The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-10-26 12:37:13 -0500 | received badge | ● Nice Question (source) |
| 2020-12-07 18:46:35 -0500 | received badge | ● Nice Question (source) |
| 2020-07-08 20:18:12 -0500 | received badge | ● Famous Question (source) |
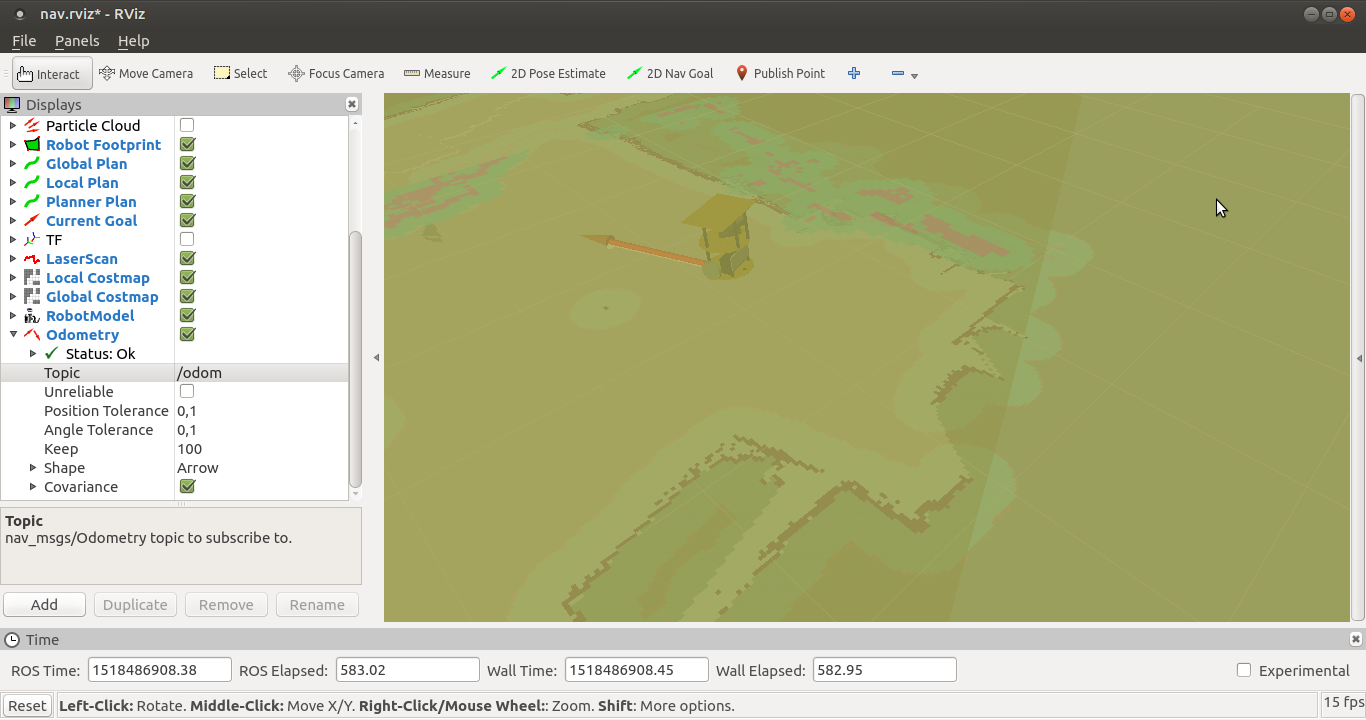
| 2019-04-08 01:22:09 -0500 | marked best answer | Rviz odometry is all yellow Hello guys! I have a problem in displaying odometry in Rviz. I use robot localization to fuse odometry from wheels and visual odometry from Kinect. When I turn on visualization in Rviza all screen seems to be yellow. And after several moves it totaly paints all with yellow colour.
I disabled tf from wheel odometry and from visual odometry. Only robot_localization provides tf with odom. Here is my robot_localization launch. And in addition odom that I get is very inaccurate. So what's problem? Why everything is yellow? |
| 2019-04-08 01:17:25 -0500 | marked best answer | Robot localization fusing wheel and visual odometry Hello. I'm trying to fuse whell and visual odometry in robot_localization package. But I get insufficiently accurate data on output. The robot is lost more strongly, than at use only a wheel odometry. It is especially noticeable that the robot is lost when it approaches very close to the wall. I'm using kinect and rtab_map for visual odometry. This is my launch file to robot_localization. <launch> <node pkg="robot_localization" type="ekf_localization_node" name="ekf_localization" clear_params="true"> </launch> What is right way to fuse whell and visual odoms? How should I set <rosparam param="odom0_config"> and <rosparam param="odom1_config">? |
| 2018-05-20 10:27:35 -0500 | received badge | ● Notable Question (source) |
| 2018-05-20 10:27:35 -0500 | received badge | ● Popular Question (source) |
| 2018-04-27 16:28:37 -0500 | received badge | ● Famous Question (source) |
| 2018-03-09 07:37:58 -0500 | received badge | ● Famous Question (source) |
| 2018-02-26 07:24:52 -0500 | received badge | ● Notable Question (source) |
| 2018-02-20 18:15:28 -0500 | received badge | ● Famous Question (source) |
| 2018-02-20 18:15:28 -0500 | received badge | ● Notable Question (source) |
| 2018-02-20 18:15:28 -0500 | received badge | ● Popular Question (source) |
| 2018-02-19 18:28:34 -0500 | commented answer | Rviz odometry is all yellow Thanks, Tom! How can I check if both of odoms exit in the same coordinate frames? |
| 2018-02-19 06:08:23 -0500 | received badge | ● Popular Question (source) |
| 2018-02-16 14:12:42 -0500 | received badge | ● Notable Question (source) |
| 2018-02-16 04:14:27 -0500 | received badge | ● Popular Question (source) |
| 2018-02-15 20:27:27 -0500 | asked a question | Robot localization fusing wheel and visual odometry Robot localization fusing whell and visual odometry Hello. I'm trying to fuse whell and visual odometry in robot_locali |
| 2018-02-14 00:40:42 -0500 | commented question | Rviz odometry is all yellow Yes. I just zoomed out and saw what was not right. I removed check mark from "covariance" in odom display and it work ok |
| 2018-02-12 20:01:52 -0500 | edited question | Rviz odometry is all yellow Rviz odometry is all yellow Hello guys! I have a problem in displaying odometry in Rviz. I use robot localization to fus |
| 2018-02-12 20:01:21 -0500 | asked a question | Rviz odometry is all yellow Rviz odometry is all yellow Hello guys! I have a problem in displaying odometry in Rviz. I use robot localization to fus |
| 2017-12-22 04:34:36 -0500 | received badge | ● Famous Question (source) |
| 2017-11-23 21:00:58 -0500 | asked a question | hector_mapping map issue hector_mapping map issue Hello! I use hector_mapping to build map using odometry and scan data. Everything is ok but whe |
| 2017-11-16 16:09:44 -0500 | received badge | ● Enthusiast |
| 2017-11-12 20:15:06 -0500 | asked a question | Go from gmapping to hector_slam Go from gmapping to hector_slam Hello! I have working gmapping for my robot. Now i want to use hector_slam instead of it |
| 2017-11-07 04:16:43 -0500 | received badge | ● Student (source) |
| 2017-11-07 04:13:46 -0500 | received badge | ● Notable Question (source) |
| 2017-11-02 18:19:07 -0500 | commented answer | robot_pose_ekf and AMCL Okay, thank you I'll try it. |
| 2017-11-02 18:18:46 -0500 | marked best answer | robot_pose_ekf and AMCL Hi! I have my own robot that works on odometry and lidar using AMCL. Everything works perfectly. After that, I decided to use robot_pose_ekf to improve data. I use the MPU6050 sensor and odometry from wheels data for this. /robot_pose_ekf/odom_combined give me a data. But I encountered such a problem that I do not know how to connect the robot_pose_ekf package to my the ready system with the AMCL. I searched the Internet, and did not find the information. In which files do I need to make changes to connect robot_pose_ekf? In launch file I wrote. But navigation does not work. The terminal gets out of error. Here is fragment of my original tf tree of working system, without robot_pose_ekf. Without robot_pose_ekf With robot_pose_ekf graph is the same exept frame called not "odom" but "odom_combined" and published by robot_pose_ekf. |
| 2017-11-02 18:18:46 -0500 | received badge | ● Scholar (source) |
| 2017-10-31 19:36:47 -0500 | commented answer | robot_pose_ekf and AMCL Okay.How i can change "odom_frame_id" in robot_pose_ekf? I wrote param name="odom_frame_id" value="odom"/ in launching r |
| 2017-10-31 19:25:58 -0500 | commented answer | robot_pose_ekf and AMCL Okay. And how i can change "odom_frame_id" in robot_pose_ekf? I wrote param name="odom_frame_id" value="odom"/ in launch |
| 2017-10-31 19:25:21 -0500 | commented answer | robot_pose_ekf and AMCL Okay. And how i can change "odom_frame_id" in robot_pose_ekf? I wrote param name="odom_frame_id" value="odom"/ in launch |
| 2017-10-31 19:13:38 -0500 | commented answer | robot_pose_ekf and AMCL Okay. And how i can change "odom_frame_id" in robot_pose_ekf? I wrote param name="odom_frame_id" value="odom"/ in launch |
| 2017-10-31 19:13:27 -0500 | commented answer | robot_pose_ekf and AMCL Okay. And how i can change "odom_frame_id" in robot_pose_ekf? I wrote param name="odom_frame_id" value="odom"/ in launch |
| 2017-10-31 19:05:23 -0500 | commented answer | robot_pose_ekf and AMCL Okay. And how i can change "odom_frame_id" in robot_pose_ekf? I wrote param name="odom_frame_id" value="odom"/ in launch |
| 2017-10-31 18:59:18 -0500 | commented answer | robot_pose_ekf and AMCL Okay. And how i can change "odom_frame_id" in robot_pose_ekf? I wrote param name="odom_frame_id" value="odom"/ but nothi |
| 2017-10-31 18:59:09 -0500 | commented answer | robot_pose_ekf and AMCL Okay. And how i can change "odom_frame_id" in robot_pose_ekf? I wrote param name="odom_frame_id" value="odom"/ but nothi |
| 2017-10-31 18:58:56 -0500 | commented answer | robot_pose_ekf and AMCL Okay. And how i can change "odom_frame_id" in robot_pose_ekf? I wrote but nothing happens. |
| 2017-10-31 18:57:57 -0500 | commented answer | robot_pose_ekf and AMCL Okay. And how i can change "odom_frame_id" in robot_pose_ekf? I wrote but nothing happens. |
| 2017-10-31 03:17:54 -0500 | commented answer | robot_pose_ekf and AMCL Thank a lot. I'' try it. Can you tell me if I need only to change the odom_frame_id parameter to connect to the amcl and |
| 2017-10-31 03:11:50 -0500 | received badge | ● Supporter (source) |
| 2017-10-31 03:09:19 -0500 | received badge | ● Popular Question (source) |
| 2017-10-30 01:51:21 -0500 | asked a question | robot_pose_ekf and AMCL robot_pose_ekf and AMCL Hi! I have my own robot that works on odometry and lidar using AMCL. Everything works perfectly. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.