The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-03-22 17:30:36 -0500 | received badge | ● Famous Question (source) |
| 2022-12-19 10:26:47 -0500 | received badge | ● Stellar Question (source) |
| 2020-02-14 17:39:55 -0500 | received badge | ● Famous Question (source) |
| 2019-01-30 22:57:21 -0500 | received badge | ● Favorite Question (source) |
| 2019-01-30 22:53:01 -0500 | marked best answer | How to create a Publisher about trajectory path, then show it in rviz? Hi, thank you for your attention. I am running gmapping_demo with turtlebot. I want to know how to create a Publisher of the (robot) trajectory path in rviz. And then I could show it in rviz. It is not path planning. It's just wnat a line will show after the robot walk through. Is there any tutorial can teach me? I actually want to know robot's trajectory (create a Publisher There is a video (Just like the red trajectory path). I want to do is to show Every time robots walk past |
| 2018-11-22 18:15:09 -0500 | received badge | ● Famous Question (source) |
| 2018-06-22 17:34:30 -0500 | received badge | ● Famous Question (source) |
| 2018-06-20 05:00:42 -0500 | received badge | ● Popular Question (source) |
| 2018-06-18 09:29:50 -0500 | commented question | I have some questions about globaolpaln in ROS my robot is kobuki,I think I may know the answer! It is possible that the path planned by A* is on the grid not on the |
| 2018-06-18 07:45:53 -0500 | edited question | I have some questions about globaolpaln in ROS I have some questions about globaolpaln in ROS I found that when I was planning a global path, my starting point was (0, |
| 2018-06-18 07:45:27 -0500 | edited question | I have some questions about globaolpaln in ROS I have some questions about ROS path planning with globalplan I found that when I was planning a global path, my startin |
| 2018-06-18 07:44:40 -0500 | asked a question | I have some questions about globaolpaln in ROS I have some questions about ROS path planning with globalplan I found that when I was planning a global path, my startin |
| 2018-06-16 07:03:54 -0500 | commented answer | Why maps built through gmapping are so different from the actual environment, although it looks very similar. I am designing a system that can use the completed map for path planning and patrol sign-in。 According to what you said |
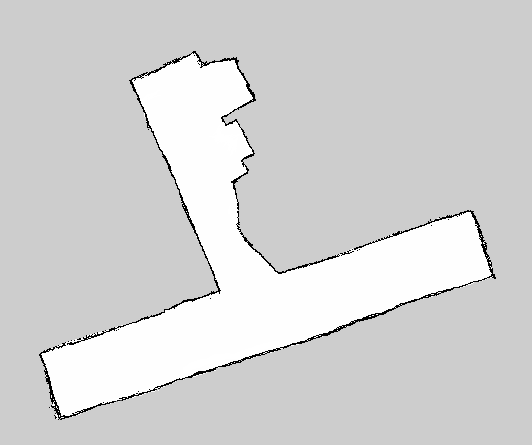
| 2018-06-15 16:00:48 -0500 | marked best answer | Why maps built through gmapping are so different from the actual environment, although it looks very similar. Greeting everyone, Sorry to disturb you all again, I have been trying SLAM these days, I found out why the built map is always bigger than the actual environment.
This is built by Gmapping. Area is 46m²
This is what I painted according to the actual scene. Area is 37m² Is it because the odometer error causes the map to be larger than the actual? If so, how can I correct it? Cheers!! |
| 2018-06-15 15:59:16 -0500 | commented answer | Why maps built through gmapping are so different from the actual environment, although it looks very similar. So is the fact that the 25% error is normal? This makes me more comfortable, or I always worry that the error is too |
| 2018-06-15 15:57:39 -0500 | received badge | ● Notable Question (source) |
| 2018-06-15 01:35:40 -0500 | received badge | ● Student (source) |
| 2018-06-14 14:26:15 -0500 | received badge | ● Popular Question (source) |
| 2018-06-14 05:17:32 -0500 | edited question | Why maps built through gmapping are so different from the actual environment, although it looks very similar. Why maps built through gmapping are so different from the actual environment, although it looks very similar. Greeting e |
| 2018-06-14 04:53:43 -0500 | commented question | How to get x,y from /move_base/NavfnROS/plan Thank you for your advice and help. Compared to our professor, you feel more kindly : ). I will continue to learn, wheth |
| 2018-06-14 04:06:20 -0500 | commented question | How to get x,y from /move_base/NavfnROS/plan Hello! Because ROS I was the first time I was exposed to the programming language, so my concept of using Python is stil |
| 2018-06-14 04:03:52 -0500 | asked a question | Why maps built through gmapping are so different from the actual environment, although it looks very similar. Why maps built through gmapping are so different from the actual environment, although it looks very similar. Greeting e |
| 2018-06-13 05:20:33 -0500 | commented question | How to get x,y from /move_base/NavfnROS/plan Finally, I used the excel filter to successfully analyze the remaining simple data. thank you~~ |
| 2018-06-12 07:43:39 -0500 | received badge | ● Notable Question (source) |
| 2018-06-12 05:53:38 -0500 | commented question | How to get x,y from /move_base/NavfnROS/plan sorry for using caps, OK I'll try to split it. ANW thank you for tour answer |
| 2018-06-12 05:49:30 -0500 | edited question | How to get x,y from /move_base/NavfnROS/plan How to get x,y from /move_base/NavfnROS/plan I want to record the msg that on the /move_base/NavfnROS/plan These msg c |
| 2018-06-12 05:46:35 -0500 | received badge | ● Popular Question (source) |
| 2018-06-12 05:14:58 -0500 | edited question | How to get x,y from /move_base/NavfnROS/plan How to get nav plan 's every poses in Path I want to record the msg that on the /move_base/NavfnROS/plan These msg cla |
| 2018-06-11 23:12:53 -0500 | commented question | How to get x,y from /move_base/NavfnROS/plan yes i know,but can i only grab the coordinate of position? because i can use the same way to grab the coordinates of / |
| 2018-06-11 20:24:12 -0500 | edited question | How to get x,y from /move_base/NavfnROS/plan How to get nav plan 's poses I want to record the msg that on the /move_base/NavfnROS/plan These msg class is Path , b |
| 2018-06-11 20:24:09 -0500 | edited question | How to get x,y from /move_base/NavfnROS/plan How to get nav plan 's poses I want to record the msg that on the /move_base/NavfnROS/plan These msg class is Path , b |
| 2018-06-11 20:18:15 -0500 | commented question | Gmapping error while connnecting with VLP16! Did you lost a </node> after <node pkg="tf" ?<="" p=""> |
| 2018-06-11 20:17:56 -0500 | commented question | Gmapping error while connnecting with VLP16! Did you lost a </node> after <node pkg="tf" ?<="" p=""> |
| 2018-06-11 20:04:31 -0500 | asked a question | How to get x,y from /move_base/NavfnROS/plan How to get nav plan 's poses I want to record the msg that on the /move_base/NavfnROS/plan These msg class is Path , b |
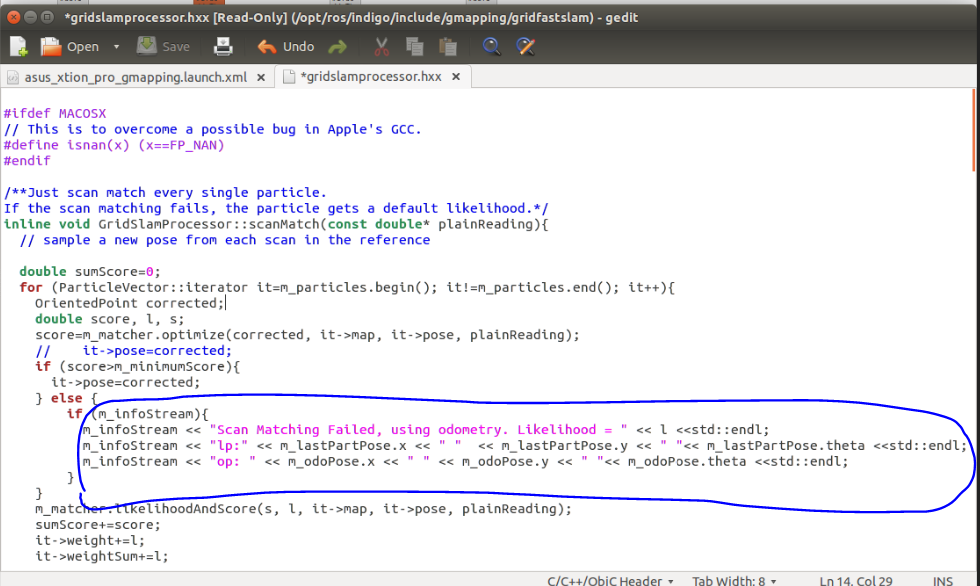
| 2018-06-07 11:20:12 -0500 | marked best answer | Some problem in gridslamprocess.hxx of slam_gmapping Sorry to disturb you all!! I found some problems about gmapping when I using Turtlebot Package, there is a document which named "gridslamprocess.hxx". I already modify it, but when I do catkin_make and create a new slam_gmapping, I run the new one,but I didn't see have any change after I modify it. I noticed that every time when I run gmapping, there are some information on the screen. Ex: When scanmatch Done! it will show laser poser: x,y,z on screen. When scanmatch failed,it will use odometry. Then show lp: x,y,z op:x,y,z on screen. So I want to get lp: op: laser pose These (x,y) information, so I'm trying to modify the source code. When I looked in the source code, I found gridslamprocess.hxx, but i did't see any happened after me modify it Of course, I already compile after modifying. I want to get m_lastpartpose.x m_lastpartpose.y m_odopose.x m_odopose.y
But I need some help.. Has anyone ever modified this file? Thank you very much!!😓 |
| 2018-06-07 04:16:55 -0500 | commented answer | Some problem in gridslamprocess.hxx of slam_gmapping I change slam_gmapping.cpp now, and i get what i want, thank you! |
| 2018-06-07 04:16:11 -0500 | commented question | Some problem in gridslamprocess.hxx of slam_gmapping Thank you~~ I'll get what I want now!! |
| 2018-06-07 01:47:36 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.