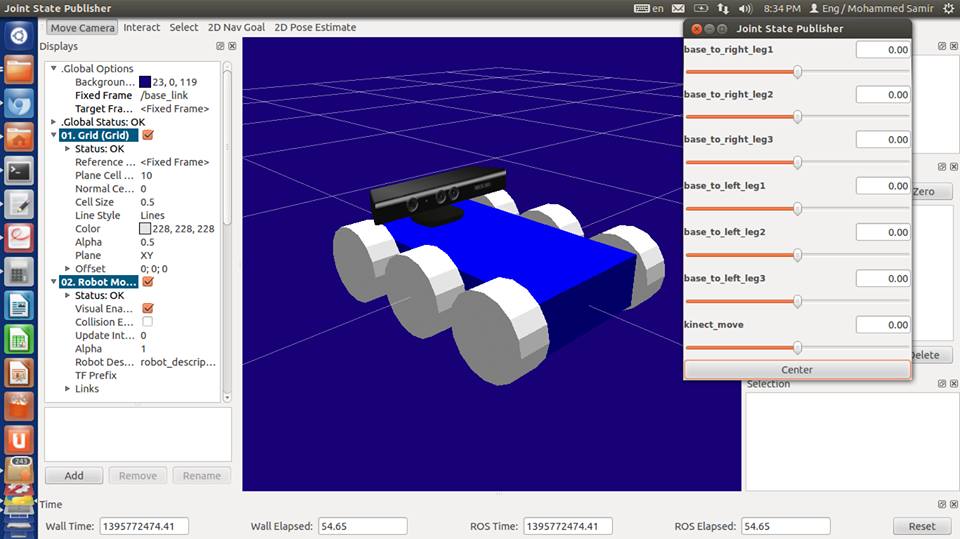
I built my own robot model as a urdf file .. Like In this Tutorial It looks In RVIZ :
 Now, I want to start to test apps on my model like teleop to start to move it with Keyboard . What Should I do ??
I think firstly Open a world to Gazebo
Secondly, Load my robot on the world .... I DON'T Know HOW ???????????
Third, Start to operate teleop node to start to move .... I WANT a CODE fit to my robot model ??
Actually I can't find a Stack that can operate apps on my robot thanks |
| 2020-04-21 23:07:28 -0500 | received badge | ● Favorite Question
(source)
|
| 2020-04-21 23:07:14 -0500 | received badge | ● Good Question
(source)
|
| 2017-07-15 13:24:39 -0500 | received badge | ● Good Question
(source)
|
| 2016-04-19 10:01:42 -0500 | received badge | ● Famous Question
(source)
|
| 2015-09-18 18:47:31 -0500 | marked best answer | install mod_semantic_map Hi ,i want to install mod_semantic_map
but i don't understand that it is not yet in our index.!!
what should i do about this ?! i can't understand |
| 2015-09-01 00:56:34 -0500 | marked best answer | the best detect and recognition method Hi all, i am building my vision system to detect and recognition objects .. firstly, i did object 3D model cloud points Using Roboearth Stack then tried to detect it with roboearth detector package but it isn't the best because: - detect Only texture objects and i have One colored objects
- red marker not located all the time
- can't detect the object when turning it reversal
- i tried to add 2 models to detect them in the same time but it didn't work
i will make some reasoning relations on these objects after that in Knowrob So, i want a help to choose the best method to detection and recognition objects
i am reading in bigg_detector now and searching at others .. any help to choose the best detect and recognition method ?? |
| 2015-08-31 21:15:09 -0500 | marked best answer | can't detect object model Hi all, i made 3D object model with roboearth stack like in this tutorial
http://www.ros.org/wiki/roboearth/Tutorials/Record%20an%20object%20model when i tried to detect this object using rosrun re_kinect_object_detector re_kinect
and rosrun re_object_detector_gui detect
it begin to read the model then received cloud points and open the detect gui but No detection happened!
No error just receiving point clouds for a long time !!
No red mask on the object like in this picture : 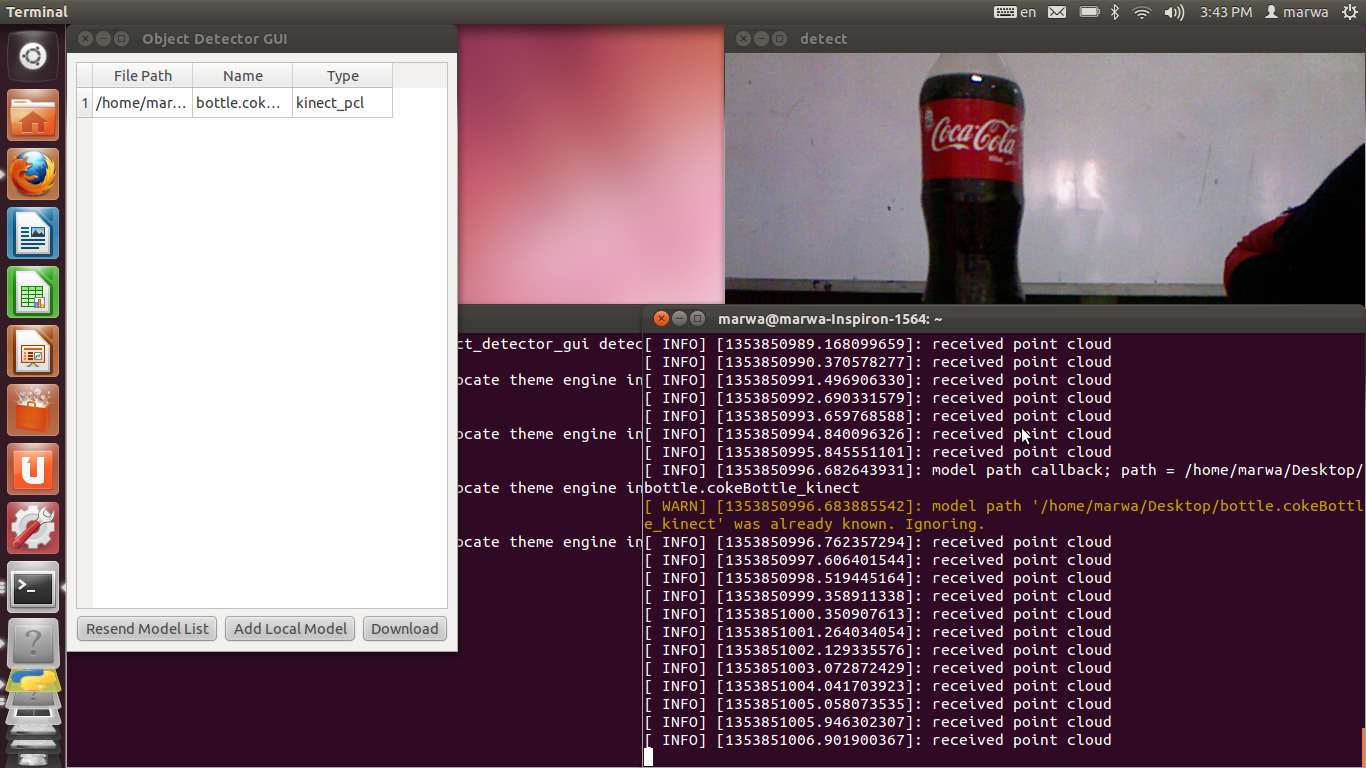
|
| 2015-08-31 20:58:23 -0500 | marked best answer | can't record cloud points Hi,i am trying to record object model using Roboearth stack
firstly , i set up my enviroment kinect and marker
then, opened openni launch for the kinect
and enabled depth_registeration
after that i begin to
rosrun re_object_recorder record_gui and the gui opened but can't recieved any cloud points !! maker detected well and light is fine like in pictures below
i decreased distance of marker in gui but still no recieved any cloud point !! any help ?? 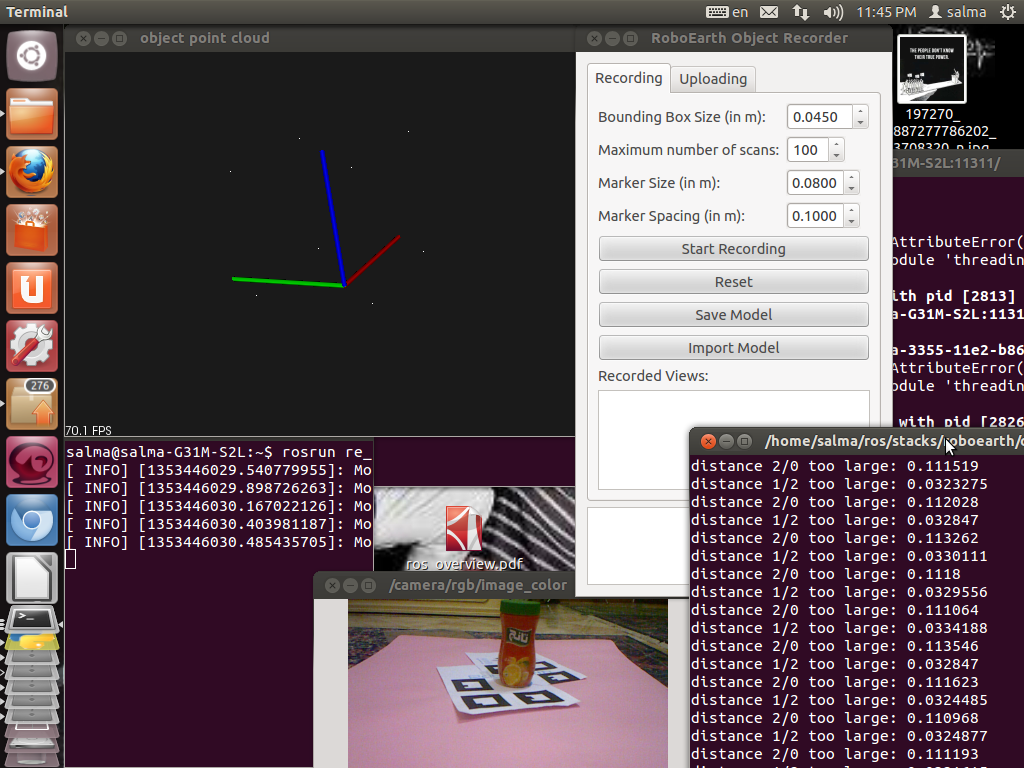
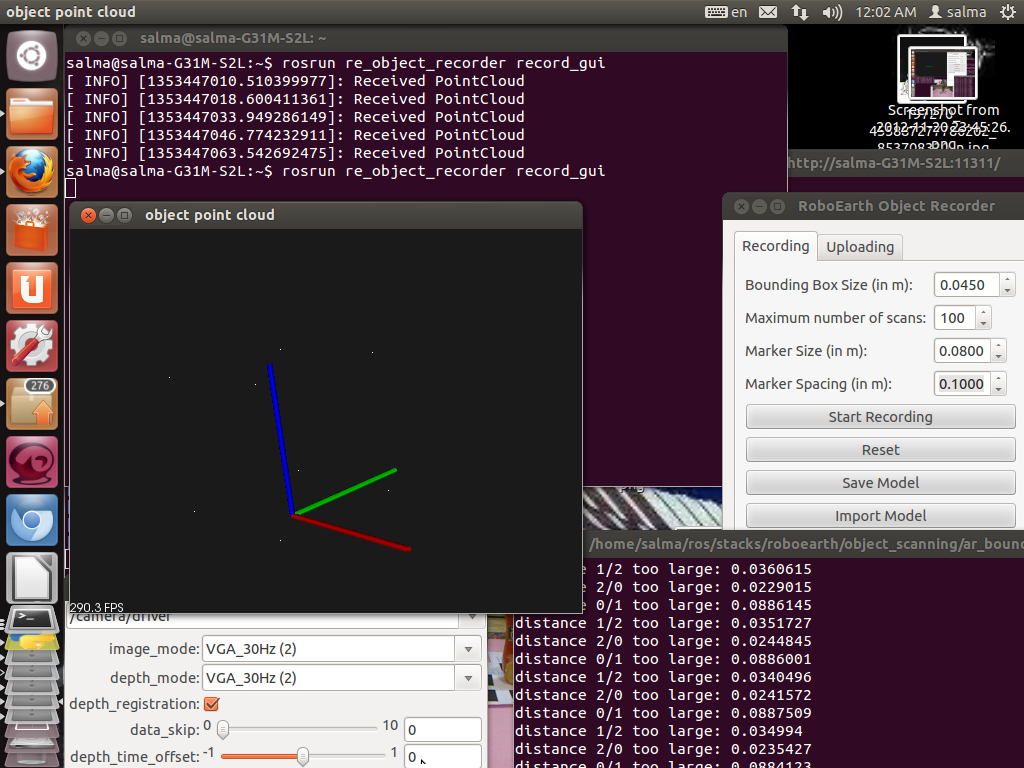
and rviz can't recieve any cloud point too ! |
| 2015-08-31 20:56:16 -0500 | marked best answer | kinect or monocular camera ?? Hi,should i use kinect to do a semantic map ? can i use just monocular camera ?
what all benefits to use a kinect in roboearth robots that can't done using normal camera ? and if i want to navigate my robot within a room to reach the table , and begin to infer what is missing components in this table to do this i must upload object maps of the all table components to Roboearth server
using ( kinect or camera ?? )
and this semantic mapping(must be kinect or can use camera) ??
and begin to matching a picture of object with these models in the Database so it takes a pictures when reaching the table ? all these using of camera in the project make me Confused thanks in advance :) |
| 2015-08-31 20:54:24 -0500 | marked best answer | installation RoboEarth packages Hi, In this link http://www.ros.org/wiki/roboearth
i try to install roboearth packages re_comm ,re_kinect_object_detector,....etc in my fuerte i begin by typing command : sudo apt-get install python-rosinstall
it begin ti install normally
then i begin typing command : $ rosinstall ~/ros /opt/ros/fuerte 'http://www.ros.org/wiki/roboearth?action=AttachFile&do=get&target=roboearth.rosinstall'
it appear rosinstall operating on /home/salma/ros from specifications in rosinstall files /opt/ros/fuerte, http://www.ros.org/wiki/roboearth?action=AttachFile&do=get&target=roboearth.rosinstall
(Over-)Writing /home/salma/ros/.rosinstall
rosinstall update complete.
Now, type 'source /home/salma/ros/setup.bash' to set up your environment.
Add that to the bottom of your ~/.bashrc to set it up every time.
If you are not using bash please see http://www.ros.org/wiki/rosinstall/NonBashShells
salma@salma-G31M-S2L:~$ [sudo] password for salma:
[sudo]: command not found
salma@salma-G31M-S2L:~$ Reading package lists... Done
Reading: command not found
salma@salma-G31M-S2L:~$ Building dependency tree
Building: command not found
salma@salma-G31M-S2L:~$ Reading state information... Done
Reading: command not found
salma@salma-G31M-S2L:~$ The following extra packages will be installed:
No command 'The' found, did you mean:
Command 'the' from package 'the' (universe)
The: command not found
salma@salma-G31M-S2L:~$ bzr git git-core git-man liberror-perl mercurial mercurial-common
bzr: ERROR: unknown command "git"
salma@salma-G31M-S2L:~$ python-bzrlib python-configobj python-vcstools
python-bzrlib: command not found
salma@salma-G31M-S2L:~$ Suggested packages:
Suggested: command not found
salma@salma-G31M-S2L:~$ bzr-doc bzr-gtk bzr-svn python-bzrlib.tests bzrtools git-daemon-run
bzr-doc: command not found
salma@salma-G31M-S2L:~$ git-daemon-sysvinit git-doc git-el git-arch git-cvs git-svn git-email
git-daemon-sysvinit: command not found
salma@salma-G31M-S2L:~$ git-gui gitk gitweb qct vim emacs kdiff3 tkdiff meld xxdiff python-mysqldb
git-gui: command not found
salma@salma-G31M-S2L:~$ python-kerberos python-gpgme python-bzrlib-dbg
python-kerberos: command not found
salma@salma-G31M-S2L:~$ The following NEW packages will be installed:
No command 'The' found, did you mean:
Command 'the' from package 'the' (universe)
The: command not found
salma@salma-G31M-S2L:~$ bzr git git-core git-man liberror-perl mercurial mercurial-common
bzr: ERROR: unknown command "git"
salma@salma-G31M-S2L:~$ python-bzrlib python-configobj python-rosinstall python-vcstools
python-bzrlib: command not found
salma@salma-G31M-S2L:~$ 0 upgraded, 11 newly installed, 0 to remove and 143 not upgraded.
0: command not found
salma@salma-G31M-S2L:~$ Need to get 10.7 MB of archives.
No command 'Need' found, did you mean:
Command 'seed' from package 'seed' (universe)
Need: command not found
salma@salma-G31M-S2L:~$ After this operation, 32.4 MB of additional disk space will be used.
After: command not found
salma@salma-G31M-S2L:~$ Do you want to continue [Y/n]? y
Do: command not found
salma@salma-G31M-S2L:~$ Get:1 http://packages.ros.org/ros/ubuntu/ precise/main python-vcstools all 0.1.22-1 [20.0 kB]
Get:1: command not found
then the stack become in my Home not in my ROS/furete/stacks to deal with !
salma@salma-G31M-S2L:~$ ls ~/ros
pkgs setup.bash setup.sh setup.zsh stacks
|
| 2015-08-31 20:37:35 -0500 | received badge | ● Famous Question
(source)
|
| 2015-06-30 19:04:53 -0500 | marked best answer | Turtlebot gazebo Can i install Turtlebot_simulator on my Fuerte Ubuntu 12.04 ??
Thanks in advance :) |
| 2015-06-26 16:57:25 -0500 | marked best answer | errors in stacks in ROS Hi, I'm not familiar at ROS errors,,
firstly , i installed Roboearth Stack using these four steps : http://www.ros.org/wiki/roboearth the result of that : I have the roboearth stack in Home/ros i made a connection between this and ROS
by opening bashrc file
and typed "export ROS_PACKAGE_PATH=/opt/ros/fuerte/share:/opt/ros/fuerte/stacks:/home/ros" and saved i begin to run re_comm package in roboearth stack but itthrow an error salma@salma-G31M-S2L:~$ rosrun re_comm run
[rospack] Error: stack/package re_comm not found
i don't know why ???
re_comm not in /opt/ros/fuerte/stacks
but in /home/ros/roboearth why not found ?? and this is the result of rosmake roboearth now salma@salma-G31M-S2L:~$ rosmake roboearth
[ rosmake ] rosmake starting...
[ rosmake ] Packages requested are: ['roboearth']
[ rosmake ] Logging to directory /home/salma/.ros/rosmake/rosmake_output-20121111-201259
[ rosmake ] Expanded args ['roboearth'] to:
[]
[ rosmake ] WARNING: The following args could not be parsed as stacks or packages: ['roboearth']
[ rosmake ] ERROR: No arguments could be parsed into valid package or stack names.
|
| 2015-06-26 01:04:31 -0500 | received badge | ● Famous Question
(source)
|
| 2015-04-23 03:32:28 -0500 | marked best answer | error when installing ROS on Ubuntu 12.04 I have Ubuntu 12.04 and trying to install ROS using this tutorial
http://www.ros.org/wiki/fuerte/Installation/Ubuntu when trying this command
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu precise main" > /etc/apt/sources.list.d/ros-latest.list' found error : sudo: unable to change to sudoers gid: Operation not permitted
sudo: setresuid() [0, 0, 0] -> [116, -1, -1]: Operation not permitted what the wrong ?? :) |
| 2014-12-17 11:21:33 -0500 | received badge | ● Favorite Question
(source)
|
| 2014-08-04 23:03:30 -0500 | received badge | ● Famous Question
(source)
|
| 2014-05-09 09:49:26 -0500 | received badge | ● Notable Question
(source)
|
| 2014-05-09 09:49:26 -0500 | received badge | ● Popular Question
(source)
|
| 2014-05-02 09:46:44 -0500 | commented answer | Face Recognition using Kinect @adreno can she just update the name of the topic in the cpp file .. In the code line of subscribe from /camera/image_raw . can she update it to /camera/rgb/image_raw ?? |
| 2014-04-30 09:57:48 -0500 | asked a question | gscam building failure Hi all,
I am working on fuerte distribution and want to install gscam package I command : svn checkout https://brown-ros-pkg.googlecode.com/svn/trunk/distribution/brown_perception
I placed it in my workspace in home /home/salma/ws_salma But when i rosmake it by rosmake gscam
it has 1 failure : [ rosmake ] rosmake starting...
[ rosmake ] Packages requested are: ['gscam']
[ rosmake ] Logging to directory /home/salma/.ros/rosmake/rosmake_output-20140430-214721
[ rosmake ] Expanded args ['gscam'] to:
['gscam']
[rosmake-1] Starting >>> geometry_msgs [ make ]
[rosmake-0] Starting >>> roslang [ make ]
[rosmake-1] Finished <<< geometry_msgs No Makefile in package geometry_msgs
[rosmake-1] Starting >>> sensor_msgs [ make ]
[rosmake-2] Starting >>> rosbuild [ make ]
[rosmake-3] Starting >>> roslib [ make ]
[rosmake-1] Finished <<< sensor_msgs No Makefile in package sensor_msgs
[rosmake-2] Finished <<< rosbuild No Makefile in package rosbuild
[rosmake-1] Starting >>> rosconsole [ make ]
[rosmake-2] Starting >>> message_filters [ make ]
[rosmake-3] Finished <<< roslib No Makefile in package roslib
[rosmake-1] Finished <<< rosconsole No Makefile in package rosconsole
[rosmake-1] Starting >>> common_rosdeps [ make ]
[rosmake-3] Starting >>> pluginlib [ make ]
[rosmake-0] Finished <<< roslang No Makefile in package roslang
[rosmake-0] Starting >>> roscpp [ make ]
[rosmake-2] Finished <<< message_filters No Makefile in package message_filters
[rosmake-1] Finished <<< common_rosdeps ROS_NOBUILD in package common_rosdeps
[rosmake-3] Finished <<< pluginlib ROS_NOBUILD in package pluginlib
[rosmake-0] Finished <<< roscpp No Makefile in package roscpp
[rosmake-0] Starting >>> camera_calibration_parsers [ make ]
[rosmake-3] Starting >>> image_transport [ make ]
[rosmake-3] Finished <<< image_transport ROS_NOBUILD in package image_transport
[rosmake-0] Finished <<< camera_calibration_parsers ROS_NOBUILD in package camera_calibration_parsers
[rosmake-0] Starting >>> gscam [ make ]
[ rosmake ] Last 40 linescam: 7.9 sec ] [ 1 Active 12/13 Complete ]
{-------------------------------------------------------------------------------
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Check for working CXX compiler: /usr/bin/c++
-- Check for working CXX compiler: /usr/bin/c++ -- works
-- Detecting CXX compiler ABI info
-- Detecting CXX compiler ABI info - done
-- Found PythonInterp: /usr/bin/python2.7
[rosbuild] Building package gscam
[rosbuild] Cached build flags older than manifests; calling rospack to get flags
[rosbuild] Including /opt/ros/fuerte/share/roscpp/rosbuild/roscpp.cmake
[rosbuild] Including /opt/ros/fuerte/share/roslisp/rosbuild/roslisp.cmake
[rosbuild] Including /opt/ros/fuerte/share/rospy/rosbuild/rospy.cmake
-- Configuring done
-- Generating done
-- Build files have been written to: /home/salma/ws_salma/brown_perception/gscam/build
cd build && make -j4 -l4
make[1]: Entering directory `/home/salma/ws_salma/brown_perception/gscam/build'
make[2]: Entering directory `/home/salma/ws_salma/brown_perception/gscam/build'
make[3]: Entering directory `/home/salma/ws_salma/brown_perception/gscam/build'
Scanning dependencies of target rospack_genmsg_libexe
make[3]: Leaving directory `/home/salma/ws_salma/brown_perception/gscam/build'
[ 0%] Built target rospack_genmsg_libexe
make[3]: Entering directory `/home/salma/ws_salma/brown_perception/gscam/build'
Scanning dependencies of target rosbuild_precompile
make[3]: Leaving directory `/home/salma/ws_salma/brown_perception/gscam/build'
[ 0%] Built target rosbuild_precompile
make[3]: Entering directory `/home/salma/ws_salma/brown_perception/gscam/build'
Scanning dependencies of target gscam
make[3]: Leaving directory `/home/salma/ws_salma/brown_perception/gscam/build'
make[3]: Entering directory `/home/salma/ws_salma/brown_perception/gscam/build'
[100%] Building CXX object CMakeFiles/gscam.dir/src/gscam.o
/home/salma/ws_salma/brown_perception/gscam/src/gscam.cpp:6:21: fatal error: gst/gst.h: No such file or directory
compilation terminated.
make[3]: *** [CMakeFiles/gscam.dir/src/gscam.o] Error 1
make[3]: Leaving directory `/home ...
(more) |
| 2014-04-20 06:53:53 -0500 | marked best answer | search in map Hi , i made a 2Dmap for my turtlebot using gmapping, i want it to search for an object in the room that mapped , how can i do this Autonomously ?
thanks :) |
| 2014-04-20 06:53:51 -0500 | marked best answer | error in build a package Hi, i has a package in my home named navibot , it's CMake is : cmake_minimum_required(VERSION 2.4.6)
include($ENV{ROS_ROOT}/core/rosbuild/rosbuild.cmake)
# Set the build type. Options are:
# Coverage : w/ debug symbols, w/o optimization, w/ code-coverage
# Debug : w/ debug symbols, w/o optimization
# Release : w/o debug symbols, w/ optimization
# RelWithDebInfo : w/ debug symbols, w/ optimization
# MinSizeRel : w/o debug symbols, w/ optimization, stripped binaries
#set(ROS_BUILD_TYPE RelWithDebInfo)
rosbuild_init()
#set the default path for built executables to the "bin" directory
set(EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin)
#set the default path for built libraries to the "lib" directory
set(LIBRARY_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/lib)
#uncomment if you have defined messages
#rosbuild_genmsg()
#uncomment if you have defined services
#rosbuild_gensrv()
#common commands for building c++ executables and libraries
#rosbuild_add_library(${PROJECT_NAME} src/example.cpp)
rosbuild_add_boost_directories()
rosbuild_add_executable(navibot src/navibot_v1.1New.cpp)
#target_link_libraries(example ${PROJECT_NAME})
when building it i get 1 failure :
[ rosmake ] rosmake starting...
[ rosmake ] Packages requested are: ['navibot']
[ rosmake ] Logging to directory /home/salma/.ros/rosmake/rosmake_output-20130320-070702
[ rosmake ] Expanded args ['navibot'] to:
['navibot']
[rosmake-0] Starting >>> geometry_msgs [ make ]
[rosmake-0] Finished <<< geometry_msgs No Makefile in package geometry_msgs
[rosmake-0] Starting >>> roslang [ make ]
[rosmake-0] Finished <<< roslang No Makefile in package roslang
[rosmake-0] Starting >>> rospy [ make ]
[rosmake-0] Finished <<< rospy No Makefile in package rospy
[rosmake-0] Starting >>> roscpp [ make ]
[rosmake-0] Finished <<< roscpp No Makefile in package roscpp
[rosmake-0] Starting >>> sensor_msgs [ make ]
[rosmake-0] Finished <<< sensor_msgs No Makefile in package sensor_msgs
[rosmake-0] Starting >>> std_msgs [ make ]
[rosmake-0] Finished <<< std_msgs No Makefile in package std_msgs
[rosmake-0] Starting >>> opencv2 [ make ]
[rosmake-0] Finished <<< opencv2 ROS_NOBUILD in package opencv2
[rosmake-0] Starting >>> cv_bridge [ make ]
[rosmake-0] Finished <<< cv_bridge ROS_NOBUILD in package cv_bridge
[rosmake-0] Starting >>> rosbuild [ make ]
[rosmake-0] Finished <<< rosbuild No Makefile in package rosbuild
[rosmake-0] Starting >>> roslib [ make ]
[rosmake-0] Finished <<< roslib No Makefile in package roslib
[rosmake-0] Starting >>> rosconsole [ make ]
[rosmake-0] Finished <<< rosconsole No Makefile in package rosconsole
[rosmake-0] Starting >>> pluginlib [ make ]
[rosmake-0] Finished <<< pluginlib ROS_NOBUILD in package pluginlib
[rosmake-0] Starting >>> message_filters [ make ]
[rosmake-0] Finished <<< message_filters No Makefile in package message_filters
[rosmake-0] Starting >>> image_transport [ make ]
[rosmake-0] Finished <<< image_transport ROS_NOBUILD in package image_transport
[rosmake-0] Starting >>> navibot [ make ]
[ rosmake ] All 38 linesavibot: 5.1 sec ] [ 1 Active 14/15 Complete ]
{-------------------------------------------------------------------------------
mkdir -p bin
cd build && cmake -Wdev -DCMAKE_TOOLCHAIN_FILE=`rospack find rosbuild`/rostoolchain.cmake ..
[rosbuild] Building package navibot
[rosbuild] Including /opt/ros/fuerte/stacks/client_rosjava_jni/rosjava_jni/cmake/rosjava.cmake
[rosbuild] Including /opt/ros/fuerte/share/roscpp/rosbuild/roscpp.cmake
[rosbuild] Including /opt/ros/fuerte/share/roslisp/rosbuild/roslisp.cmake
[rosbuild] Including /opt/ros/fuerte/share/rospy/rosbuild/rospy.cmake
-- Configuring done
-- Generating done
CMake Warning:
Manually-specified variables were not used by the project:
CMAKE_TOOLCHAIN_FILE
-- Build files have been written to: /home/salma/navibot/build
cd build && make -l1
make[1]: Entering directory `/home/salma/navibot/build'
make[2]: Entering directory `/home/salma/navibot/build'
make[3]: Entering directory `/home/salma/navibot/build'
make[3]: Leaving directory `/home/salma/navibot/build'
[ 0%] Built target rospack_genmsg_libexe
make[3]: Entering directory `/home/salma/navibot/build'
make[3]: Leaving directory `/home/salma/navibot/build'
[ 0%] Built target rosbuild_precompile
make[3]: Entering directory `/home/salma ...
(more) |
| 2014-04-20 06:53:50 -0500 | marked best answer | Enclosure Escape and object seeking Hi all , Can i get the code in these tutorials about ROS in roswiki ? these vedios attached in Beginner Level ROS Tutorial Video Demos at ANU here |
| 2014-04-20 06:52:31 -0500 | marked best answer | Error with camera calibration file Hi everybody,
I got this error when running roslaunch openni_launch openni.launch
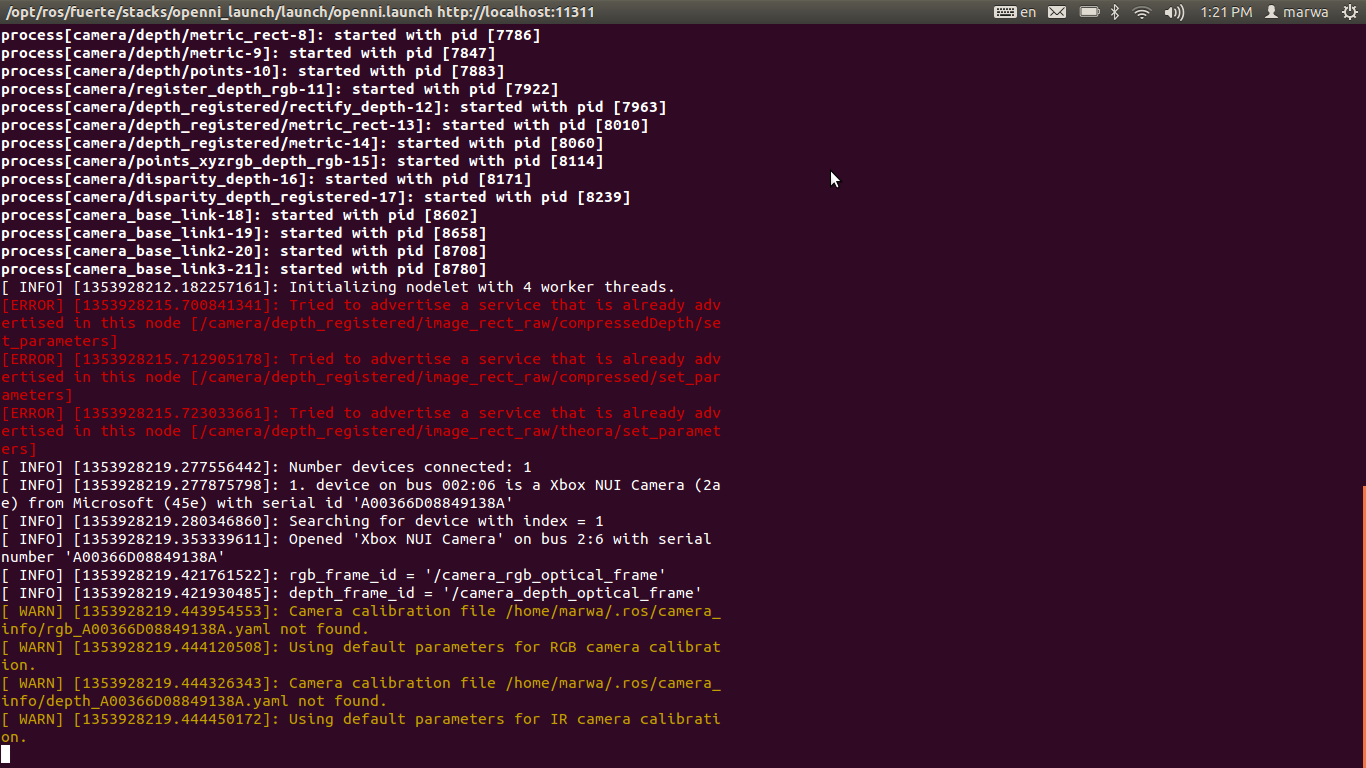
what is the solution for this error !
thanks in advance. |
| 2014-04-20 06:52:30 -0500 | marked best answer | all benefits to use overlay Hi, i want to know all benefits for using overlays in my home in my fuerte ? like in this link
http://www.ros.org/wiki/fuerte/Installation/Overlays i am now using my home/ros stacks and linked it with ros core in /opt 1- what the benefits to made an overlay in my home and set my /home/ros stacks in it ? 2- I want to change somethings in a cpp code in packages,, should i give permissons to every file i want to change it's code ?? |
| 2014-04-20 06:52:04 -0500 | marked best answer | inferring missing objects Hi, i begin to do asimple robot that can inferring missing objects on the table like that : firstly i want to list all i need to do this
1- kinect : can i use any type of kinect or must openni kinect ? or can i use a normal camera ?? why ? 2- the simulation in the picture up is it gazebo ?? how can i link my simulation with reasoning and knowrob ?? 3- the relation between my simulation and the picture captuered by my kinect or camera ? Thanks :) |
| 2014-04-20 06:52:02 -0500 | marked best answer | How can I do tabletop manipulation with a 5DOF arm? Hi, if i want to do my robotic arm to recognition an object using camera and get it
there are missing steps for me like that - Do i get the kinematics and inverse kinematics of my arm by Kinematic Stack ??
- what is all benefits of making my arm simulation on gazebo and RVIZ ?
- first write my URDF file of my arm or simulate it firstly ??
- what the most stacks and package i will deal with in this project using arm 5 DOF and one camera ?
|
| 2014-04-15 02:28:36 -0500 | commented answer | Start to teleop My own Robot Model Hi Raul, Yes this helps me thanks very much. |
| 2014-04-12 10:59:23 -0500 | commented answer | Start to teleop My own Robot Model Hi Raul, demmeln
I have finished my robot model description and a world on gazebo . I have tried turtlrbot teleop package and it works well now on Gazebo :).
Now i want to build a map by gmapping .
I have opened Rviz but some error occur in RobotModel plugins and laser scan plugins.
i am working to fix them.
thanks all for your help. |
| 2014-04-08 07:33:30 -0500 | received badge | ● Nice Question
(source)
|
| 2014-04-07 03:34:58 -0500 | received badge | ● Enthusiast
|
| 2014-04-04 12:30:17 -0500 | commented answer | Start to teleop My own Robot Model Hi demmeln, I have finished my robot description files About environment world in gazebo, Not a problem I will use the default gazebo world file The issue now that i want to use the teleop app like that in the turtlebot SDK or whatever on my own robot But i didn't find any apps on a similar robot based on wild thumper base on ROS |
| 2014-04-04 12:29:04 -0500 | commented answer | Start to teleop My own Robot Model Hi Kurt,
I have finished my robot description files
About environment world in gazebo, Not a problem I will use the default gazebo world file
The issue now that i want to use the teleop app like that in the turtlebot SDK or whatever on my own robot
But i didn't find any apps on a similar robot based on wild thumper base on ROS |
| 2014-04-04 01:49:36 -0500 | received badge | ● Famous Question
(source)
|
| 2014-04-03 04:54:42 -0500 | received badge | ● Notable Question
(source)
|
| 2014-04-03 00:48:54 -0500 | received badge | ● Popular Question
(source)
|
| 2014-04-01 09:22:19 -0500 | received badge | ● Nice Answer
(source)
|

 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.